初衷是为了方便自己,方便读者快速了解CV领域最新学术动态,偶尔更新若干篇论文概览。内容包括但不限制于目标检测,分割,3D重建,分类,LLM,自动驾驶,机器人,VR、AR,多模态,欢迎大家点赞+关注!

《UniDrive-WM: Unified Understanding, Planning and Generation World Model For Autonomous Driving》是博世北美研究院与博世人工智能中心的最新研究。
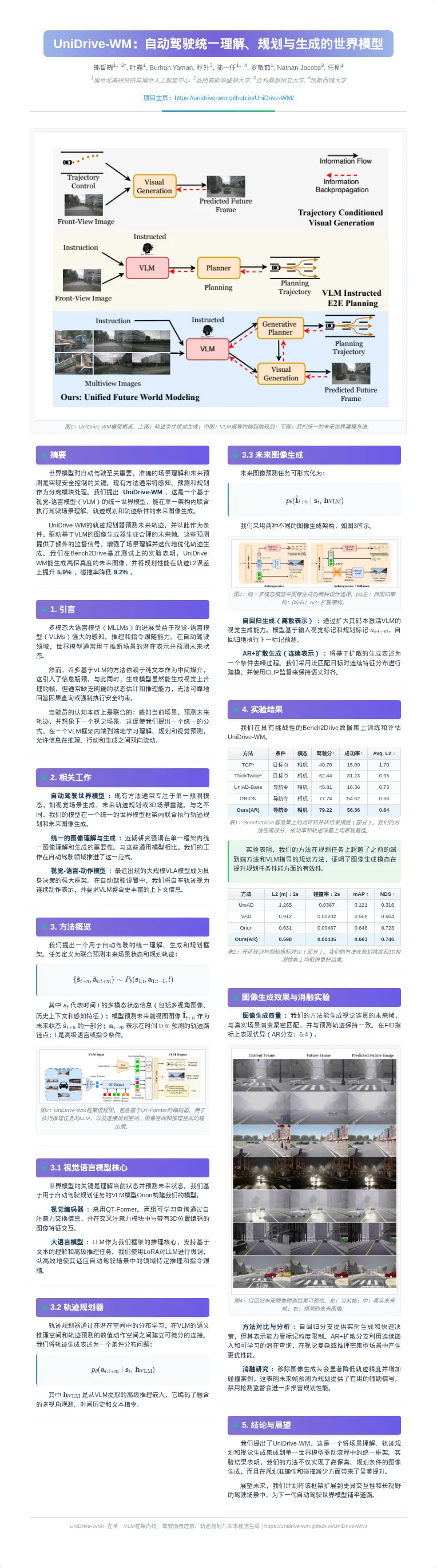
在自动驾驶领域,如何让车辆像人类驾驶员一样,不仅理解当前路况,还能预测并规划出安全、合理的未来轨迹,一直是核心挑战。传统方法通常将感知、预测和规划拆分为独立的模块,导致信息流割裂,决策可能不够连贯。
博世团队提出的UniDrive-WM模型,首次将视觉-语言模型的强大推理能力与图像生成技术深度融合,创造了一个统一的世界模型。它不仅能理解复杂驾驶场景,还能直接规划出未来轨迹,并基于此轨迹生成逼真的未来帧图像。这种“规划-生成”的闭环,为模型提供了额外的监督信号,使其能迭代优化规划结果。在Bench2Drive基准测试中,UniDrive-WM将轨迹误差降低了5.9%,碰撞率减少了9.2%,并生成了高保真的未来场景图像。这项研究标志着自动驾驶系统向更集成、更类人的“端到端”决策迈出了关键一步,为打造更安全、更可靠的自动驾驶大脑提供了全新范式。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
