从新兴地图类型看自动驾驶对地图的依赖与演进
- 2026-03-17 13:25:33
 「自动驾驶地图的进化路径」
「自动驾驶地图的进化路径」
地图对自动驾驶的核心价值,如同考试前的预答题清单,提前提供核心场景的关键信息,帮助系统降低实时决策难度、提升安全性和效率,具体体现在三个层面:
1. 场景预判:提前加载道路拓扑(如路口结构、车道数量)、交通规则(如限速、转向限制)等信息,避免系统实时识别的延迟与误差,类似预答题让考生提前熟悉考点,减少临场思考压力。
2. 定位辅助:通过地图匹配修正传感器漂移(如GPS误差),尤其在隧道、高楼遮挡等弱感知场景中,地图成为定位“锚点”,确保行驶轨迹不偏离车道。
3. 决策优化:结合地图的历史数据(如事故高发路段)和全局路线信息,优化加速/减速策略、变道时机等,避免临时决策的突兀性,提升乘坐舒适度。
但与预答题不同,自动驾驶需应对动态变化(如临时施工、道路破损,甚至下雨淹水等等),因此“预答题”需结合实时“临场发挥”(传感器感知),才能实现可靠行驶。
自动驾驶依赖地图的业界风向是有起伏的,目前智驾地图的发展逐步从“依赖高精”走向“理性轻图”,清晰分为三个阶段。
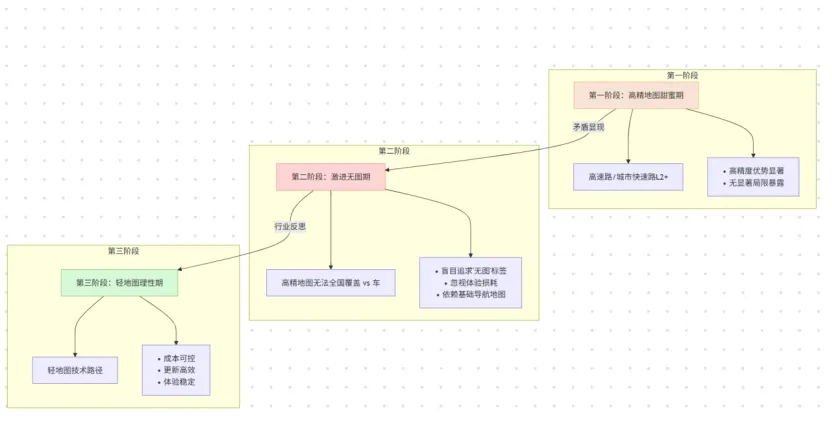
第一阶段是高精地图甜蜜期,核心服务于高速路和城市快速路的L2+辅助驾驶,是辅助驾驶量产初期的核心支撑,此时高精地图的高精度的优势可充分发挥,未暴露明显局限,因此迎来快速发展。
第二阶段是激进无图期。核心矛盾是“高精地图无法全国拓展”与“车企全国卖车、用户全域使用”的诉求冲突,行业盲目追求“无图”标签,虽通过测试验证无图可行性,但忽视了体验损耗,且本质仍需基础导航地图,并非真正意义上的“完全无图”。
第三阶段目前轻地图理性期,行业回归务实,放弃“极端无图”理念,轻地图凭借“成本可控、更新高效、体验稳定”的优势,成为适配辅助驾驶全国普及的核心选择,既解决了高精地图的局限,又弥补了激进无图的体验短板。
目前彻彻底底的无图或者隐式地图(实时生图)还不成熟,未来如何要看业界实际发展。
传统高精地图(HD Map)→ 轻量级地图 → 动态更新地图 → 隐式地图(AI生成),整体趋势是“去高精化、强动态性、低成本化”,适配两段式到一段式端到端的技术路线升级。
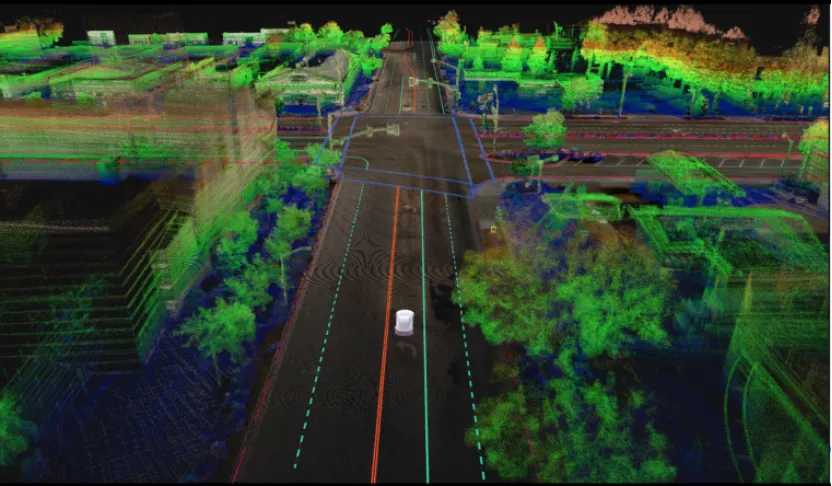
图| 传统高精地图是激光雷达点云©【深蓝AI】编译
我们把核心地图类型及特征列了一张表

新兴类型有如下核心优势
1. 动态更新地图:解决传统高精地图“滞后性”痛点,通过众包模式快速响应道路施工、临时管制等变化,适配城市复杂路况。
2. 隐式地图:完全摆脱实体地图依赖,由模型自主学习道路规则(如无标线道路的行驶边界),实现“无图部署”,大幅降低地图采集与更新成本,是一段式端到端的核心支撑。
3. 混合地图:平衡两段式的可靠性与一段式的灵活性,静态信息从地图获取,动态变化由AI自主识别,兼顾量产落地与复杂场景适配。
轻量级地图是自动驾驶地图演进的核心过渡类型,介于传统高精地图与隐式地图之间,核心定位是“去冗余、保核心、降成本”,精准适配两段式端到端量产需求,同时为一段式端到端提供辅助支撑,核心特点如下:
1. 精度适配量产:采用1-5米的米级精度,摒弃传统高精地图的厘米级冗余细节,仅保留车道级定位、路口识别所需的核心精度,既满足基础驾驶需求,又降低数据存储、传输压力,适配量产车型硬件水平。例如华为ADS 2.0配套轻地图,仅保留车道中心线关键坐标点,即可满足城市与高速定位需求。
2. 内容高度精简:遵循“只保留自动驾驶必需信息”原则,核心包含三类关键内容——道路拓扑信息(车道数量、路口结构、匝道连接)、基础交通规则(限速、转向限制)、关键定位锚点(红绿灯、隧道出入口),剔除路面裂缝、井盖等无关细节,降低机器解析复杂度,适配两段式感知编码层输入需求。
3. 全流程成本可控:采集成本仅为传统高精地图的1/5-1/10,可通过众包模式、轻量化采集设备完成,单公里成本降至百元级;更新周期缩短至月级,通过众包数据+AI自动校验实现准实时局部修正,大幅降低采集与更新的人力、物力成本,适合城市全域覆盖。
4. 动态性适中:采用“月级常规更新+局部准实时修正”模式,核心静态信息(道路拓扑、交通规则)定期更新保证稳定性,临时施工、红绿灯故障等动态变化通过众包数据快速修正,兼顾可靠性与时效性,适配量产场景的复杂路况。
5. 适配性极强:既是两段式端到端量产方案的标配(如华为ADS 2.0、理想One Model),可为感知层提供结构化输入;也能辅助一段式端到端方案,在弱感知场景中修正定位,实现“轻图+隐式地图”混合模式;同时可升级为动态轻地图或融合隐式地图,衔接地图向“无图化”演进的趋势。
6. 核心短板:米级精度无法满足半导体厂区、港口等封闭场景的厘米级定位需求;缺少路面细节信息,复杂路况下需依赖传感器实时感知补充,无法单独支撑L4及以上高级别自动驾驶的全场景需求,需与其他地图或传感器融合使用。
自动驾驶地图的存储格式与文件格式核心取决于地图的精度、内容复杂度及适配的自动驾驶技术路线,不同地图类型因数据量、使用场景差异,格式选择各有侧重。
1. 传统高精地图:以结构化存储为主,适配厘米级高精度数据的存储与快速解析,满足两段式端到端对全量细节的需求。
存储格式:采用“矢量存储+栅格存储”混合模式,矢量存储用于记录车道线、道路标识等结构化几何信息(如坐标、形状),栅格存储用于保留路面纹理、周边环境等影像数据;
文件格式:主流为行业标准格式与厂商自定义格式结合,包括OpenDRIVE(国际通用标准,支持复杂道路拓扑描述)、NDS(汽车行业联盟标准,适配车载场景),以及高德、百度等厂商自定义格式(如高德HDMap格式、百度Apollo HDMap格式),文件后缀多为.odr(OpenDRIVE)、.nds(NDS),单文件体积较大(单公里可达数十MB)。
2. 轻量级地图:以轻量化矢量存储为主,侧重核心信息的高效存储与传输,适配量产车型的硬件存储与算力水平。
存储格式:纯矢量存储,仅保留道路拓扑、交通规则、定位锚点等核心结构化信息,剔除栅格影像等冗余数据,采用压缩编码减少存储体积;
文件格式:以简化版OpenDRIVE、自定义轻量格式为主,部分厂商采用protobuf(PB)格式(二进制压缩,体积小、解析快),文件后缀多为.odr(简化版)、.pb、.lightmap,单公里文件体积仅为高精地图的1/10-1/20(通常1-5MB/公里),适配华为ADS 2.0、理想One Model等量产方案。
3. 动态更新地图:采用“基础矢量+动态增量”存储模式,兼顾静态基础信息的稳定性与动态变化信息的实时性。
存储格式:基础道路拓扑采用轻量级矢量存储,动态变化信息(如临时施工、限速调整)采用增量存储(仅记录变化部分,不重复存储基础信息),支持实时增量更新;
文件格式:基础部分采用轻量级地图的PB格式或简化版OpenDRIVE格式,动态增量部分采用JSON、XML格式(文本格式,便于快速传输与解析),文件后缀多为.pb(基础部分)、.json(增量部分),支持小时级甚至分钟级增量推送,适配特斯拉HydraNet、文远知行WePilot 3.0的动态更新需求。
4. 隐式地图:无实体存储格式与文件格式,核心依赖AI模型参数存储,本质是“地图信息内化为模型认知”。
存储格式:无独立地图存储,道路特征、交通规则等地图信息,通过模型训练固化到AI模型参数中,与模型权重文件一同存储;
文件格式:无专属地图文件,仅需存储模型权重文件,主流格式为.pt(PyTorch模型)、.pb(TensorFlow模型)、.onnx(跨框架通用模型),文件体积取决于模型参数规模(通常数GB至数十GB),无需额外存储地图文件,适配特斯拉FSD V12、Waymo EMMA等一段式端到端方案。
5. 混合地图:采用“轻量矢量+模型参数”混合存储模式,兼顾静态基础信息与动态适应能力。
存储格式:静态基础拓扑信息(如道路边界、车道数量)采用轻量级矢量存储,动态场景适应所需的地图特征的存储在AI模型参数中,实现“静态信息可复用、动态信息可学习”;
文件格式:轻量矢量部分采用PB格式或简化版OpenDRIVE格式,模型参数部分采用.pt、.pb格式,文件体积介于轻量级地图与隐式地图之间,适配商汤R-UniAD、华为ADS 3.0等准一段式端到端方案。
车载场景下的地图文件均采用二进制压缩存储(如PB、NDS格式),减少存储占用与传输带宽;云端更新场景下,动态增量部分多采用文本格式(JSON、XML),便于快速解析与推送;隐式地图因无实体文件,其“地图能力”完全依赖模型训练效果,无需额外的地图存储与更新成本。
两段式将地图信息拆分为结构化数据,输入感知编码层,与传感器数据融合生成中间表征,具体流程:
1. 地图预处理:加载轻地图/高精地图的道路拓扑、车道属性等信息,转化为栅格图、向量坐标等机器可识别格式;
2. 多源融合:感知层将摄像头/LiDAR的实时数据与地图的静态信息匹配,如通过地图确认车道数量,辅助传感器识别被遮挡的车道线;
3. 约束输出:决策控制层以地图的交通规则(如禁止左转)为约束,优化控制指令,避免生成违反规则的行驶轨迹。
例如华为ADS 2.0的BEV感知层,将轻地图的道路边界信息作为参考,提升复杂路口的车道级定位精度;理想One Model则通过地图的全局路线信息,优化城市道路的跟车距离与变道时机。
一段式端到端不直接输入实体地图文件,而是将地图信息融入模型训练或由模型自主生成,具体方式:
1. 训练阶段:将海量地图数据(如道路拓扑、交通规则)与传感器数据、控制指令一起投喂给模型,让模型自主学习“道路特征-驾驶行为”的映射关系,地图成为训练素材而非实时输入;
2. 推理阶段:模型通过传感器数据自主生成“隐式地图”(如识别道路标线、路口结构),无需依赖外部地图文件,仅在部分场景(如高速)引入轻地图作为辅助验证。
例如特斯拉FSD V12通过万亿级含地图特征的视频数据训练,模型可自主识别无标线道路的行驶边界,仅在跨城高速场景参考基础道路拓扑信息;Waymo EMMA则完全由多模态大模型生成虚拟道路场景,地图信息已内化为模型的认知能力。
尽管一段式端到端实现了“无图部署”,但“完全无图”(彻底抛弃任何地图相关信息)在工程化落地中并不经济,核心原因如下:
1.训练成本极高:完全无图要求模型从零学习所有道路规则(如限速标准、转向优先级),需消耗超百亿公里级的海量数据,且长尾场景(如特殊交通标识)的覆盖成本呈指数级增长,远超依赖地图的方案。
2. 弱感知场景可靠性不足:在隧道、暴雨、浓雾等传感器性能衰减的场景中,无地图辅助的定位误差会显著增大,可能导致车道偏离,而低成本的轻地图即可解决这一问题,性价比远高于单纯提升传感器性能。
3. 合规与安全风险:完全无图意味着系统无法提前获取交通规则(如禁行区域),可能因实时识别遗漏导致违规行驶;同时,缺乏地图的全局路线约束,在复杂路口(如五向交叉路口)易出现决策犹豫,增加碰撞风险。
从量产实践来看,即便是纯视觉一段式方案的特斯拉FSD V12,也会在核心道路参考基础拓扑信息(如高速出入口位置),而非完全“无图”;文远知行WePilot 3.0作为一段式量产方案,同样引入轻地图辅助定位,本质是“轻图+隐式地图”的混合模式,平衡成本与可靠性。
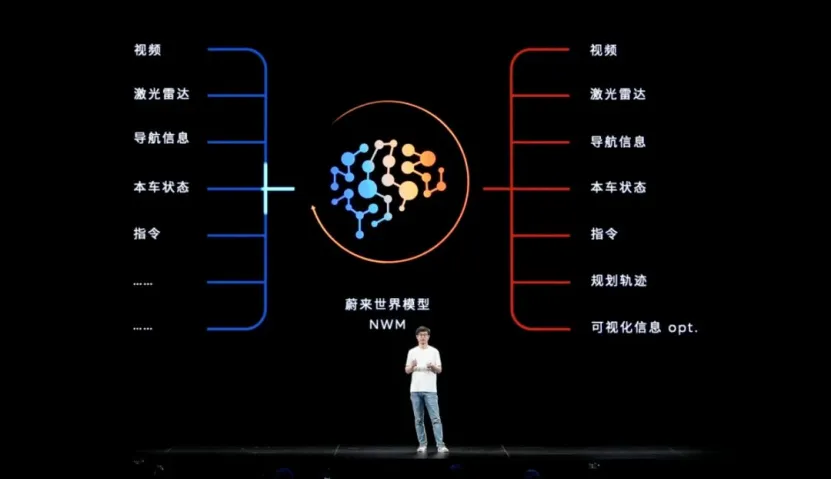
图| 地图已经隐藏在世界模型中©【深蓝AI】编译
这和考试一样,有地图好比开卷考试,或者好比英语考试准许带字典;无地图好比闭卷考试,对考生自动驾驶汽车的脑力负担大得多,考生得有个大脑袋才行。
自动驾驶对地图的依赖本质是“技术路线适配”问题,谈不上“非黑即白”的选择。
两段式端到端依赖轻地图/高精地图作为结构化输入,地图是提升感知精度、降低决策难度的关键,适配当前量产落地需求,核心优势是可靠性高、数据效率高;
一段式端到端从“依赖实体地图”转向“依赖隐式地图(也就是实时建图)+轻图辅助”,地图从实时输入转化为训练素材,核心优势是适配性强、跨区域落地成本低;
未来地图将向“轻量化、动态化、融合化”演进,两段式逐步降低地图依赖,一段式保留轻图辅助,最终形成“隐式地图为主、轻图为辅”的混合模式,既发挥AI自主学习的灵活性,又利用地图的低成本定位与决策优化价值。
商务推广/稿件投递请添加:xinran199706(备注商务合作)



· 计划周期:深蓝学院将以3个月为一个周期,建立工程师&学术研究者的「同好社群」
· 覆盖方向:自动驾驶、具身智能(人形、四足、轮式、机械臂)、视觉、无人机、大模型、医学人工智能……16个热门领域
扫码添加阿蓝
选择想要加入的交流群即可
(按照提交顺序邀请,请尽早选择)
👇


