当小鹏汽车在近期发布会上将自己定位为“具身智能公司”时,理想汽车几乎在同一时期表达了相似的战略意图。两家中国头部造车新势力的不约而同,绝非偶然的巧合,而是整个自动驾驶行业在经历多年技术迭代后,对自身本质的一次集体性重新审视。这种审视的核心,正是当下被频繁提及却又众说纷纭的概念——物理AI。
物理AI究竟是什么?这个问题的答案本身就经历了一场认知演变。如果我们回溯人工智能的发展脉络,会发现AI研究很长时间里都聚焦于虚拟环境中的认知任务——下棋、识别图像、理解语言、处理数据。这些任务当然极具价值,但它们有一个共同的特征:发生在一个被简化的、可预测的世界里。棋盘有明确的规则,图像有清晰的边界,数据有结构化的格式。然而,当我们试图让一台机器真正理解三维物理世界,能够在这个世界中自主移动、与物体交互、应对千变万化的真实场景时,传统的AI范式就显得力不从心。物理AI正是在这个背景下被提出的,它的核心理念是:人工智能不仅要能“思考”,还要能“感知”和“行动”,而这种感知和行动必须根植于对物理世界的深刻理解之中。
从这个意义上说,物理AI可以被理解为一种将感知、推理和执行深度融合的智能系统。与传统AI不同,它需要处理的核心问题包括:理解空间的几何结构及其随时间的动态变化,理解物体之间的物理关系和因果链条,理解自身行动对物理世界的影响并预测其后果。Boston Dynamics的机器人能够完成后空翻,特斯拉的Optimus正在学习精细操作技能,这些看似不同的技术突破,实际上都在指向同一个方向——机器正在获得与物理世界深度交互的能力。这种能力不仅仅是更灵敏的传感器或更精确的执行器,更是一种对物理规律的“直觉性”理解,一种将视觉、触觉、动觉等信息统一整合的具身认知框架。

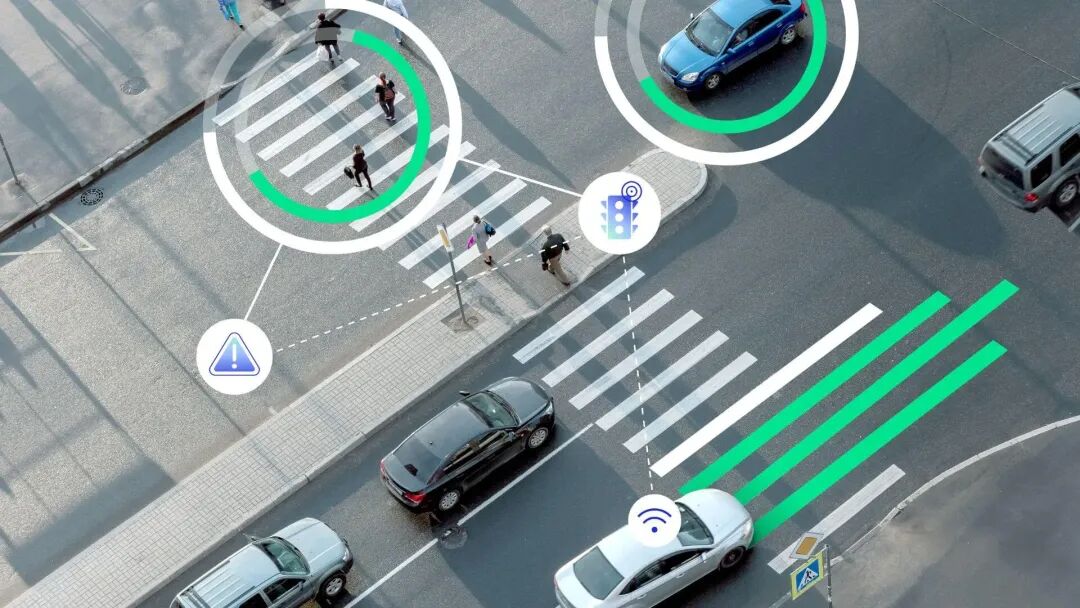
现在的问题是,这种物理AI的研究成果,能否真正惠及自动驾驶?答案几乎是肯定的,但这种惠及的方式可能比许多人预想的更加深远。在技术层面,自动驾驶从一开始就是一种典型的“物理AI”任务。一辆行驶中的汽车需要实时感知周围的交通参与者、道路标识、天气条件,需要理解这些元素之间的空间关系和运动轨迹,需要在毫秒级的时间内做出安全、舒适、高效的决策。更重要的是,车辆的行动会直接影响物理世界的状态——转向、加速、刹车,每一个决策都会产生真实的物理后果。这些特征与物理AI的核心关切高度重合:感知与行动的闭环、与物理世界的深度交互、对不确定性的鲁棒处理。
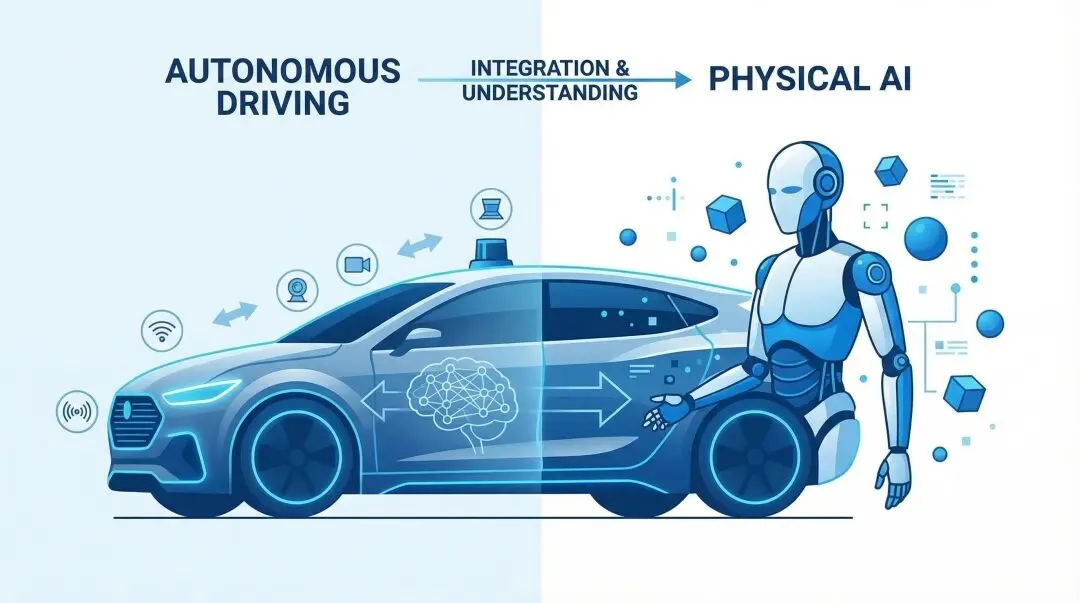
正是这种深层的技术共鸣,让自动驾驶公司开始将自己的定位从“智能汽车制造商”升级为“具身智能公司”。这种话语策略的转变背后,是一套更加宏大的叙事逻辑:如果自动驾驶汽车能够理解复杂的物理世界,能够在开放环境中做出安全决策,那么类似的感知-决策框架完全可以迁移到其他领域——机器人、自动工厂、智能基础设施。小鹏汽车推出的AI机器人、理想汽车在家庭场景中的智能化布局,都是这种战略延伸的具体体现。从这个角度看,物理AI不仅仅是一项技术,更是一种新的企业叙事的锚点,它让这些公司得以将自己从“汽车公司”的桎梏中解放出来,描绘一幅更加广阔的智能图景。
然而,当我们把目光投向更远的未来,一个更加根本性的问题浮现出来:自动驾驶的终局,真的是物理AI吗?这个问题或许需要从两个层面来理解。从狭义上说,自动驾驶作为一项技术,已经走在通向物理AI的路上。端到端的神经网络架构正在将感知、预测、规划整合为统一的模型,大语言模型和多模态模型开始被引入车辆决策系统,车路云一体化的理念正在构建更加庞大的智能交通生态系统。这些趋势都在指向一个方向:未来的自动驾驶系统将越来越像是一个能够在物理世界中自主运行的智能体,它理解世界、预测变化、规划行动、持续学习。

但从更广义的视角来看,物理AI可能只是自动驾驶演进过程中的一个阶段,而非终极形态。自动驾驶的终极挑战,或许不仅仅是让车辆能够在物理世界中安全行驶,而是重新定义人与交通工具、人与城市空间、人与移动体验之间的关系。当技术足够成熟时,“驾驶”这件事本身可能会发生质的变化——人类可能不再需要“驾驶”汽车,而是与一个高度智能的移动伙伴进行自然交互。这种交互超越了单纯的感知-决策-执行循环,进入了意义建构、情感连接、价值共识的领域。在那个阶段,我们可能需要新的概念框架来描述这种关系,而“物理AI”这个术语,或许只是漫长征途中的一个路标。
对于那些在自动驾驶领域深耕的从业者和观察者而言,物理AI概念的兴起提供了一个重新审视行业本质的机会。自动驾驶从来都不仅仅是“让车自己开”这么简单,它本质上是人类试图创造一种能够在复杂物理世界中自主运行的智能系统的一次实践。这条道路漫长且充满挑战,但正是这种挑战本身,赋予了它独特的魅力和价值。无论是小鹏、理想还是其他投身于这场变革的企业,它们的探索都在为这个领域积累宝贵的经验和认知。而这些积累,终将成为通向更深远智能时代的基石。