这几年跑汽车圈,发现个挺有意思的事儿——以前大家聊自动驾驶,眼睛都盯着激光雷达转没转、算力芯片跑多快,现在越来越多人开始念叨一个词儿:仿真。不是那种打游戏的简单模拟,是真刀真枪给自动驾驶系统搭“虚拟练车场”的技术。
记得前两年跟某新势力工程师聊天,他吐槽说现在测自动驾驶跟养孩子似的,得一点点教。早期靠实车路测,白天跑城区,晚上蹲郊区,碰上个暴雨天还得抢着测传感器抗干扰。成本能把研发预算烧穿。”
现在不一样了,端到端智驾成了主流,系统要处理的路况比之前复杂十倍不止。就像教孩子认路,以前记几条固定路线就行,现在得让他自己应对早晚高峰、突发施工、甚至是动物横穿马路。这时候再靠实车慢慢磨,根本赶不上量产节奏。于是乎,仿真这事儿突然就火了——它不是简单的“虚拟开车”,是把真实世界的物理规律、传感器脾气、甚至天气变化都揉进数字世界里,让系统在里面“闭着眼练”。

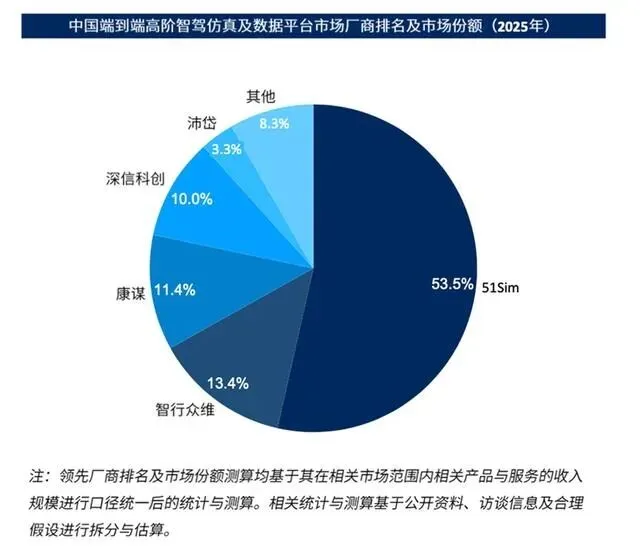
最近看弗若斯特沙利文的报告,里头有个数据挺扎眼:在中国端到端高阶智驾仿真这块,51Sim占了53.5%的市场份额。说实话,刚看到这个数我还愣了一下——仿真这行听着玄乎,没想到集中度这么快就起来了。后来跟几个业内人士唠,才明白这里头的门道。
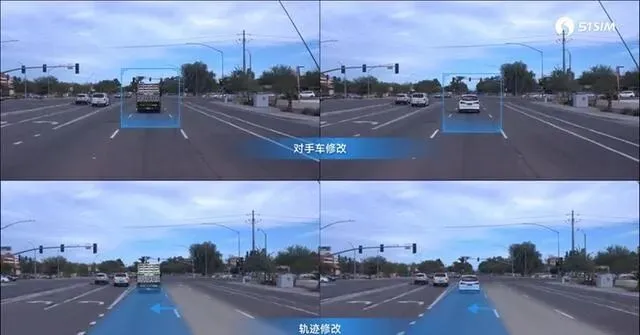
仿真平台可不是做个好看的3D动画就行。你得能还原真实道路的每一粒石子,得让激光雷达扫出来的点云跟实车误差不超过5%,得让摄像头拍出来的画面连阴影角度都对得上。去年参观过一家仿真公司的实验室,工程师现场演示:他们拿一段真实路采视频,导入系统后,不仅能复刻当时的红绿灯配时、车道线磨损程度,连路边广告牌的反光都能调得跟实拍一模一样。更绝的是,系统能自动生成几百种变体——比如把晴天改成雾天,把轿车换成卡车,甚至调整太阳角度让传感器产生特定噪点。这种“高保真+可编辑”的本事,没点硬功夫根本玩不转。
51Sim的SimOne平台就是这么一步步啃下硬骨头的。更关键的是传感器物理建模,摄像头的畸变、激光雷达的多径效应、毫米波雷达的雨衰特性,都得按真实参数校准。有工程师跟我开玩笑:“现在仿真测试过的算法,上实车基本不用大改,就跟提前在‘平行世界’里练熟了再来考试似的。”
这行门槛高,所以一旦站稳脚跟,客户黏性就特别强。车企研发流程里,仿真系统不是个“可选项”,是贯穿全周期的“基础设施”。从算法预训练到功能验证,再到量产前的大规模压力测试,都得在仿真环境里过一遍。有主机厂的朋友说,他们选仿真平台跟选ERP系统似的,换起来比换生产线还麻烦。所以现在市场上,能接住主流车企量产项目的玩家没几个,51Sim能服务100多家客户,从新势力到传统大厂,从自动驾驶公司到Tier1供应商,这规模效应一上来,新玩家想挤进来就更难了。
更值得琢磨的是仿真角色的“进化”。以前它就是个“测试工具”,现在慢慢变成“数据工厂+训练场”。这就好比教练不仅能带学员复盘过去的比赛,还能根据战术需求设计全新的对抗练习。以后自动驾驶系统学的不只是“见过的情况”,更是“可能遇到的情况”,这种持续学习能力,才是应对复杂路况的关键。
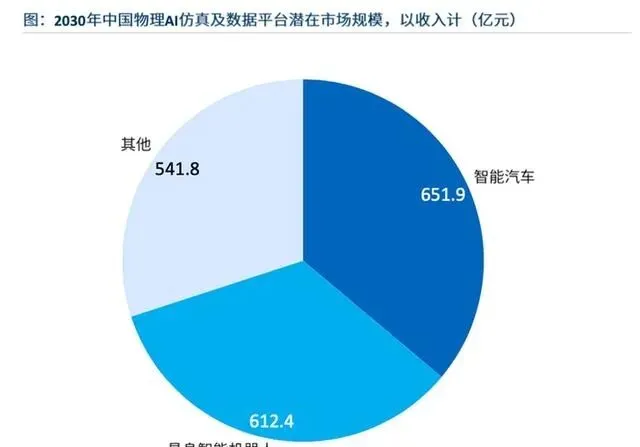
现在再看那53.5%的市占率,其实是个信号。自动驾驶技术到了新阶段,拼的不只是单车智能,更是整个研发体系的效率。仿真作为连接数据、算法和验证的核心环节,正在从“幕后”走到“台前”。沙利文预测到2030年,中国物理AI仿真市场能破1800亿,其中智驾仿真就占650亿。这个数字背后,是无数个“虚拟练车场”在搭建,是算法在代码里反复碰撞,是智能系统离“真正懂路”又近了一步。
说到底,自动驾驶要落地,得让机器在“数字世界”里把能踩的坑都踩遍,才能在真实路上少栽跟头。这个被低估的技术环节,现在成了行业争抢的“地基”。至于谁能把这块地基夯得更实,可能再过两年,答案会更清楚。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
