摘要
随着高阶自动驾驶技术的量产落地与研发迭代,仿真测试已从辅助验证工具升级为自动驾驶全生命周期研发的核心基础设施,是解决实车测试成本高、极端场景覆盖难、功能安全与预期功能安全合规要求的核心手段。本文系统梳理了当前自动驾驶仿真测试的核心架构、主流技术体系、工程落地范式与行业标准,重点阐述了高保真多传感器仿真、自动化场景生成、云原生闭环测试、仿真置信度量化等前沿关键技术,分析了当前行业面临的核心挑战与未来发展方向,为算法工程师快速建立仿真测试完整知识体系、掌握行业最新技术动态提供系统性参考。
关键词:自动驾驶仿真测试;高保真传感器仿真;场景生成;数据闭环;预期功能安全;数字孪生
引言
高阶自动驾驶(L2+~L4)的商业化落地,高度依赖算法在海量复杂场景下的安全性与鲁棒性验证。据行业统计,L4级自动驾驶的安全验证需要累计百亿公里级的测试里程,纯实车测试不仅面临极高的时间与经济成本,更难以覆盖低概率、高风险的极端Corner Case,同时无法满足ISO 26262、ISO 21448等国际标准对功能安全与预期功能安全的强制验证要求。
仿真测试凭借可复现、可扩展、低成本、高安全的核心优势,已成为自动驾驶算法开发、功能验证、合规认证、量产落地全流程中不可或缺的核心环节。近年来,随着数字孪生、大模型、云原生、实时光线追踪等技术的快速发展,自动驾驶仿真测试技术体系发生了根本性变革,从传统的单机静态场景验证,升级为与数据闭环深度耦合的高保真、大规模、全自动化的虚实融合验证体系。本文聚焦2020年以来的行业主流技术与前沿进展,不涉及早期技术方案,为自动驾驶算法工程师提供入门级的系统性参考。
一、自动驾驶仿真测试的核心架构与研发定位
1.1 仿真测试在自动驾驶研发体系中的核心定位
仿真测试贯穿自动驾驶算法研发的全流程,覆盖模型在环(MIL)、软件在环(SIL)、硬件在环(HIL)、车辆在环(VIL)全验证阶段,同时已深度融入自动驾驶数据闭环体系,成为实车数据价值挖掘、算法快速迭代的核心载体:
- MIL/SIL阶段:算法开发的核心环节,算法工程师可在代码开发、模型迭代过程中,快速验证算法的功能正确性与鲁棒性,定位失效场景;在*CI/CD研发流程中,每次算法代码提交都会触发全量SIL回归测试,保障算法迭代的稳定性。
- HIL/VIL阶段:量产落地的核心环节,用于验证自动驾驶域控制器、传感器硬件、整车电控系统的硬件级功能与性能,满足功能安全的硬件验证要求,是量产前合规认证的核心环节。
- 数据闭环核心载体:实车采集的场景数据通过自动化提取、泛化扩增形成海量仿真用例,通过大规模并行仿真完成算法全量验证,定位算法薄弱环节,再针对性完成算法优化与数据补充,形成“实车数据-仿真测试-算法迭代”的完整闭环,是当前高阶自动驾驶研发的标准范式。
1.2 自动驾驶仿真系统的核心分层架构
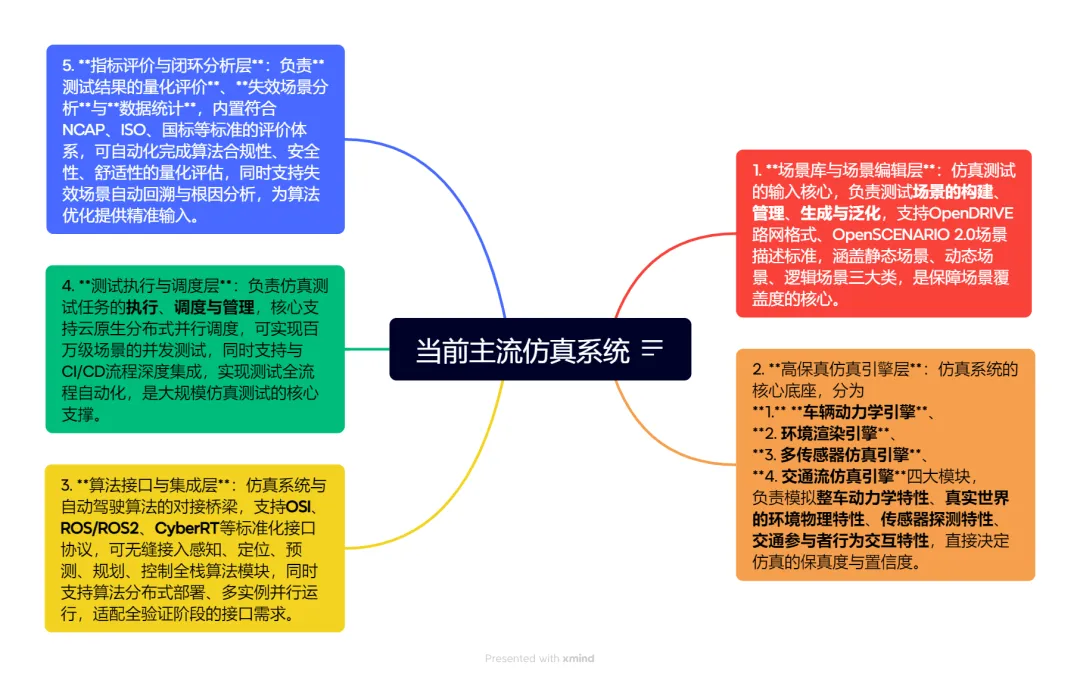
当前主流仿真系统均采用模块化的分层架构,各层职责清晰、可灵活扩展,核心分为5层:
- 场景库与场景编辑层:仿真测试的输入核心,负责测试场景的构建、管理、生成与泛化,支持OpenDRIVE路网格式、OpenSCENARIO 2.0场景描述标准,涵盖静态场景、动态场景、逻辑场景三大类,是保障场景覆盖度的核心。
- 高保真仿真引擎层:仿真系统的核心底座,分为1. 车辆动力学引擎、2. 环境渲染引擎、3. 多传感器仿真引擎、4. 交通流仿真引擎四大模块,负责模拟整车动力学特性、真实世界的环境物理特性、传感器探测特性、交通参与者行为交互特性,直接决定仿真的保真度与置信度。
- 算法接口与集成层:仿真系统与自动驾驶算法的对接桥梁,支持OSI、ROS/ROS2、CyberRT等标准化接口协议,可无缝接入感知、定位、预测、规划、控制全栈算法模块,同时支持算法分布式部署、多实例并行运行,适配全验证阶段的接口需求。
- 测试执行与调度层:负责仿真测试任务的执行、调度与管理,核心支持云原生分布式并行调度,可实现百万级场景的并发测试,同时支持与CI/CD流程深度集成,实现测试全流程自动化,是大规模仿真测试的核心支撑。
- 指标评价与闭环分析层:负责测试结果的量化评价、失效场景分析与数据统计,内置符合NCAP、ISO、国标等标准的评价体系,可自动化完成算法合规性、安全性、舒适性的量化评估,同时支持失效场景自动回溯与根因分析,为算法优化提供精准输入。
二、当前主流仿真平台与技术体系
2.1 国际主流商用仿真平台
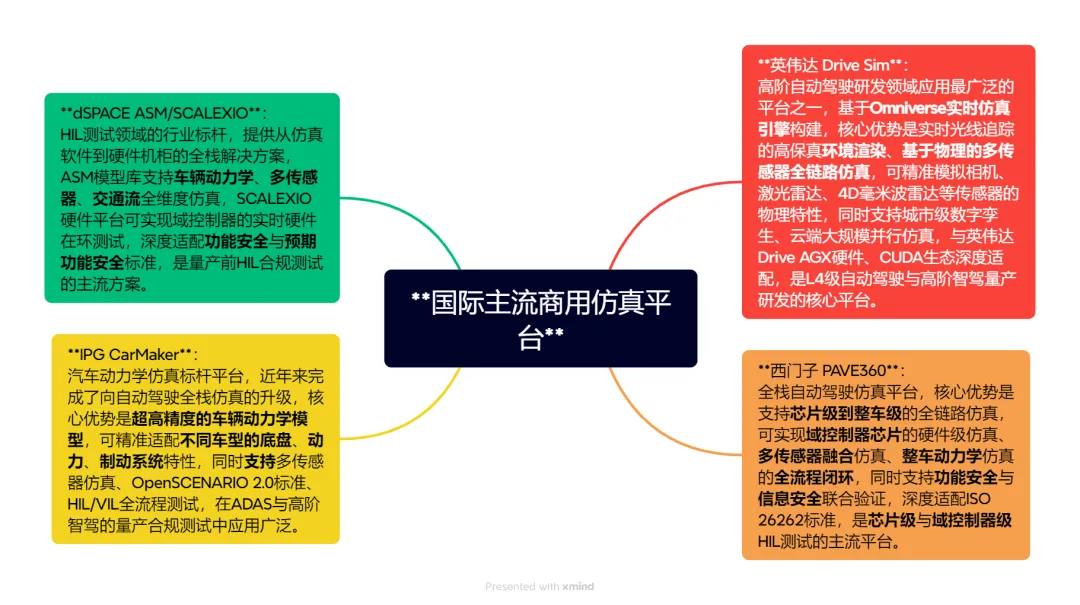
- 英伟达 Drive Sim:高阶自动驾驶研发领域应用最广泛的平台之一,基于Omniverse实时仿真引擎构建,核心优势是实时光线追踪的高保真环境渲染、基于物理的多传感器全链路仿真,可精准模拟相机、激光雷达、4D毫米波雷达等传感器的物理特性,同时支持城市级数字孪生、云端大规模并行仿真,与英伟达Drive AGX硬件、CUDA生态深度适配,是L4级自动驾驶与高阶智驾量产研发的核心平台。
- 西门子 PAVE360:全栈自动驾驶仿真平台,核心优势是支持芯片级到整车级的全链路仿真,可实现域控制器芯片的硬件级仿真、多传感器融合仿真、整车动力学仿真的全流程闭环,同时支持功能安全与信息安全联合验证,深度适配ISO 26262标准,是芯片级与域控制器级HIL测试的主流平台。
- IPG CarMaker:汽车动力学仿真标杆平台,近年来完成了向自动驾驶全栈仿真的升级,核心优势是超高精度的车辆动力学模型,可精准适配不同车型的底盘、动力、制动系统特性,同时支持多传感器仿真、OpenSCENARIO 2.0标准、HIL/VIL全流程测试,在ADAS与高阶智驾的量产合规测试中应用广泛。
- dSPACE ASM/SCALEXIO:HIL测试领域的行业标杆,提供从仿真软件到硬件机柜的全栈解决方案,ASM模型库支持车辆动力学、多传感器、交通流全维度仿真,SCALEXIO硬件平台可实现域控制器的实时硬件在环测试,深度适配功能安全与预期功能安全标准,是量产前HIL合规测试的主流方案。
2.2 国内主流商用仿真平台
- 腾讯 TAD Sim:国内领先的自动驾驶仿真平台,基于腾讯游戏引擎的实时光追渲染能力构建,核心优势是高保真数字孪生场景构建、云原生大规模并行仿真能力,支持城市级路网数字孪生映射、实车数据场景自动化提取与泛化,深度适配国内复杂交通场景与法规要求,在国内主机厂与智驾方案商的量产研发中应用广泛。
- 百度 Apollo Sim:与Apollo开源自动驾驶框架深度耦合的仿真平台,完全适配Apollo的CyberRT通信框架与全栈算法模块,内置海量国内交通场景库(需要付费),支持实车数据场景自动提取、云端并行仿真、CI/CD自动化测试,是基于Apollo框架进行算法研发的首选平台,同时支持商业化定制化解决方案,适配量产研发需求。
- 华为 Octopus 仿真平台:基于华为云原生架构构建,核心优势是支持端边云协同的全流程仿真测试,与华为MDC计算平台深度适配,支持高保真多传感器仿真、大模型场景自动化生成、亿级场景云端并行测试,内置符合国内标准的合规测试体系,在华为生态内的智驾量产项目中广泛应用。
2.3 主流开源仿真框架
- CARLA:全球最流行的开源自动驾驶仿真框架,基于Unreal Engine构建,完全开源免费,支持OpenDRIVE、OpenSCENARIO标准,提供高保真环境渲染、多传感器仿真、交通流仿真能力,内置丰富的场景库与算法接口,支持ROS/ROS2、Python/C++ API,可无缝接入自动驾驶全栈算法,是算法研发、学术研究领域的主流开源平台,最新版本已支持大模型场景生成、4D毫米波雷达仿真等前沿能力。
- Apollo 仿真模块:百度Apollo开源框架内置的仿真模块,与Apollo算法深度集成,完全适配CyberRT通信框架,支持实车记录文件的回放仿真、场景编辑与自动化测试,可快速实现Apollo算法的MIL/SIL验证,是基于Apollo进行算法开发的入门首选开源方案。
三、当前仿真测试的核心关键技术与前沿进展
3.1 高保真多传感器物理仿真技术
多传感器仿真是连接仿真环境与感知算法的核心桥梁,当前技术已从传统几何级仿真升级为基于物理的全链路仿真,可精准复现传感器从信号接收、处理到输出的全流程特性,核心覆盖四大类传感器:
- 相机仿真:基于实时光线追踪技术实现高动态范围(HDR)、高分辨率的真实环境渲染,可精准模拟镜头畸变、运动模糊、眩光、鬼影等光学特性,支持ISP图像处理全流程仿真,同时可复现雨、雪、雾、夜间逆光等极端条件下的成像效果,匹配实车相机的真实表现。
- 激光雷达仿真:基于物理的激光传输模型,可精准模拟激光的发射、传播、反射、散射全流程,支持多回波效应、雨雾衰减、镜面反射、鬼影等物理特性,可适配机械旋转式、半固态、固态、Flash激光雷达的参数特性,最新技术已支持点云多普勒效应、运动畸变仿真,完全匹配实车激光雷达的点云输出特性。
- 毫米波雷达仿真:重点突破了传统仿真的精度瓶颈,当前主流技术已支持4D毫米波雷达的全链路物理仿真,可精准模拟毫米波的反射、衍射、多径效应、多普勒频移等特性,支持目标距离、速度、方位角、俯仰角四维信息的精准输出,同时可模拟极端条件下的雷达探测特性,匹配量产4D毫米波雷达的真实性能。
- 组合导航仿真:可精准模拟GNSS卫星信号、IMU惯性测量单元的输出特性,支持城市峡谷、隧道等场景下的信号衰减、多径效应、丢星等特性,同时可模拟IMU的零偏、随机游走、噪声等误差模型,匹配实车组合导航系统的真实定位精度。
此外,当前技术已实现多传感器的时间同步仿真,可精准控制不同传感器的输出时延与时间戳同步精度,误差可控制在毫秒级以内,完全匹配实车多传感器的时间同步特性。
3.2 自动化场景库构建与生成技术
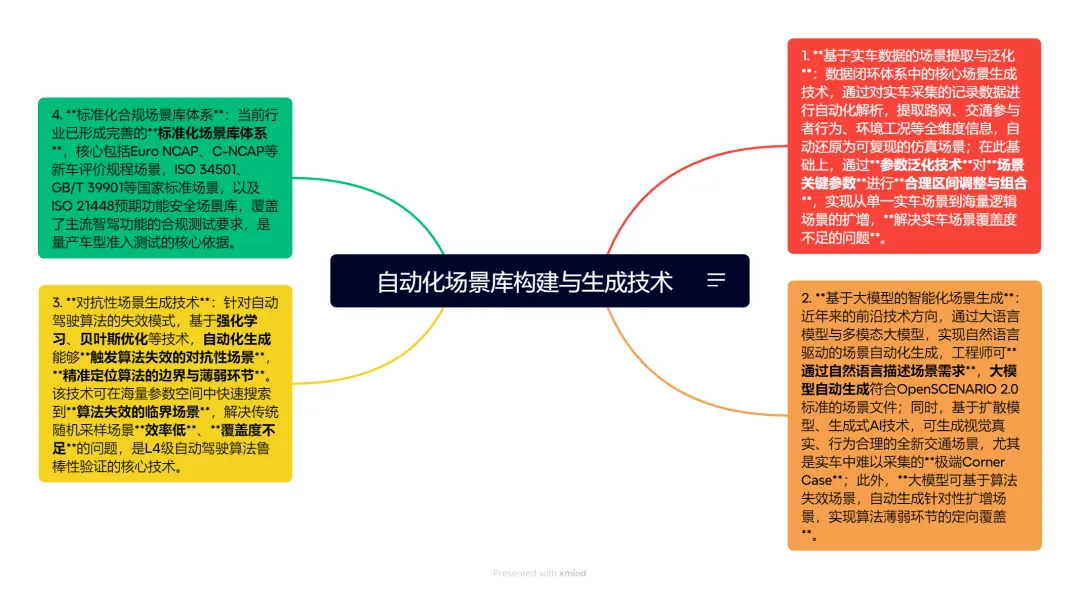
场景库是仿真测试的核心,决定了测试的覆盖度,当前技术已从传统人工编辑场景,升级为自动化、智能化的场景生成体系,核心分为四大技术方向:
- 基于实车数据的场景提取与泛化:数据闭环体系中的核心场景生成技术,通过对实车采集的记录数据进行自动化解析,提取路网、交通参与者行为、环境工况等全维度信息,自动还原为可复现的仿真场景;在此基础上,通过参数泛化技术对场景关键参数进行合理区间调整与组合,实现从单一实车场景到海量逻辑场景的扩增,解决实车场景覆盖度不足的问题。
- 基于大模型的智能化场景生成:近年来的前沿技术方向,通过大语言模型与多模态大模型,实现自然语言驱动的场景自动化生成,工程师可通过自然语言描述场景需求,大模型自动生成符合OpenSCENARIO 2.0标准的场景文件;同时,基于扩散模型、生成式AI技术,可生成视觉真实、行为合理的全新交通场景,尤其是实车中难以采集的极端Corner Case;此外,大模型可基于算法失效场景,自动生成针对性扩增场景,实现算法薄弱环节的定向覆盖。
- 对抗性场景生成技术:针对自动驾驶算法的失效模式,基于强化学习、贝叶斯优化等技术,自动化生成能够触发算法失效的对抗性场景,精准定位算法的边界与薄弱环节。该技术可在海量参数空间中快速搜索到算法失效的临界场景,解决传统随机采样场景效率低、覆盖度不足的问题,是L4级自动驾驶算法鲁棒性验证的核心技术。
- 标准化合规场景库体系:当前行业已形成完善的标准化场景库体系,核心包括Euro NCAP、C-NCAP等新车评价规程场景,ISO 34501、GB/T 39901等国家标准场景,以及ISO 21448预期功能安全场景库,覆盖了主流智驾功能的合规测试要求,是量产车型准入测试的核心依据。
3.3 云原生大规模闭环测试技术
随着高阶自动驾驶对场景覆盖度的要求不断提升,单机仿真已无法满足百万级、亿级场景的测试需求,云原生分布式仿真已成为当前行业的主流技术方案,核心特性包括:
- 分布式并行调度:基于Kubernetes等云原生容器编排技术,实现仿真任务的分布式部署与并行调度,可弹性扩展算力资源,同时支持百万级场景的并发测试,测试效率较单机仿真提升3-4个数量级,可在数小时内完成原本需要数月的全量回归测试。
- 与CI/CD流程深度融合:仿真平台可与GitLab、Jenkins等CI/CD工具无缝集成,实现算法代码提交、合并的自动化触发仿真测试,自动完成全量回归测试、合规性测试,输出量化测试报告与失效分析,实现算法迭代的全流程自动化,是当前自动驾驶算法研发的标准工程范式。
- 全流程数据闭环打通:云原生仿真平台可与数据湖、算法训练平台、实车数据平台深度打通,实现实车数据采集、场景提取、场景扩增、仿真测试、失效分析、算法训练、再测试的全流程自动化闭环,大幅提升数据利用效率与算法迭代速度。
- 影子模式仿真验证:基于云原生仿真平台,可实现实车影子模式数据的批量回放仿真,将实车采集的海量影子模式数据在仿真环境中批量回放,对比自动驾驶算法与人类驾驶员的行为差异,自动化定位算法潜在失效场景,在不影响实车安全的前提下完成算法的大规模验证。
3.4 仿真置信度量化与校准技术
仿真置信度是仿真测试结果有效性的核心前提,是解决“仿真有效、实车失效”行业痛点的核心,也是近年来行业研究的重点方向,核心技术包括:
- 仿真置信度的分层量化体系:当前行业已形成统一的置信度量化框架,分为四个核心维度:① 场景置信度:仿真场景与真实场景的一致性;② 车辆动力学置信度:仿真车辆模型与实车动力学特性的一致性;③ 传感器仿真置信度:仿真传感器输出与实车传感器输出的一致性;④ 算法行为置信度:算法在仿真环境与实车环境中的行为一致性。
- 虚实比对量化校准技术:基于实车测试采集的真值数据,与仿真环境中相同场景下的输出数据进行精细化比对,量化仿真模型的误差,通过参数辨识、模型优化的方式,对车辆动力学模型、传感器模型、环境模型进行校准,缩小仿真与实车的误差。当前主流技术已实现传感器仿真的端到端校准,通过实车采集的海量数据,基于机器学习技术优化仿真模型参数,使仿真输出与实车输出的误差控制在5%以内。
- 仿真置信度的标准化验证:国际与国内已出台相关标准规范,如ISO 14229、GB/T 40429等,对仿真模型的验证方法、置信度评价指标做出明确规定;同时,第三方检测机构已建立完善的仿真平台置信度认证体系,只有通过认证的仿真平台,其测试结果才能用于量产车型的合规准入。
四、工程落地实践范式与行业标准体系
4.1 不同等级自动驾驶的仿真测试落地范式
- L2+级ADAS功能量产测试:核心目标是满足合规认证与功能安全要求,仿真测试重点是标准化合规场景的全覆盖,包括C-NCAP/Euro NCAP的AEB、ACC、LCC等功能测试场景,以及国标强制测试场景,核心采用MIL/SIL完成功能迭代测试,HIL完成硬件级合规验证,最终通过实车测试完成最终认证。
- L3级有条件自动驾驶量产测试:核心目标是满足预期功能安全与ODD边界全覆盖要求,仿真测试重点是ODD范围内的全场景覆盖,包括极端天气、复杂路况、高风险Corner Case的验证,核心采用云原生大规模并行仿真完成海量场景全量验证,同时通过数字孪生技术实现实车场景的泛化扩增,覆盖ODD全边界。
- L4级高度自动驾驶研发测试:核心目标是实现开放道路全场景的安全验证,99%以上的测试里程都通过仿真完成。核心采用数据闭环驱动的仿真测试范式,通过实车数据回流提取场景,自动化泛化扩增为海量测试用例,通过云端并行仿真完成算法全量验证,定位失效场景并优化算法,形成持续迭代的闭环,同时通过对抗性场景生成技术挖掘算法薄弱环节,提升算法鲁棒性。
4.2 核心行业标准体系
当前自动驾驶仿真测试已形成完善的国际与国内标准体系,是算法工程师必须掌握的核心规范,核心分为四大类:
- 场景描述与接口标准:核心是ASAM组织推出的OpenX系列标准,包括OpenDRIVE(路网描述标准)、OpenSCENARIO 2.0(动态场景描述标准)、OSI(开放仿真接口标准),是仿真场景构建、数据交互的核心通用规范。
- 功能安全标准:核心是ISO 26262《道路车辆 功能安全》与对应的国标GB/T 34590,规定了汽车电子电气系统的功能安全全生命周期要求,对仿真测试在硬件、软件验证中的应用做出明确规定,是量产车型必须满足的强制标准。
- 预期功能安全标准:核心是ISO 21448《道路车辆 预期功能安全》与对应的国标GB/T 41798,针对自动驾驶系统在复杂环境下的性能不足、场景覆盖不足导致的风险,规定了预期功能安全的全流程验证要求,明确了仿真测试的核心作用,是L2+及以上高阶智驾量产必须满足的核心标准。
- 仿真测试与评价标准:核心包括ISO 34501《道路车辆 自动驾驶系统测试场景》、GB/T 39901《乘用车自动紧急制动系统(AEB)性能要求和试验方法》、GB/T 40429《汽车驾驶自动化分级》等,规定了自动驾驶系统的测试场景、评价指标、测试方法,是仿真测试体系构建的核心依据。
五、行业核心挑战与未来发展方向
5.1 当前核心挑战
- 高保真仿真与算力开销的矛盾:仿真保真度越高,对算力的要求就越高,尤其是实时光线追踪、物理级传感器仿真、城市级大规模交通流仿真,需要极高的算力支撑,如何在保真度与算力开销之间找到平衡,是当前行业面临的核心工程挑战。
- 复杂交互场景的行为仿真真实性不足:当前交通参与者的行为仿真大多基于规则模型或简单统计模型,难以复现真实世界中人类驾驶员、行人、非机动车之间的复杂博弈行为,尤其是国内城市道路中的加塞、鬼探头等强交互场景,仿真行为真实性不足,导致测试有效性下降。
- 极端场景下的仿真置信度难以保障:在雨、雪、雾、强光等极端天气,以及城市峡谷、隧道等极端环境下,传感器的物理特性极为复杂,仿真模型难以精准复现实车的真实表现,导致极端场景下的仿真置信度不足,无法有效验证算法的鲁棒性。
- ODD边界的穷尽覆盖难题:L4级自动驾驶的ODD范围极为宽泛,场景参数空间是无限的,如何通过有限的仿真测试用例,实现ODD全边界的有效覆盖,证明算法的安全性,是当前高阶自动驾驶落地面临的核心理论与工程难题。
结论
自动驾驶仿真测试已成为高阶自动驾驶技术研发、量产落地、合规认证的核心基础设施,随着数字孪生、大模型、云原生等技术的快速发展,仿真测试技术体系已完成了从传统单机验证到数据闭环驱动的智能化、大规模、高保真仿真体系的根本性升级。对于自动驾驶算法工程师而言,掌握仿真测试的核心技术体系、工程落地范式与行业标准,已成为必备的核心能力。未来,随着大模型与数字孪生技术的持续突破,自动驾驶仿真测试将向更高保真度、更高置信度、更大规模、更全流程智能化的方向发展,成为高阶自动驾驶全面商业化落地的核心支撑。
CI/CD = 持续集成(Continuous Integration)+ 持续交付/持续部署(Continuous Delivery/Deployment)核心目标:自动化构建、测试、发布,减少人工,快速、稳定上线。
一、核心概念
CI 持续集成开发者频繁提交代码到主干,每次提交都自动:
- 单元测试/代码扫描 尽早发现 Bug,避免集成灾难。
CD 持续交付在 CI 基础上,自动把代码打包、部署到测试环境,随时可手动发布到生产。
CD 持续部署更进一步:通过所有校验后,自动部署到生产环境(无人值守)。
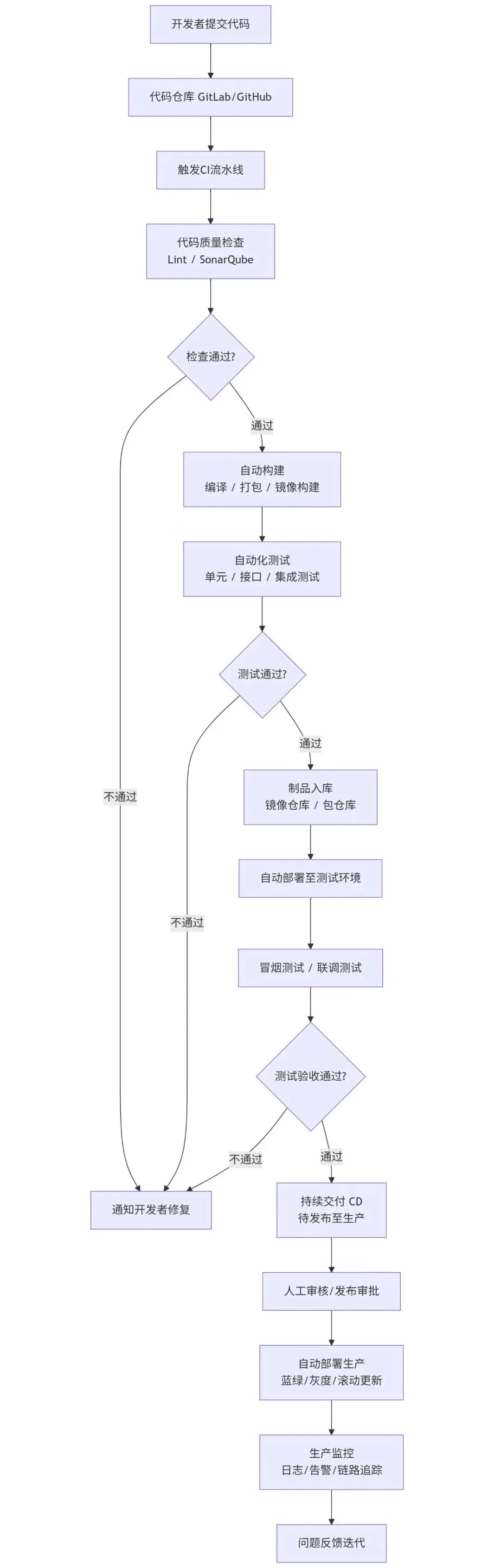
二、标准 CI/CD 完整流程
1. 代码提交
- 开发者本地开发、提交代码到 Git(GitLab/GitHub/Gitee)
2. 代码检查
- 代码规范校验(ESLint、Pylint、SonarQube)
3. 自动构建
- 编译、打包(Maven/Gradle/NPM/Go build)
- 推送到镜像仓库(Harbor、Docker Hub)
4. 自动化测试
- 性能/安全测试(可选) 任何一步失败,流水线终止并通知开发者。
5. 部署到测试环境
6. 人工审核/灰度(持续交付)
7. 部署到生产(持续部署)
8. 监控与反馈
三、常用工具链
- CI 工具:Jenkins、GitLab CI、GitHub Actions、Tekton
- 测试:JUnit、Postman、JMeter、Selenium
四、一句话总结
CI 保证代码合入没问题,CD 保证代码能快速、安全上线。整个流程从提交到上线高度自动化,实现小步快跑、快速迭代、高质量交付。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
