景鹏教授课题组在人机交互领域国际期刊《International Journal of Human-Computer Interaction》发表最新研究成果:When Automated Vehicles Encounter Vulnerable Road User Groups: From Stated Preference Surveys to Real-World Experiments。
期刊名称:International Journal of Human-Computer Interaction
检索类型:SCI、SSCI
影响因子:4.9 (2025)
期刊分区:JCR Q1
期刊主题:涵盖人机交互的广泛领域,包括用户体验、交互设计、新兴技术的社会影响等。
1. 安全新挑战:随着自动驾驶汽车(AVs)在城市交通中加速部署,其与行人、骑行者等弱势道路使用者(VRUs)的成为新的安全挑战。现有研究多聚焦于单个VRU,然而,真实交通中存在多样化的VRU类型(如行人、自行车、电动自行车骑手)和变化的群体规模,这使得交互场景极为复杂。
2.研究空白:当前对VRU群体与AV交互的研究存在明显不足:一是过于简化群体构成,大多只考虑同质行人群体;二是缺乏对群体内个体心理层面差异的关注;三是研究方法上,常依赖单一的陈述偏好调查(SP),其结果与真实行为之间存在“意图-行为差距”,结论的生态效度存疑。
3. 核心问题:群体行为线索(如周围同伴的类型、数量、行为)如何影响个体的过街决策?个体的心理特征和背景属性在其中扮演什么角色?人们的口头报告决策与实际行为究竟有多大差异?
为回答这些问题,本研究创新性地将陈述偏好调查与真实世界实验相结合,在相同的群体交互场景下,同步收集参与者的自我报告决策和实际观测行为,旨在揭示群体交互的动态机制并量化研究方法带来的偏差。
1. 模糊集定性比较分析(fsQCA)
该方法是一种定性的、基于集合论的分析方法。它不关注单个变量的净效应,而是致力于识别导致特定结果的前因条件组合或配置。其核心优势在于处理“多因并发”的因果复杂性,能揭示通往同一结果的多种可能路径,并承认因果不对称性。fsQCA特别适用于中小样本研究,能提供关于“哪些因素在何种情境下共同作用”的深刻、定性的组态性解释。
2. 随机效应Logit(RE Logit)
该方法是一种定量、基于面板数据的离散选择模型,专门用于分析同一个体在不同情境下的重复选择数据。其核心是通过为每个个体引入随机截距,来捕捉那些未被观测到但保持稳定的个体异质性,从而在控制这种个体特质后,更纯净地估计可观测情境变量对选择概率的净影响。它擅长处理数据中的聚类结构,适用于需要精确量化变量影响、并控制未观测个体差异的重复测量研究场景。
3. 综合选择与潜变量模型(ICLV)
该方法是一种高级的混合建模框架,它创新性地将结构方程模型与离散选择模型整合在一个统一的估计框架中。其核心目标是弥合心理学与可观测行为之间的鸿沟,正式地将不可直接测量的心理潜变量(如态度、感知风险、主观规范)作为解释变量纳入行为选择模型。ICLV包含两部分:一是“潜变量模型”,用于描述心理特质如何被个体特征影响并通过问卷指标测量;二是“离散选择模型”,其中估计出的潜变量与情境变量共同影响决策效用。该方法的强大之处在于能揭示驱动行为决策的内部心理机制,纠正传统模型中因忽略心理变量测量误差而导致的估计偏差,从而为理解复杂、主观的决策过程提供深刻的机制性解释。
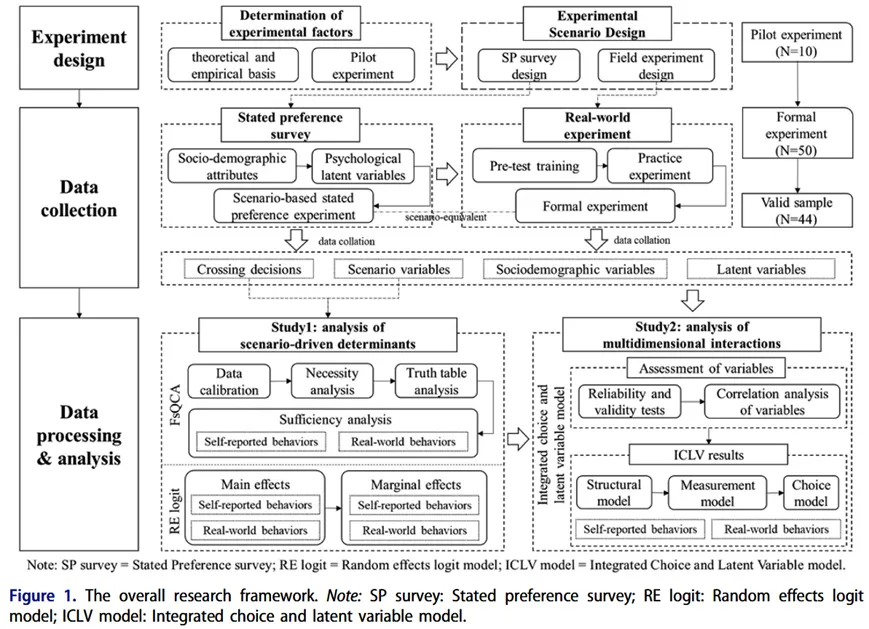
本研究框架包括实验设计、数据收集、数据处理与分析三部分。研究首先通过文献综述和小规模预实验确定关键实验变量,然后同期开展SP调查和实车实验,最后运用fsQCA、面板Logit模型和整合选择潜变量模型(ICLV)进行多层次数据分析。
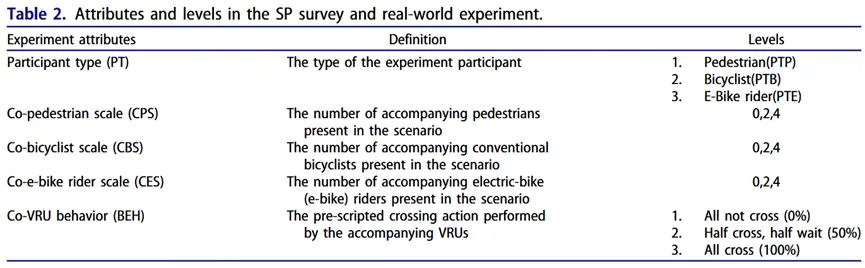
研究控制了三类群体行为线索作为自变量:参与者类型(行人、自行车骑手、电动自行车骑手)、同行VRU规模(0、2、4人)及其过街行为(全部不过、一半过一半等、全部过)。
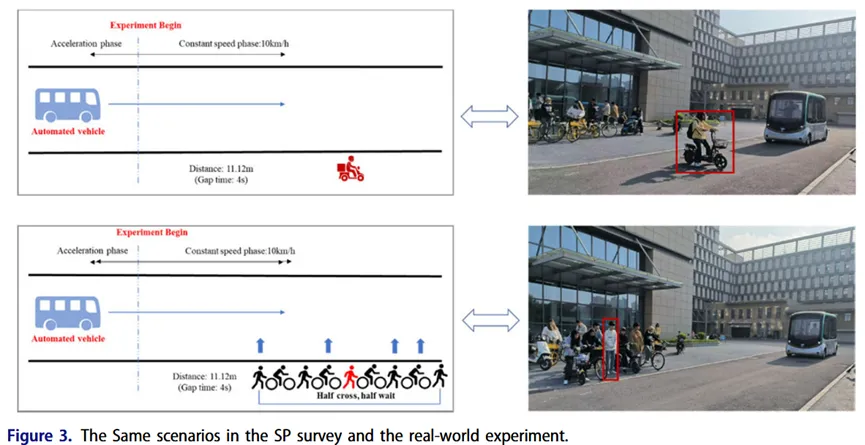
SP调查以图片问卷形式,让参与者在15个随机呈现的场景图片中做出“过”或“不过”的选择。真实世界实验在一周后于江苏大学封闭路段进行,使用L4级自动驾驶小巴,在严格控制的物理环境中复现与SP调查完全相同的15种交互场景,记录参与者的真实行为。
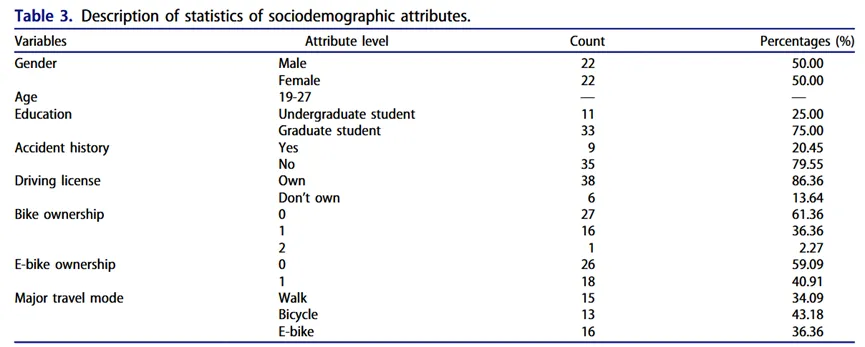
研究共招募50名参与者,最终44人(平均年龄22.84岁,均为具备自行车和电瓶车骑行能力的学生)完成了全部SP调查和实车实验。实验前收集了参与者的社会人口学属性,并通过基于计划行为理论(TPB)的量表测量了其态度、主观规范和感知行为控制等心理潜变量。
研究首先将陈述偏好调查收集的自我报告数据与真实世界实验记录的观测行为数据进行匹配与整合,形成了包含场景变量、个体变量、心理潜变量及两类决策结果(陈述vs实际)的最终数据集。
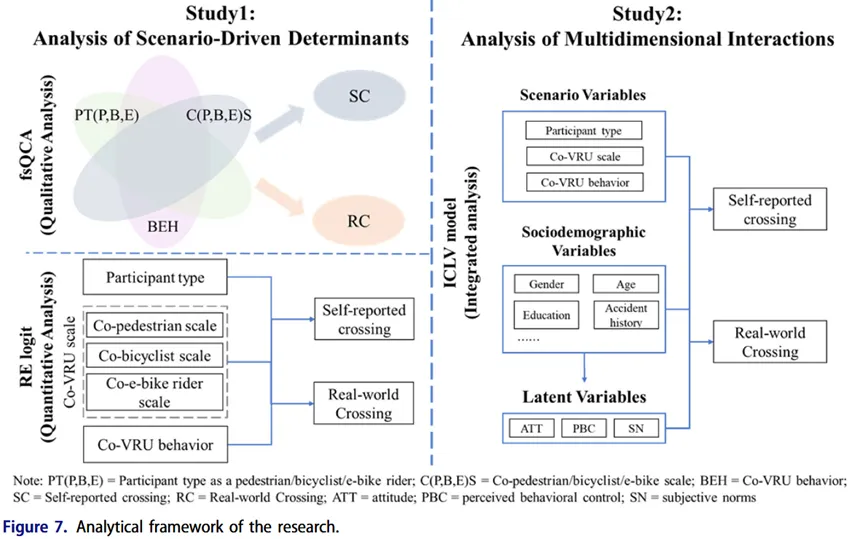
随后,分析分为两个连贯的子研究展开:
Study 1聚焦于回答群体行为线索的影响,为此并行运用了fsQCA与随机效应Logit模型——前者(fsQCA)从定性、组态的角度识别导致特定过街决策的充分条件组合,后者(RE Logit)则从定量、变量的角度,在控制个体未观测异质性的基础上,精确估计各情境因素对过街概率的净效应。
Study 2则在Study1的基础上,进一步引入个体的社会人口学属性与心理潜变量,采用ICLV模型,以探究这些内部特质如何与外部情境交互、并最终影响决策,从而揭示行为背后的心理机制。
1. 群体行为存在显著“从众效应”,但影响力因类型而异:在自动驾驶的背景下,无论是自我报告还是实际行为,周围同伴(尤其是行人)的过街行为都对个体决策产生强烈的正向影响。然而,电动自行车骑手群体的示范效应在实际行为中不显著,表明他们更独立或更少关注同伴行为。
2. 参与者类型决策模式迥异:相比行人,自行车和电动自行车骑手在与自动驾驶交互时,实际过街表现出显著更高的冒险倾向。fsQCA分析进一步揭示,电动自行车骑手在某些场景下(如独自一人时)过街意愿最高,而行人在大规模同伴都等待时,不过街的意愿最强。
3. 群体规模放大社会影响:更大的同伴群体规模会显著增加个体跟随过街的可能性。面板Logit模型结果显示,这种影响在行人和自行车骑手中尤为明显。
4. 意图与行为存在可测量的差距:对比SP调查和实车实验数据发现,自我报告的决策比真实行为更为保守和集中。例如,电动自行车骑手在问卷中更倾向于报告“等待”,但在实际道路中“通过”的比例更高。这验证了“意图-行为差距”的存在,警示我们仅依赖问卷数据来预测VRU行为或设计AV算法可能存在风险。
论文链接:
https://www.tandfonline.com/doi/full/10.1080/10447318.2026.2629520
引用格式:
Jing, P., Cheng, Y., Wang, D., Yao, Y., Xu, X., Jiang, L., & Ren, J. (2026). When Automated Vehicles Encounter Vulnerable Road User Groups: From Stated Preference Surveys to Real-World Experiments. International Journal of Human–Computer Interaction, 1–37. https://doi.org/10.1080/10447318.2026.2629520
景鹏,江苏大学,汽车与交通工程学院,教授、博士生导师。主要从事智能网联交通系统规划、交通仿真与分析、出行行为分析理论与方法等方向的研究。
程越,江苏大学,汽车与交通工程学院,交通运输专业2023级在读硕士研究生,研究方向为自动驾驶人机交互。
汪道歌,江苏大学汽车与交通工程学院讲师,同济大学工学博士。研究方向包括出行行为建模、交通多智能体仿真、共享交通等。
姚雨森,江苏大学,汽车与交通工程学院,交通运输专业2023级在读硕士研究生,研究方向为自动驾驶人机交互。
许翔宇,江苏大学,汽车与交通工程学院,交通运输专业2024级在读硕士研究生,研究方向为辅助驾驶和驾驶能力测量。
姜乐炜,江苏大学,汽车与交通工程学院,交通运输专业2024级在读硕士研究生,研究方向为老年人的驾驶能力补偿。
任佳敏,江苏大学,汽车与交通工程学院,交通运输专业2024级在读硕士研究生,研究方向为老年人骑行能力测量。
撰写:程 越 汪道歌
编辑:任佳敏 王田田
审核:景 鹏 汪道歌


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
