本研究的核心在于通过虚实交互实现高效、高精度的车辆同步控制,主要包含以下三大创新点:
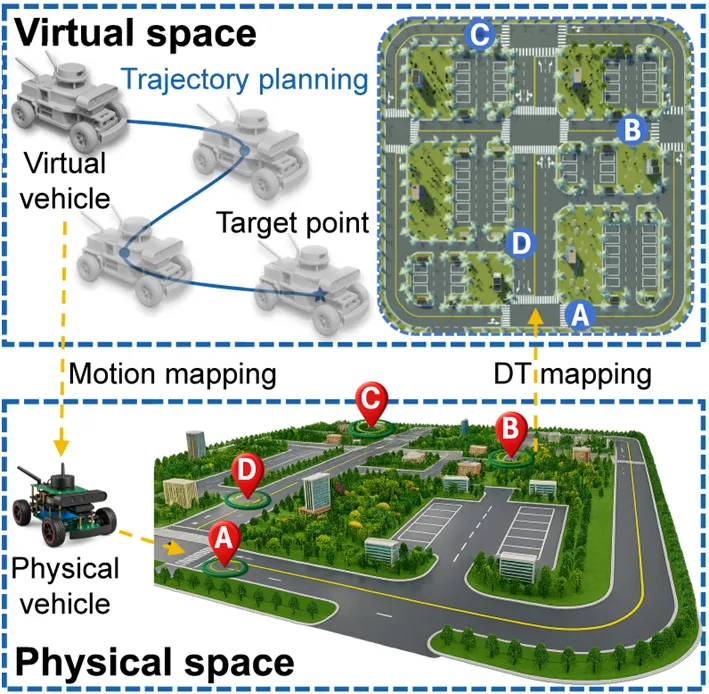
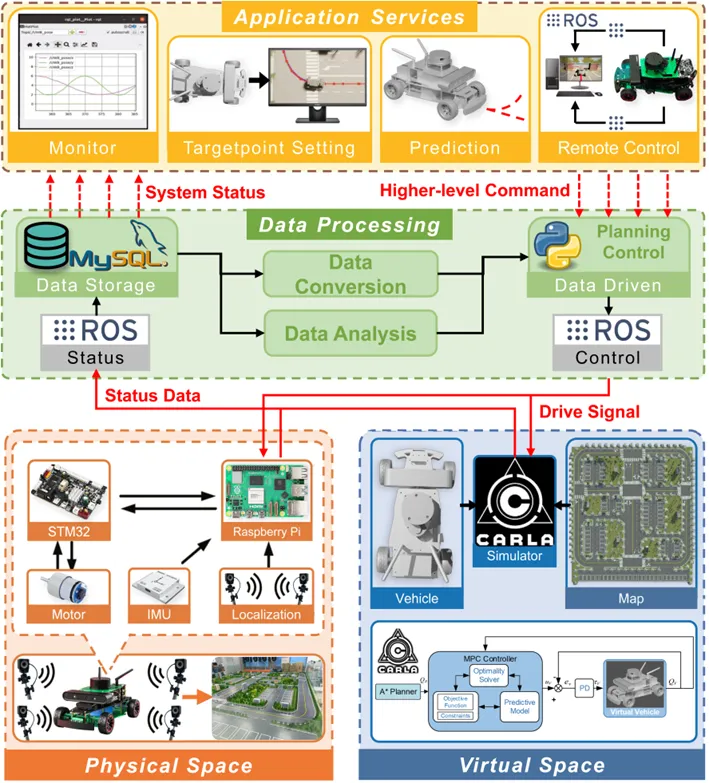
研究团队搭建了一个包含物理空间、虚拟空间、数据处理层和应用服务层的四层数字孪生架构,如图2所示。图2.数字孪生系统架构
虚拟空间基于CARLA仿真器和OpenDRIVE高精度地图构建,能够实现高保真度的动态场景仿真。物理空间则由真实的智能微缩交通沙盘和搭载底层控制器的物理车辆组成。两者通过ROS和无线网络进行实时的数据传输与状态同步。物理空间和虚拟空间如图3所示。
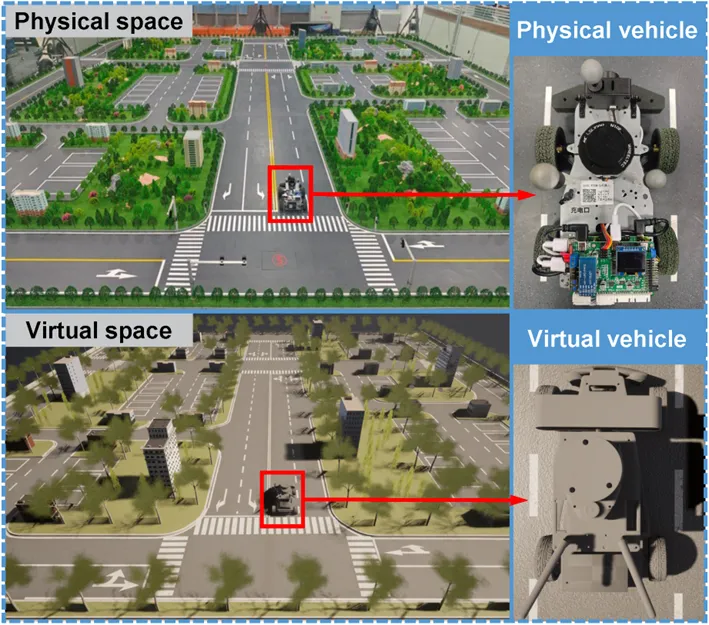
图3.物理空间与虚拟空间
2.虚拟空间:高精地图驱动的规划与模型预测
在虚拟空间中,研究人员改进了传统的A*算法,通过量化不同车辆行为(如直行、转弯、变道)的操作风险和距离,为路网边缘分配动态成本矩阵,从而在OpenDRIVE地图上快速生成兼顾几何路径与计算效率的全局最优路径。虚拟车辆利用模型预测控制(MPC)算法跟踪该全局路径,并在实时滚动优化中生成满足车辆运动学约束的参考轨迹以及前馈控制输入。车辆行为成本分配如图4所示。
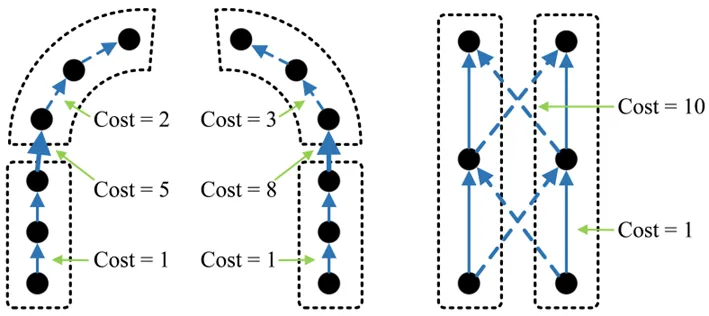
图4.车辆行为成本分配
3.物理空间:前馈-反馈与鲁棒抗扰控制
物理车辆无需进行复杂的MPC求解,而是直接接收来自虚拟车辆的参考轨迹和前馈控制输入,通过设计的反步控制器结合前馈信息,物理车辆能够精准跟踪虚拟车辆的目标位置,确保虚实同步。针对物理真实世界中存在的未知摩擦和侧滑等干扰,底层控制引入了非线性扩展状态观测器(ESO)和有限时间滑模控制器(SMC),利用ESO实时估计外部干扰,SMC则保障速度跟踪的快速响应和鲁棒性,控制策略框图如图5所示。
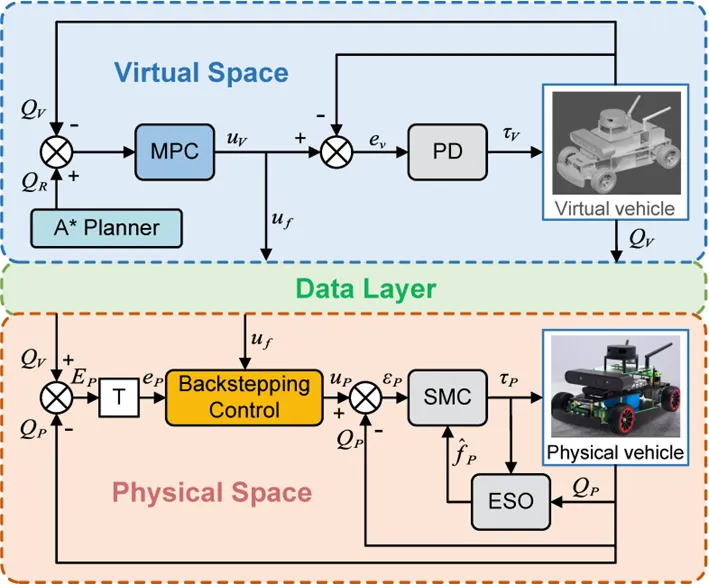
图5.前馈-反馈控制策略框图


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
