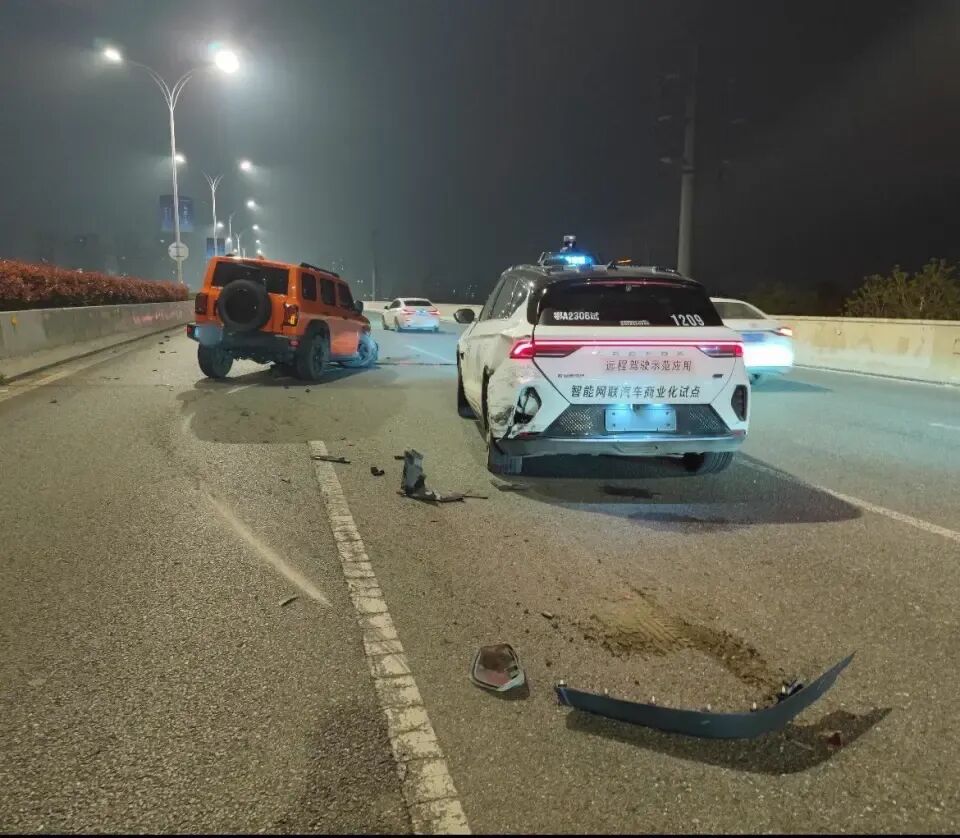
3月31日晚,武汉上百辆萝卜快跑自动驾驶汽车集体“趴窝”,三环线及高架路段交通瘫痪数小时。无独有偶,2025年12月旧金山Waymo无人车因停电导致信号灯失效,同样陷入“呆滞”状态。这些事件暴露出一个残酷现实:L4级自动驾驶的“云端依赖症”,正在成为城市交通的定时炸弹。云端依赖:L4的“致命软肋”
L4级自动驾驶的核心逻辑是“单车智能+云端接管”。车辆通过激光雷达、摄像头等传感器实时采集数据,本地计算单元处理基础信息,而复杂决策依赖云端AI大脑。这种架构在理想环境下能实现高效运行,但一旦网络中断或云端故障,车辆将瞬间失去“大脑”。
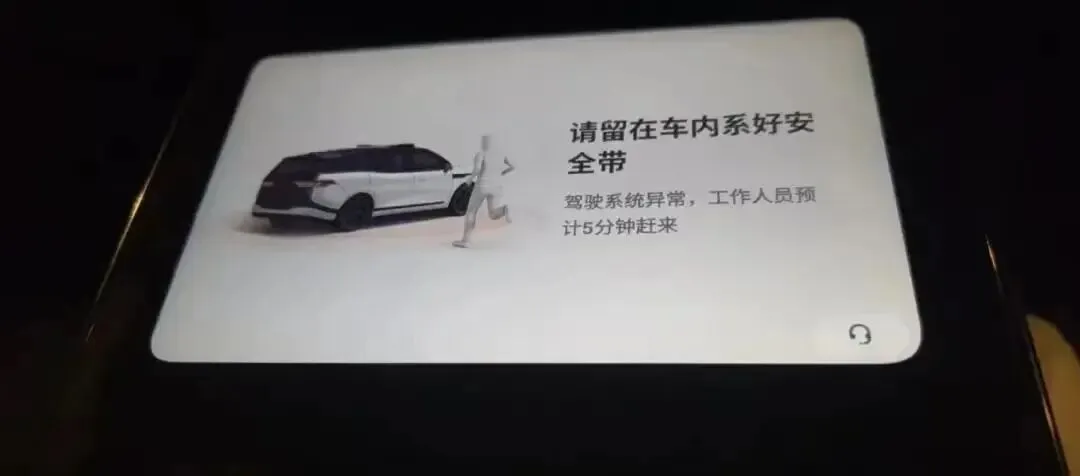
以武汉事件为例,初步调查显示,系统因触发“最小风险策略”集体停车。这一策略本是安全设计——当车辆无法判断环境时,自动停车以避免事故。但在开放道路中,上百辆车同时“罢工”,反而制造了更大的安全隐患。
相比之下,L2级辅助驾驶(如特斯拉Autopilot、小鹏NGP)采用“本地算力为主”架构。其传感器数据全部在本地处理,即使断网,车道保持、自适应巡航等基础功能仍可运行。这种设计虽无法实现完全自动驾驶,但在极端场景下反而更可靠。
冗余缺失:L4的“安全假面”
L4级自动驾驶常被宣传为“十重安全冗余”,但武汉事件暴露了其致命缺陷:冗余设计仅覆盖硬件层面,却忽视了系统级韧性。
- 通信冗余:单薄脆弱难保障多数L4车辆依赖单一网络通道(如4G/5G),一旦基站故障或信号遮挡,云端指令无法下达,本地系统又缺乏自主决策能力,只能被动停车。
- 决策冗余:单一策略存隐患L4系统通常将“停车”作为唯一故障响应策略,缺乏动态风险评估。例如,在高速路上突然停车可能引发追尾,而靠边停车或减速缓行可能是更优解。
- 运维冗余:响应滞后效率低武汉事件中,乘客被困高架数小时,暴露了远程运维的响应延迟。当前L4运营方多依赖人工接管,但面对大规模故障时,人力调度效率远低于需求。
反观L2系统,其冗余设计更贴近实际场景。例如,特斯拉采用双计算单元架构,主系统故障时可自动切换备用系统;小鹏通过本地算法库,在断网时仍能识别红绿灯和行人。这些设计虽不完美,但至少避免了“全军覆没”的风险。
破局之策:L4的“韧性进阶”
武汉事件标志着L4级自动驾驶进入“可靠性深水区”。未来,自动驾驶行业还需要从三个维度突破:
- 强化本地:决策自主增底气减少对云端的依赖,赋予车辆在断网时的自主决策权。例如,通过边缘计算实现实时路径规划,或预设多种故障响应策略(如靠边停车、减速缓行)。
- 构建冗余:通信多元保畅通采用5G+V2X+卫星通信的多模架构,确保在任何场景下都能保持最低限度通信。
- 完善应急:调度协同护出行建立“车-路-云”协同的运维平台,当车辆故障时,路侧单元可引导其靠边,或调度附近车辆协助救援。
自动驾驶的终极目标不是“炫技”,而是“安全抵达”。L4级技术若想真正落地,必须摆脱对云端的“婴儿式依赖”,学会在断网时也能“蹒跚前行”。毕竟,乘客需要的不是一台“完美机器”,而是一辆在故障时仍能守护生命的交通工具。
下一次,当你在路上看到一辆自动驾驶汽车突然停车,请别急着抱怨——它可能正在用“瘫痪”的方式,提醒我们:技术进步的道路上,安全永远没有终点。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
