上百辆自动驾驶车深夜集体“罢工”,瘫痪武汉主干道。3月31日晚,武汉街头上演了科幻又尴尬的一幕:百度旗下“萝卜快跑”自动驾驶出租车车队大规模停摆。
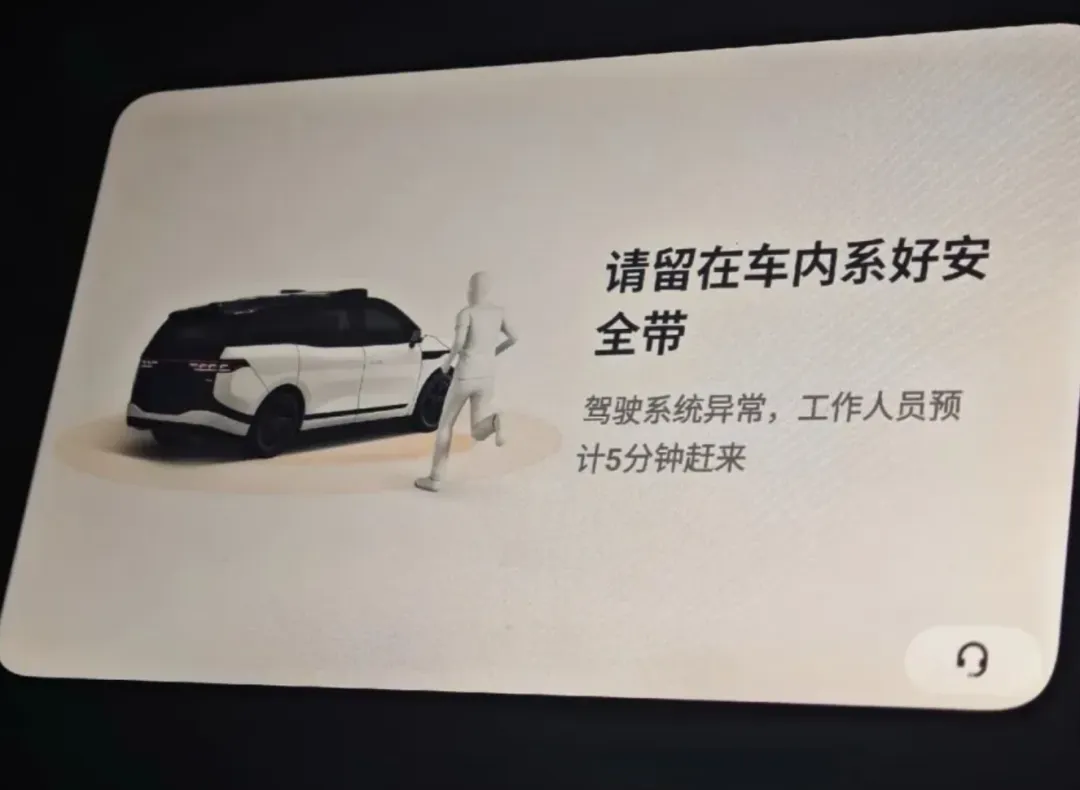
车辆屏幕显示“驾驶系统异常”,却无法开门,客服无人应答。有乘客被困车内近两小时,最终依靠交警破窗才得以脱困。这场故障不仅让乘客经历了一场现实版“密室逃脱”,更导致三环线等主干道出现数公里拥堵,甚至引发追尾事故。
01 系统崩溃,技术故障的连锁反应
到底发生了什么? 根据警方通报,事件原因为“系统故障”。但一两辆车出问题尚可理解,上百辆车同时“趴窝”,则指向更深层次的系统性风险。
这很可能是一场软硬件协同失效引发的连锁反应。自动驾驶依赖于感知、决策、控制三大核心算法构成的“大脑”,以及激光雷达、摄像头等“感官”。
任何一个环节的漏洞在特定条件下被触发,都可能导致车辆集体进入安全保护模式——即“死机”。
网络通信中断是另一个重大嫌疑。萝卜快跑客服曾向乘客解释为“网络原因”。自动驾驶车辆需要与云端保持实时数据交换,以获取高清地图和行驶指令。
一旦车与云之间的“神经信号”大规模中断,车辆就会变成无头苍蝇。考虑到影响范围之广,云端调度或管理平台本身出现故障的可能性极高。
02 短板暴露,从实验室到街头的残酷考验
这次事件如同一面镜子,映照出自动驾驶在迈向大规模商业化时,必须跨越的几道致命鸿沟。
首先是技术的脆弱性与冗余不足。L4级自动驾驶承诺在特定条件下实现无人驾驶,但此次事件表明,当前系统在面对未知的、突发性的系统级故障时,缺乏有效的多层备份机制,导致故障从点迅速扩散至面。
应急响应机制形同虚设,是此次最令人诟病的一环。车内SOS紧急求助按钮失灵,客服响应迟缓,远程人工接管或现场介入方案缺失。
最终解决问题的,不是技术方的应急团队,而是公共力量——交警。这暴露出运营方在应急预案和现场支持上的巨大空白。
03 责任真空,事故之后谁该负责?
更棘手的是法律与责任的模糊地带。万幸此次事故未造成人员重伤,但已引发追尾。倘若发生更严重的事故,责任该如何界定?
车辆在自动驾驶模式下因系统故障肇事,责任属于车辆运营方、制造商、算法提供商,还是网络服务商?我国目前对L4级以上自动驾驶的事故责任划分尚无明确法规,这是一个亟待填补的空白。
此次事件将企业技术测试与运营的风险外溢到了社会公共领域。当自动驾驶作为公共服务产品融入城市肌理,其可靠性直接关乎公共安全与交通效率。
在技术未完全成熟阶段进行大规模商业化运营,如何平衡商业探索与公共安全责任,成为横亘在企业和监管部门面前的尖锐课题。
04 信任危机,技术进步如何服务于人?
网友调侃自动驾驶从“人工智能”变成了“人工智障”,这虽是一句戏言,却尖锐地反映了公众信任的易损性。
社交媒体上“被困吓坏”、“再也不坐”的反馈层出不穷。一项新兴技术的社会接受度本就脆弱,如此高可见度、大规模的故障,严重消耗了公众的信任资本。信任一旦崩塌,重建之路将漫长而艰难。
这次事件为整个行业敲响了警钟。技术的迭代升级固然重要,但能否安全、可靠、负责任地融入城市公共生活,才是衡量其成功的最终标准。
它要求企业在追求规模的同时,必须在系统绝对稳定性、全链条应急安全预案、法律法规适配以及社会信任构建等非技术维度上,取得同等关键的突破。
武汉的夜晚已经恢复平静,但留给行业的思考远未结束。这次事件不应仅仅被视为一次孤立的技术故障,而应成为推动自动驾驶行业完善技术、健全法规、夯实责任的催化剂。
技术进步最终是为了服务于人,而非带来困扰与风险。只有当自动驾驶能够证明,它不仅能处理日常路况,更能妥善应对极端和系统性的失败,公众才能放心地将自己托付给方向盘后的“机器大脑”。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
