曾几何时,我们被无数科技大佬描绘过这样一个充满想象的未来清晨:你从容坐进车内,无需触碰方向盘,只需轻声说出目的地,便能安心喝咖啡、看报纸,甚至闭目补觉,车子会如同经验老道的“老司机”一般,在早高峰的车流中自如穿梭、平稳前行。
早在2016年,诸多车企巨头就曾公开做出预言,称到2020年,L5级全自动驾驶汽车将大规模上路,彻底改变人们的出行方式。然而,现实远比想象残酷,在当下的科技发展路径下,想要实现全场景、全天候的真正无人驾驶,几乎是一个“不可能完成的任务”。
在自动驾驶行业内,流传着一个广为人知的说法:完成90%的自动驾驶基础功能,仅需要耗费10%的时间;可想要解决剩下那10%的核心难题,却要投入90%甚至无限多的时间,这就是行业公认的长尾效应(Long-tail Problem),也是自动驾驶绕不开的核心瓶颈。
对于人工智能而言,学习识别红绿灯、保持车道行驶、安全跟车等基础操作,属于极为简单的任务,因为这些场景都在交通规则框架内,是日常出行中高频发生的“常态场景”。但现实中的道路,从来不是规整有序的理想环境,而是充满混乱与随机性的复杂空间。
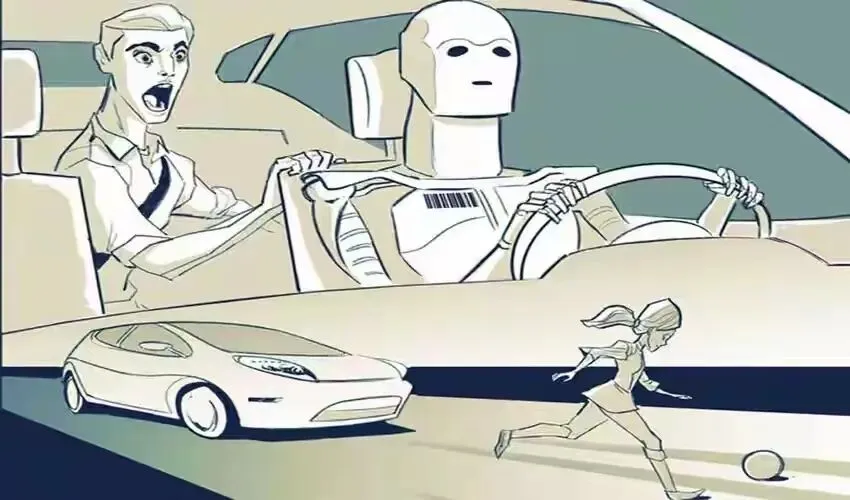
不妨想象这些突发状况:路边突然窜出一只追逐皮球的流浪猫;一辆违规逆行、车身满载纸箱的电瓶车穿梭而来;暴雨天气里,路面标线被积水淹没,光线反射紊乱导致识别失效;甚至前方行驶的货车,突然掉落一只奇形怪状的塑料桶。
这些被定义为**边缘场景(Edge Cases)**的特殊情况,在海量行驶数据中占比还不到1%,可对于自动驾驶汽车来说,每一个1%的突发状况,都是关乎行车安全的生死关头。根据加州交通管理局(DMV)历年发布的自动驾驶脱离报告数据显示,即便行业内头部领先企业,在面对这类极低概率的突发场景时,依旧需要安全员立刻进行人工介入,才能规避风险。
AI的运行逻辑建立在“概率”基础之上,当它遇到从未学习过、出现概率极低的全新场景时,极易陷入逻辑死锁,进而引发车辆突然刹停的“幽灵刹车”问题,甚至出现行驶判断失误,引发安全事故。
开车从来都不只是单纯的车辆物理位移,从本质上来说,开车是一种复杂的社交行为,这一点是AI难以复刻的核心所在。
人类司机在过马路、变道并线时,往往会与其他司机、行人进行眼神交流,对方一个点头、一个手势,或是车头微微晃动的幅度,就能快速判断出“对方会让行”“对方要强行插队”等行驶意图,这种基于人类直觉的行车博弈与默契,是目前人工智能无法逾越的技术鸿沟。
当下的自动驾驶汽车,只是严格的“规则追随者”,它会精准计算安全车距、恪守行驶规则,但在复杂的中国式立交桥、拥堵环岛路段,这种过于刻板的“守规矩”,反而会让车辆寸步难行。AI驾驶若是过于保守,会被后方车辆频繁鸣笛催促,甚至始终无法切入主路;若是过于激进,又无法承担对应的法律责任与安全风险。
更棘手的是,AI不具备人类的“心理模型”,它无法像人类一样预判突发行为:路边摇摇晃晃的醉汉下一步会向哪个方向倾倒?边玩手机边横穿马路的学生,是否注意到驶来的车辆?
机器可以精准计算车辆距离、行驶速度,却永远计算不出人心,这种社交互动能力的缺失,让无人驾驶车辆进入人流、车流密集的混行区域时,始终显得笨拙不堪,难以应对复杂路况。
目前全球自动驾驶主要分为两大技术派系:一类是以特斯拉为代表的纯视觉派,主张仅依靠摄像头就能实现全场景自动驾驶;另一类是以Waymo为核心的传感器融合派,通过车顶搭载昂贵的激光雷达,提升环境识别能力。
但令人遗憾的是,这两种技术路线,在极端天气面前都存在无法规避的“致命短板”。
纯视觉派最怕大雾、暴雨天气,当强降雨遮挡摄像头镜头,或是光线漫反射导致图像采集饱和,AI的“视觉眼睛”就如同被蒙上保鲜膜,彻底失去识别能力;激光雷达虽不受光线影响,依靠激光脉冲工作,可在大雪天气中,激光会打在雪花上发生折射,让车辆生成的环境地图布满“噪点”,在AI系统眼中,空气中会布满密密麻麻的障碍物,导致车辆不敢行驶。
除此之外,自动驾驶高度依赖高精地图运行,但城市道路建设日新月异,临时修路、道路改道成为常态,若云端地图更新速度跟不上现实道路变化,AI就会拿着过时的地图,在现实路况中陷入迷路困境,这种对外部基础设施的高度依赖,进一步压缩了全自动驾驶的发展空间。
想要处理自动驾驶产生的海量实时数据,车辆必须搭载一台“车载超级计算机”。一辆全功能自动驾驶汽车,每秒产生的数据量高达数GB,为了快速处理这些数据,车载计算平台的功耗十分惊人,这也与当下主流电动汽车形成了难以调和的矛盾。
如果追求极致算力以实现全自动驾驶,车载计算机会消耗大量电池电量,直接导致车辆续航里程大幅缩减。据行业相关数据显示,高性能自动驾驶计算平台的搭载,会让电动车续航里程缩减10%至15%,简单来说,为了实现车辆自动驾驶,付出的代价却是车辆续航能力下降,陷入技术与实用的两难境地。
除了层层技术壁垒,法律与伦理问题,才是自动驾驶想要实现全自动,最难翻越的高山。
行业内经典的“电车难题”始终无法破解:当交通事故无法避免时,AI应该选择避让行人、牺牲车内乘客,还是保护乘客、避让行人?这种涉及人类生命道德权重的判断,是由0和1组成的程序,永远无法给出标准答案的伦理难题。
更现实的是事故定责问题,若L5级全自动驾驶汽车发生交通事故,责任该由谁承担?是编写代码的算法工程师、生产传感器的硬件供应商,还是车内未操控车辆的车主?这一系列法律问题,至今没有明确的界定标准。
2024年工信部联合多部门发布的《关于开展智能网联汽车准入和上路通行试点工作的通知》中,仅对L3、L4级自动驾驶的上路准入展开探索,对于真正意义上的L5级完全自动驾驶,相关法律依旧保持极度审慎的态度。想要彻底取消方向盘,让人类完全交出驾驶控制权,相关法律关系的重构,需要数十年的时间逐步磨合完善。
面对技术、法律、伦理等多重难题,全球自动驾驶行业正迎来**“回归现实”的理性转型**,不少曾宣称要直接布局无人驾驶出租车的企业,纷纷转向研发L2+或L3级辅助驾驶,不再执着于“彻底取代司机”,而是聚焦高速路况减负、自动泊车等实用化功能,这种务实转型也有数据支撑:工信部2024年上半年数据显示,L2级组合驾驶辅助搭载率已大幅提升,人机共驾的折中方案,才是当下真正能实现量产、切实惠及用户的选择。
全自动驾驶的发展,从来不是一场短距离冲刺,而是一场终点未知的漫长马拉松。我们必须承认,人类驾驶是兼具灵性与社交直觉的复杂行为,当下的AI即便算力强大,也只是在固定规则下运行的“算力机器”,难以复刻人类驾驶的复杂逻辑与应变能力。
这并不代表自动驾驶没有未来,在矿山、港口、固定公交线路等封闭场景,无人驾驶早已落地应用,展现出巨大的应用价值。但在充满生活气息的城市街巷,面对摊贩占道、孩童乱跑等各类突发状况,想要彻底告别方向盘、实现真正的全自动驾驶,恐怕还需要几代人的技术探索与努力,司机这份职业,距离失业还早得很。