在武汉深夜的高架上,上百辆“萝卜快跑”集体停驶。这不是崩溃,而是一次精心设计的安全机制在履行职责。
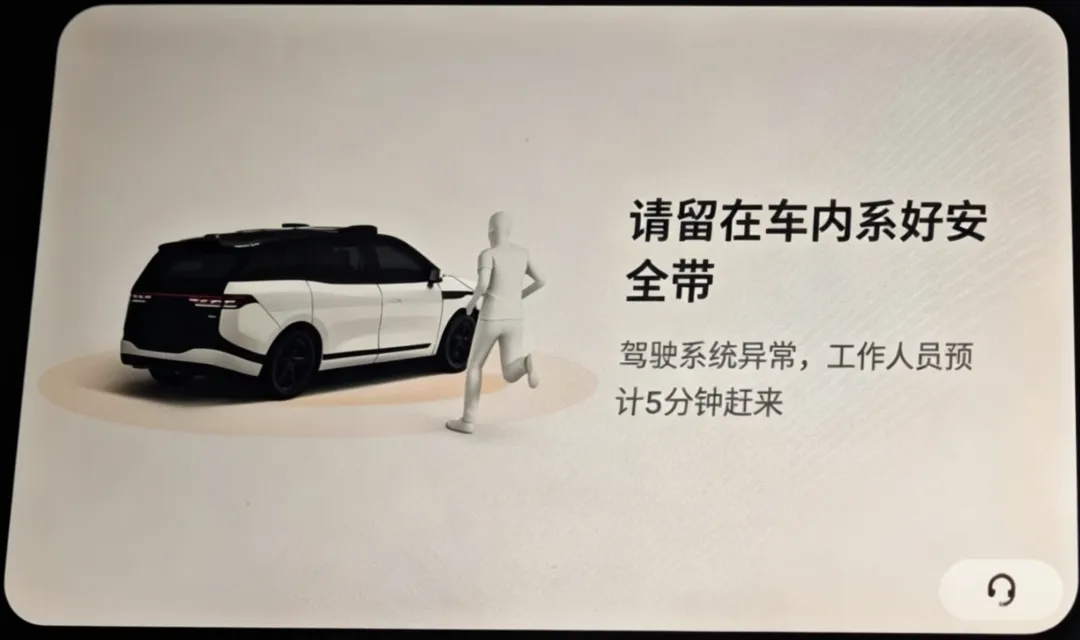
2026年3月31日晚上9点,武汉市民周女士坐进一辆萝卜快跑Robotaxi。车辆驶上三环线高架后,突然减速、打双闪、彻底停住。窗外车流呼啸,车内屏幕提示“驾驶系统异常,工作人员预计5分钟赶来”。她不知道的是,此刻武汉数十辆同款车正以同样的姿态同步停下——这座城市第一次经历了自动驾驶车队的“集体停摆”。
警方通报很快到来:初步判断为系统故障所致,无人员受伤。舆论场上,批评声四起——“僵尸车堵路”“安全神话破灭”“无人车成了移动路障”。
但如果换个角度看待这次“趴窝”,或许会发现另一重真相——这不是技术失败,而是安全机制的“正常工作”。
一、 “停下”是最高的安全指令
在自动驾驶的设计逻辑里,有一条铁律:在不确定面前,“停”永远优先于“行”。
此次事件大概率是自动驾驶系统在自检到潜在不确定性时,主动触发了“最小风险操纵”(Minimal Risk manoeuvre, MRM)。国际标准ISO 23793-1:2024将其定义为:当自动驾驶系统遇到无法处理的情况时,为保障安全而自动进入的一种稳定状态,表现为减速、开启双闪、原地停车。
这套机制的底层支撑是“安全冗余”设计,说白了就是“多备份”。萝卜快跑配备了感知三冗余、计算单元双冗余、高精度定位三冗余、执行系统冗余、电源冗余等多重备份。如同民航飞机配备多套发动机和飞控系统,自动驾驶车辆在设计之初就预设了“任何单一环节异常,都不能导致全系统失效”的原则。当主系统出现不确定性,备份系统或安全协议便会介入——如果备份也无法确认安全,车辆的终极指令就是“停下来”。
这不是技术“崩溃”,而是系统在告诉外界:我遇到了无法判断的情况,选择暂停以保护所有人。
二、云端依赖的“阿喀琉斯之踵”
然而,上百辆车几乎同时“停摆”,仅仅用“安全机制触发”来解释是不够的。这背后暴露出一个更深层的技术结构问题:云端依赖的单点风险。
如此多分散的车辆同时出现问题,大概率不是单车系统故障,而是云端或车路协同的核心系统出了差错。当前Robotaxi普遍采用“车云协同”方案,车辆在很大程度上依赖云端指令和实时数据传输。当云端调度或通信链路出现异常,车辆失去了“主心骨”,只能触发安全机制停下来。
这正是自动驾驶从“少量测试”走向“大规模运营”必须面对的难题:系统不仅要“聪明”,还要“抗造”,也就是要有足够的“韧性”。有专家就指出,如果企业不能在这种突发情况下,快速清理停驶车辆、恢复交通,监管部门可能会重新评估它们的运营资格。还有学者建议,监管机构应该出台相关标准,要求企业在扩大车队规模时,配备足够的备用通信方案和人工接管资源——不能车多了,应急能力没跟上。
说到底,未来自动驾驶行业的竞争,不只是比谁的技术更先进,更要比谁的系统更稳定、应急响应更及时。
三、从武汉到旧金山:同一个问题的相同选择
令人深思的是,此类事件并非萝卜快跑独有。
2025年12月,美国旧金山因变电站火灾导致大规模停电,交通信号灯大面积失效。数百台Waymo无人车因无法确认路口安全状态,在多处停滞开启双闪,同样造成了城市交通的严重拥堵。Waymo事后回应称,其系统预设:遇到失效的信号灯,就按“四向停车”(也就是所有方向车辆都停车让行)来处理,但这次停电规模太大,大量的人工远程确认请求,直接“挤爆”了后台,最终触发了最小风险策略——而这一策略,正是当地监管部门对L4级无人车的强制性安全要求。
从武汉到旧金山,两家行业龙头在短期内相继发生车辆停滞事件,本质上指向了同一个问题:当自动驾驶系统从测试场走向真实城市、从数十辆扩大到数百辆规模时,单车层面的“安全优先”逻辑,在规模化运营场景下可能转化为系统性的交通风险。
值得注意的对比是,两次事件中最终都守住了安全底线——无一人受伤。这恰恰印证了安全机制设计的有效性。Waymo和萝卜快跑的“停摆”,或许正是它们存在的意义:在不确定中优先选择“不做错”,而不是“做得快”。
四、“安全”与“效率”的再平衡
武汉事件发生后,舆论几乎一边倒地将其解读为“技术故障”。自动驾驶行业对此有一个专门的术语——“最小风险状态”(Minimal Risk Condition, MRC),普通人却很少知道。
这种认知落差是可以理解的。我们习惯了“有人驾驶”的范式:遇到问题,司机会判断、会应对、会靠边停车。而无人驾驶车辆没有驾驶员在关键时刻兜底,因此系统必须自己做出最保守的安全决策。这种决策在结果上表现为“停车”,在感知上就变成了“故障”。
专家指出,早期系统的冗余策略偏向保守,触发安全停驶的阈值较低。随着极端场景数据的积累、算法模型的完善,系统对风险的判断会更加精准,保守触发的情况会逐步减少。安全底线将贯穿技术演进的始终,但系统会变得越来越“聪明”。
全国政协委员、交通运输部科学研究院副院长兼总工程师王先进指出,当前我国自动驾驶已进入从试点示范向规模化应用过渡的关键期。他建议加快推动最小风险操作的强制性国家标准落地,参照ISO 23793-1:2024等国际标准,结合我国复杂的道路交通环境在实践中持续完善标准细节。
五、最后
3月31日晚的武汉,那些打着双闪停在路中央的萝卜快跑车辆,既是技术探索者在现实世界遇到的真实压力,也是一次被广泛误解的“安全宣言”。
自动驾驶行业的进步,从来不取决于它跑得有多快,而取决于它在不确定面前停得有多稳。中国信息协会常务理事、新经济研究院院长朱克力评价说,这种对“安全第一”的严格遵循,虽然表现为看似“异常”的停车,实则为公众信任自动驾驶奠定了基础。
未来的自动驾驶,不是消灭“停车”,而是让“停车”发生得更少、更聪明。从这个角度来说,“萝卜不跑”的那一刻,或许比它跑起来的所有时刻,都更值得被认真理解。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
