自动驾驶技术是交通领域重要的前沿技术,其发展对交通安全和效率具有变革性意义。轨迹规划作为自动驾驶的核心技术之一,直接决定了车辆在复杂动态环境中的行驶安全与舒适性。面对传统算法在高维复杂路网中的适应性不足、强化学习的安全性与样本效率瓶颈、模仿学习泛化能力有限等长期挑战,该综述首次系统性地从传统算法、强化学习、模仿学习三大维度,对自动驾驶轨迹规划领域的前沿成果进行了全面梳理、深入剖析与前瞻展望,为后续研究者提供了清晰的研究地图与重要参考。
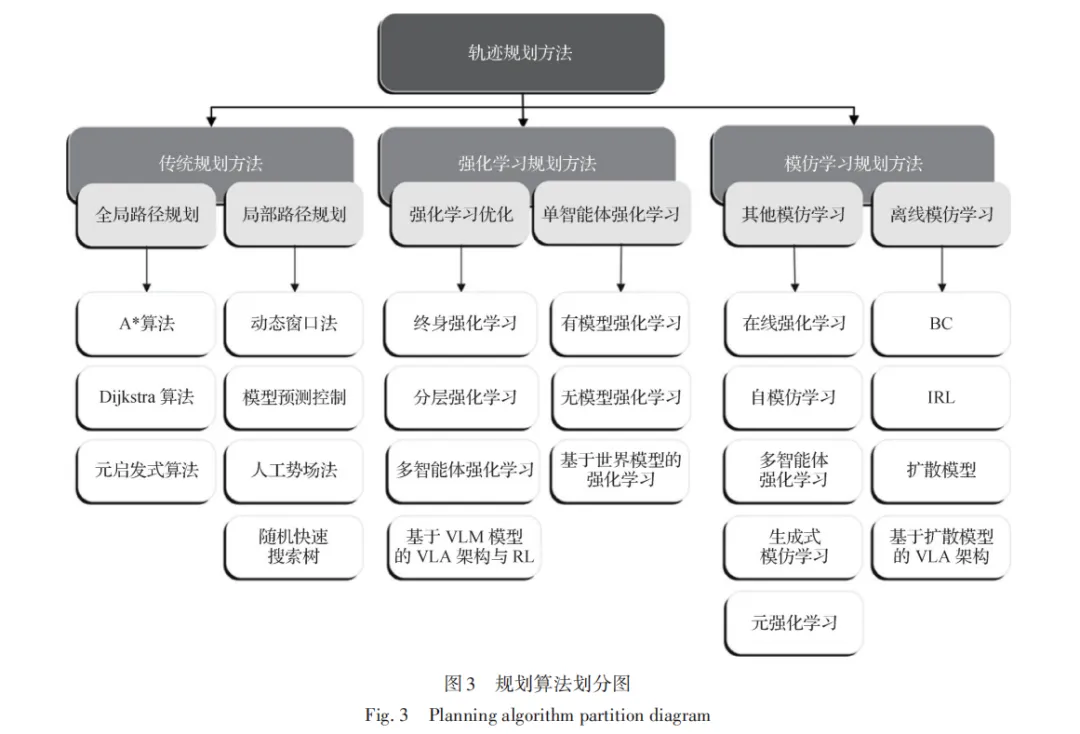
论文首先对比分析了目前主流的模块化架构与端到端架构两种自动驾驶框架,详细论述了轨迹规划在两种架构中的核心定位与优劣势。随后,重点梳理了图搜索(如A、Dijkstra)、人工势场法、静态/动态采样(如RRT)、元启发式算法(如遗传算法、蚁群算法)等传统规划算法的最新进展,并系统总结了全局-局部混合算法(如A*-DWA、Dijkstra-RRT、APF-RRT*等)的发展趋势,指出混合算法有效弥补了单一算法在动态环境下的局限性,为工程实践提供了可行路径。
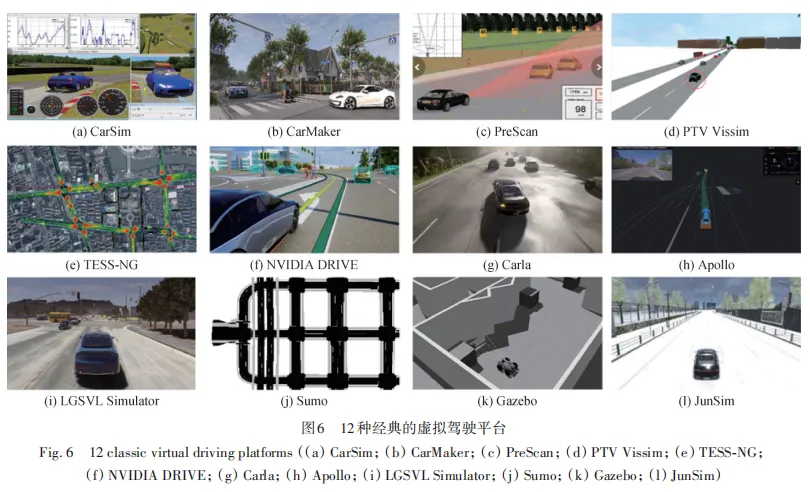
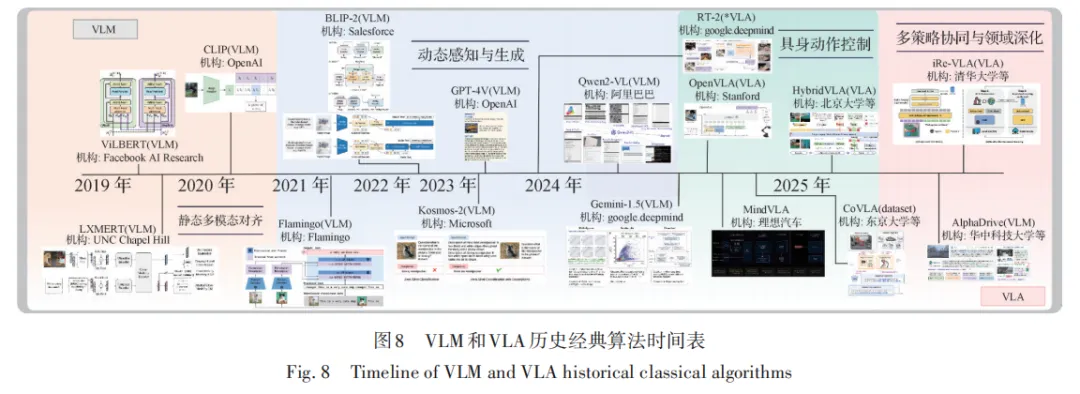
在强化学习部分,论文分类探讨了基于价值、基于策略和Actor-Critic三大类经典方法,针对安全性不足、样本效率低等核心痛点,系统总结了虚拟仿真驾驶平台、终身学习、分层学习、多智能体强化学习等典型解决方案。同时,创新性地引入了基于世界模型的强化学习最新进展,分析了其在复杂动态环境建模中的优势。在模仿学习方向,论文深入剖析了逆强化学习、行为克隆、生成式模仿学习等技术,并重点阐述了在线模仿、自模仿、元模仿以及当前热门的视觉语言动作模型(VLA)与扩散模型(DM)结合的创新路径,强调强化学习在VLA中的关键作用。
论文最后剖析了高质量自动驾驶面临的三大挑战:世界模型的“虚实迁移”痛点、VLA架构的“数据需求”瓶颈以及扩散模型的“算力瓶颈”,并结合最新研究为破解这些难题提供了方向性建议。全文凝练出自动驾驶轨迹规划领域的发展趋势——传统算法与学习方法深度融合、端到端框架与模块化架构优势互补、多模态大模型赋能——为我国自动驾驶技术从“能跑”迈向“跑得好、跑得安全”提供了理论支撑。
以下是论文中的部分插图:
该综述系统性地梳理了自动驾驶轨迹规划领域的前沿进展。为自动驾驶这一复杂领域提供了清晰而全面的技术图谱,为自动驾驶轨迹规划研究提供一个全面、清晰的路线图,其高度结构化的文献梳理方式不仅有助于学者快速把握领域全貌,更通过精准指出各技术路线的核心问题与解决方案,为后续研究提供了关键的问题导向与创新启发。该综述填补了国内自动驾驶轨迹规划领域系统性综述的空白,还首次将视觉语言模型、扩散模型与世界模型等前沿技术纳入轨迹规划框架,具有重要的理论创新价值和工程指导意义。充分体现了我校在人工智能与智能交通交叉领域的科研实力与创新积累。这篇综述推动传统算法与学习方法深度融合,助力我国自动驾驶技术实现从实验室到真实道路的跨越式发展。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
