摘要:汽车行业在生产电动化、网联化、自动驾驶车辆时面临诸多挑战。尽管从技术角度看这些挑战相互独立,但市场与监管机构要求同步开发并集成。
自动驾驶车辆的研发意味着要开发高可靠性系统,这是一项跨学科工作,涉及机器人技术、计算机科学、电气工程、机械工程、心理学、社会学与伦理学等多领域知识。
如今,许多高级驾驶辅助系统(ADAS)已投入使用,如紧急制动系统、车道保持辅助、自动泊车辅助等。新款豪华车已可在高速公路上自动驾驶或自动泊车,但最终目标是开发完全自动驾驶车辆,能够在任何场景下无需人类干预自主行驶。
车辆的自动驾驶程度越高,保持其可靠性的难度就越大。这加剧了开发流程层面的挑战,因为其异常行为可能导致灾难性后果;与过去不同,不再有人类驾驶员来缓解错误行为带来的影响。
可靠性面临的主要威胁来自三个方面:驾驶员误用、设计系统性错误、随机硬件失效。
本文针对各类安全威胁从多维度展开分析,重点研究与**功能安全(FuSa)**相关的威胁——即系统对外部环境及时、正确做出响应的能力。
从技术角度看,这些行为由电子电气部件实现。
提示:本文分为“一、二、三”共三部分,这是文章“第一部分”,将重点阐述ISO 26262框架下的部件开发流程。
在后续发布的文章“第二部分”中,我们将重点解析基于仿真的FMEDA方法研究成果。
而在后续发布的文章“第三部分”中,我们将基于仿真的HARA方法研究成果,并实时软件验证技术研究成果。
原文作者:Jacopo Sini
编译:猿东东,猿西西
20世纪70年代末,为满足节油需求与早期汽车污染管控法规,微控制器开始用于控制车辆功能,计算机化系统最早应用于发动机控制,尤其是汽油发动机点火系统。80年代,早期电子燃油喷射系统、自动变速箱控制、自适应悬架相继出现,逐步形成集成式动力总成控制方案。
90年代,体积更小、单位算力成本更低的计算系统快速普及,更多车辆功能从机械/机电方案转向微控制器控制,依托安全气囊、防抱死制动系统(ABS)、牵引力控制、电子稳定程序等技术提升安全性;同时舒适性配置开始普及,如电动车窗、电动座椅、巡航控制、自动空调、电子仪表、信息娱乐与导航系统等众多先进功能。
2005年前后,片上系统(SoC)的普及开启了智能手机时代,这类单芯片完整计算机系统凭借通用性、算力与极高灵活性,在汽车行业中实现了更复杂的功能。最初引入泊车雷达、环视摄像头等辅助驾驶配置,随后自适应巡航控制(ACC)逐步普及;近十年,基于雷达、激光雷达、计算机视觉的更高级ADAS快速发展,如自动紧急制动(AEB)、避撞与缓解、车道辅助系统等。
近十年,子系统集成化成为趋势,以应对汽车行业同时面临的三大挑战:
1. 电动化:集成电力驱动系统,作为唯一动力源或提升内燃机效率;
2. 自动驾驶;
3. 网联化:实现车与车、车与路侧基础设施、车与云端的通信,实现音乐流媒体、导航交通信息更新,更重要的是支持嵌入式软件远程升级,尤其基于机器学习的软件组件。
图1.1:Cypress PSoC 5片上系统(SoC)的艺术化呈现
1.0.1 软件:机遇与问题
车载计算机系统带来了丰富的功能优势,但也存在隐患:用软件可编程逻辑替代物理过程或机械连接,可能引入可靠性问题,导致系统异常。这类问题在任务关键场景会造成巨额经济损失,在安全关键场景则可能引发事故,危及人员安全与环境。
为规避此类风险,需引入功能安全理念——从功能维度定义的安全观。功能安全并非汽车行业首创,其起源于60年代核工业、国防、航空航天行业计算机化系统普及后的安全需求。
汽车行业软件复杂度
某高端车企发布的文章显示,其车载嵌入式软件包含约1亿行高级语言代码,其中约1000万行为条件判断语句,分布在约300万个函数中,函数调用点达3000 万个;软件部署在超过120个电子控制单元(ECU)上,管理约7000路外部信号。
即便部分复杂度源于软件架构(如遗留代码复用、第三方组件),也无法大幅降低。
解决这类复杂度带来的可靠性问题,需通过严格开发流程保证软件质量:
· 遵循MISRA等规范,保证代码统一性、可读性,避免因平台相关指令引发未定义行为;
· 借助静态分析工具强制落地上述要求;
· AUTOSAR标准从高层抽象层面简化复杂度,统一软件组件接口;
· 基于模型的软件设计(MBSD)在保证质量无缺陷的前提下加速开发,同时模型可直接作为代码文档,实现平台无关的软件单元实现,简化测试工作。
1.1 车辆安全与驾驶功能自动化行业趋势
近年来,自动驾驶赛道竞争持续白热化,从商业视角看,这一阶段的核心特征为:
· 新型号研发投入巨大;
· 车企倾向于组建联盟,共享技术、分摊高额投入;
· 小型车企被淘汰或被大型车企收购。
1.1.1 商业应用
私人乘用车具备一定驾驶自动化能力的私人乘用车已上市多年,这类车辆采用驾驶员监控模式,对应SAE分级的L2级,或ECR分级的监督模式。
车辆安全策略以人类驾驶员为核心,驾驶员负责安全、持续监控自动驾驶系统,始终保持注意力在道路上,随时准备接管。
文献记载的典型事故:
· 多起致命碰撞(图1.2),源于驾驶员对自动驾驶系统过度依赖,部分事故从正常状态到致命碰撞仅用时不足10秒;
· 2018年美国亚利桑那州坦佩市致命事故:美国国家运输安全委员会(NTSB)初步报告指出,事故源于人机交互设计缺陷、行人违规横穿道路,自动驾驶软件未识别 “推自行车的行人” 这一特殊目标;且该系统设计中,驾驶员接管会禁用自动紧急制动,导致驾驶员无法及时制动避撞。
图1.2:2018年3月,加利福尼亚州发生一起涉及特斯拉汽车的撞车事故
SAE L4级及以上(或ECR自动化级)车辆——由车辆自身承担驾驶安全责任——已落地的应用包括:低速接驳车、包裹配送、车队运营(Robotaxi)。
低速接驳车这类公共交通车辆最多可搭载15名乘客,在固定路线低速行驶(低于30km/h),已在全球多城示范运营。按SAE分级为L5级,ECR分级为自动化模式,因需随车人员负责非驾驶类安全事项。
包裹配送轻型车辆(微型车尺寸)已进入示范阶段,用于商店到住宅的包裹配送,专为城市短途配送设计,依据当地法规与车型,可在机动车道、人行道、自行车道行驶。
其安全性依托低速、轻重量(低动能)与远程人工操作员,车辆遇异常可请求远程接管。这类专用车辆无法纳入SAE分级,ECR分级为自动化模式,因需远程驾驶员应急介入。
已发生的小事故包括:人行道机器人阻塞轮椅通道、行人对人行道空间占用产生矛盾。
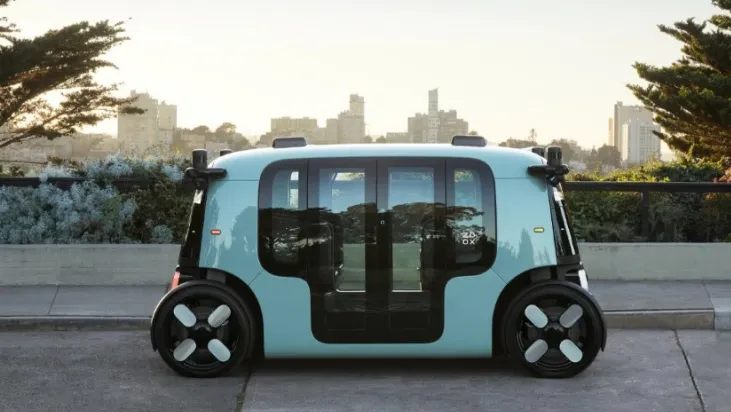
车队车辆Waymo(图1.3)、亚马逊Zoox(图1.4)已小规模部署Robotaxi,中长途货运卡车在2020年起成为热点领域,大量企业布局。
这类Robotaxi按SAE分级为L5级,ECR分级为自主模式,无需随车人员。早期安全策略依赖随车安全驾驶员,当前趋势改为:车辆请求时,远程操作员随时可用。美国加州测试期间仅报告轻微事故。
1.2 自动驾驶车辆分级
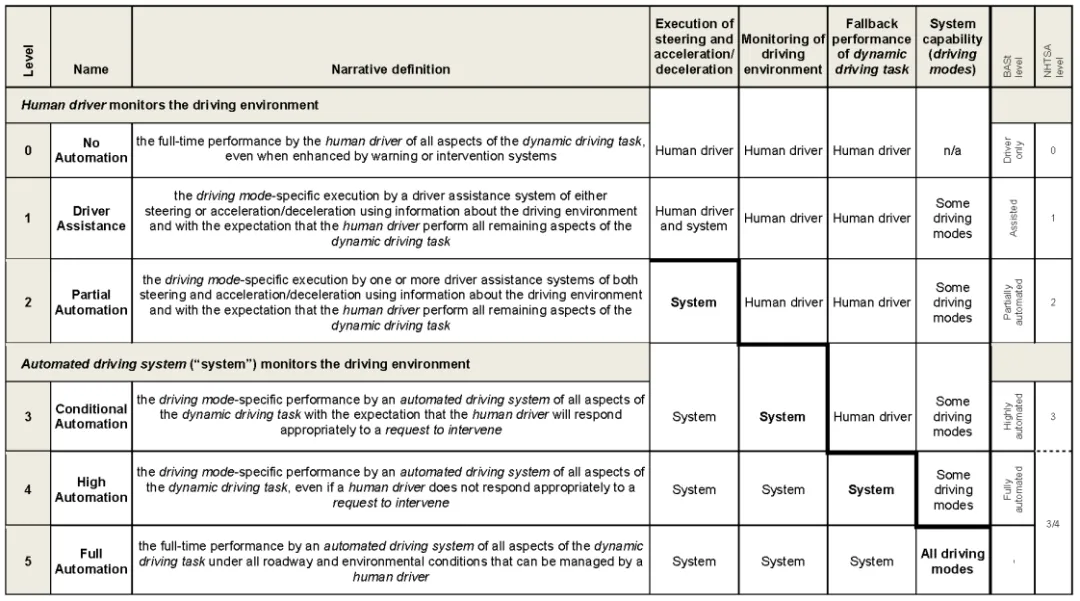
1.2.1 SAE J3016标准
SAE J3016《道路机动车自动驾驶系统相关术语分类与定义》2014年1月首次发布,2016年9月、2018年6月两次更新。
分级依据:
· 运行设计域(ODD)范围(限定/不限定);
· 动态驾驶任务(DDT)后备方案责任主体(驾驶员/后备用户/系统)。
DDT分为两大子项:
· 持续横向与纵向车辆控制;
· 目标与事件检测响应(OEDR)。
SAE J3016分级表如图1.5。
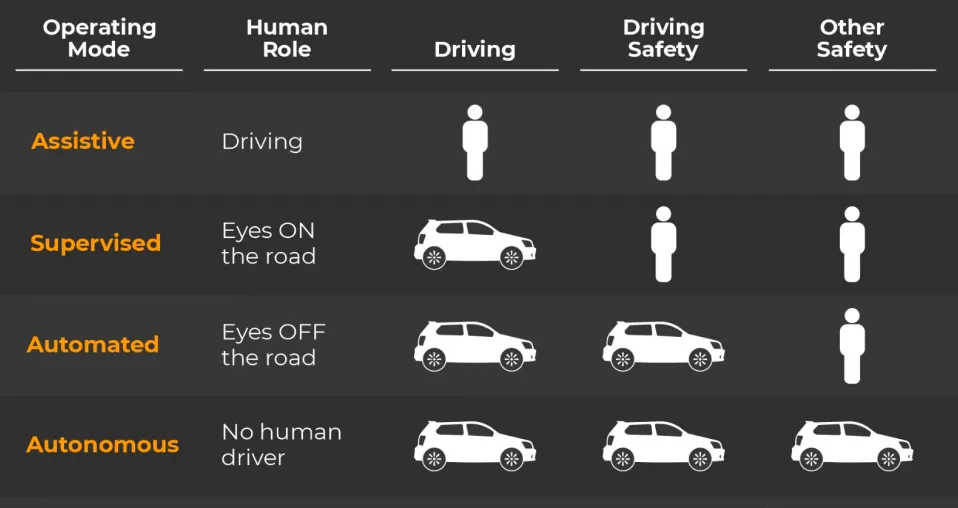
1.2.2 ECR分级:基于责任的视角
Edge Case Research公司2021年1月提出替代分级方案,以用户为中心,定义四种工作模式(基本对应SAE L2~L5),明确驾驶、驾驶安全、其他安全的责任主体(驾驶员/车辆),如图1.6。
图1.6:Edge Case Research提出的操作模式分类
相比SAE分级,其优势是明确驾驶员在各模式下的责任。
辅助驾驶车辆仅配备ADAS功能,驾驶员需主动驾驶,如ACC、AEB、车道保持等。
监督驾驶车辆完成全部动态驾驶任务,但驾驶员需持续关注道路,系统提示异常时必须及时接管。商用代表:特斯拉Autopilot、通用Super Cruise。
自动化驾驶驾驶员可脱离道路注意力,车辆承担驾驶与驾驶安全责任;此类车辆发生碰撞,责任不在驾驶员。非驾驶类安全事项(如乘客系安全带、儿童座椅固定、火灾疏散等)仍需车内成年人负责;公共交通场景需随车人员全程值守。
自主驾驶无现场人员、无持续监控,车辆全权负责驾驶与所有安全事项。
1.3 功能安全
本文研究内容仅针对ISO 26262定义的功能安全(FuSa),但需明确其与自动驾驶系统整体安全、车辆安全、网络安全、动态驾驶功能、质量管理的交互关系,如图1.7。
涉及标准:
· 系统安全:UL 4600(自动驾驶产品评估标准,2020年4月发布)
· 车辆安全:FMVSS(美国联邦机动车安全标准)、NCAP(新车评价规程)
· 网络安全:SAE J3061(2016年1月)、ISO/SAE DIS 21434(2020年2月)
· 动态驾驶功能:ISO/PAS 21488(预期功能安全,2019年1月)、ISO/TR 4804(自动驾驶安全与网络安全,2020年12月)
· 功能安全:ISO 26262(道路车辆功能安全,2011年发布,2018年更新)
功能安全(FuSa) 核心:避免车辆非预期运行带来的不合理风险。ISO 26262仅关注道路车辆电子电气(E/E)部件故障引发的风险,不覆盖标称功能安全;标称行为安全由预期功能安全(SOTIF,ISO/PAS 21488)与UL 4600覆盖。
功能安全的最终目标:设计系统在任何场景下(包括故障发生时)都能及时、正确响应外部环境。
功能安全不覆盖:蓄意篡改、应用范围假设错误,仅覆盖可预防的误用、软硬件缺陷、随机硬件失效引发的安全风险。
所有未被FuSa覆盖的事项,仍需在质量管理(QM)框架下,在安全相关系统的概念、设计、生产、运维、退役全流程中考虑。
功能安全方法演进
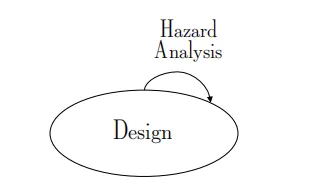
ISO 26262面向非自动驾驶车辆,基于确定性软件,行为完全可预测,依赖危害分析与风险评估(HARA),通过ASIL等级定义后续开发严格度。危害清单依赖工程师经验、文献、同类部件,风险评估(严重度/暴露度/可控性)也依赖经验,最终导出安全目标并分配ASIL。
ISO 26262的局限:高度依赖驾驶员可控性,不适合无驾驶员的自动驾驶车辆,只能强制分配最高可控性等级。其设计反馈仅来自HARA,适合ABS、巡航、气囊等环境完全已知、软件确定性的功能。
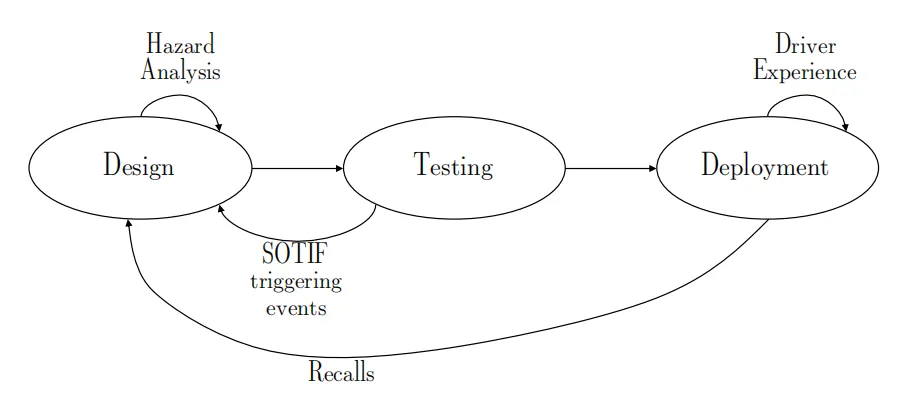
ISO/PAS 21488(SOTIF):面向L2及以上、基于机器学习的非确定性软件,覆盖标称功能风险,设计→测试→部署全流程闭环,发现异常需通过OTA持续更新软件,用关键绩效指标(KPI) 衡量偏差。
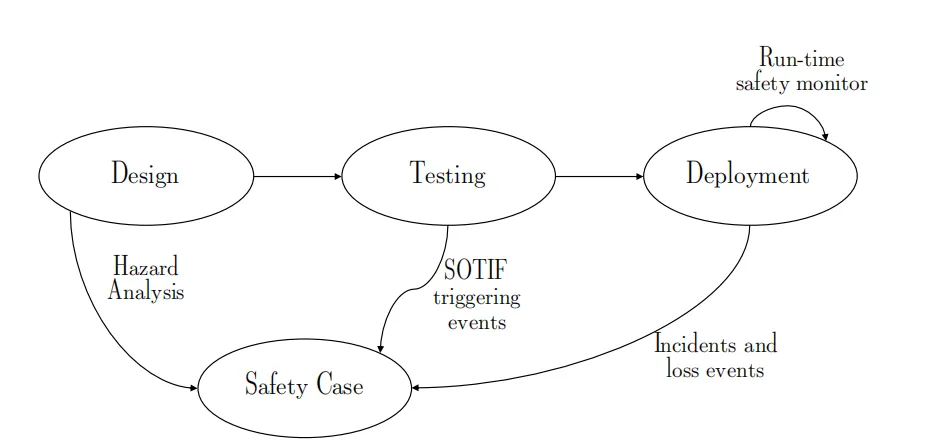
图1.9:ISO/PAS 21488(SOTIF)框架内的HARA过程
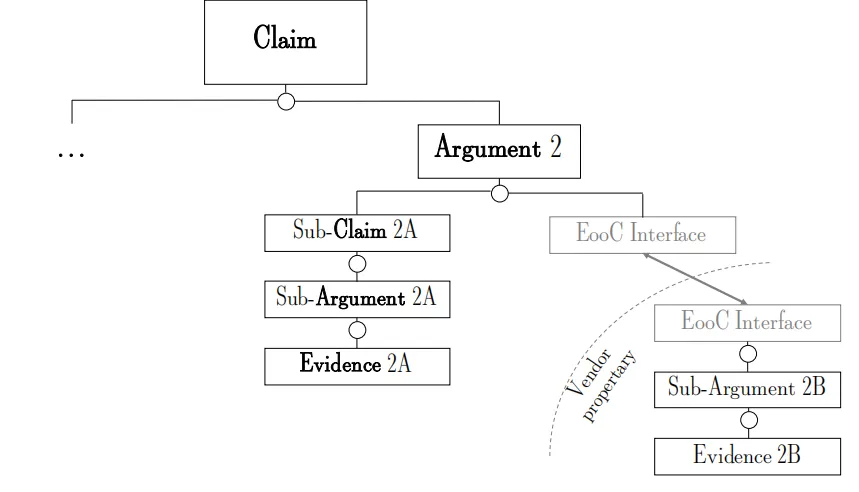
UL 4600:面向L5完全自主车辆,基于安全案例(Safety Case),将设计、测试、部署与安全案例绑定,结构为主张-论据-证据,引入上下文外元件(EooC),用安全绩效指标(SPI) 监控安全案例有效性。
图1.11:UL 4600安全箱的结构,带EooC
KPI vs SPI
· KPI:车辆是否按预期工作(精度、准确率、统计指标);
· SPI:车辆超出风险预算、导致安全案例失效的频次。
1.3.2 FIDES指南
FIDES指南2004年发布、2009年更新,由航空航天企业联合制定,用于评估硬件设计中组件的随机硬件失效概率,见2.8节。
1.3.3 AIAG&VDA FMEA手册
AIAG与VDA 2019年6月联合发布FMEA手册,指导汽车行业开展失效模式与影响分析,用于概念阶段(2.2节),与硬件设计阶段的FMEDA(2.7节)区分。
1.4 本文技术贡献
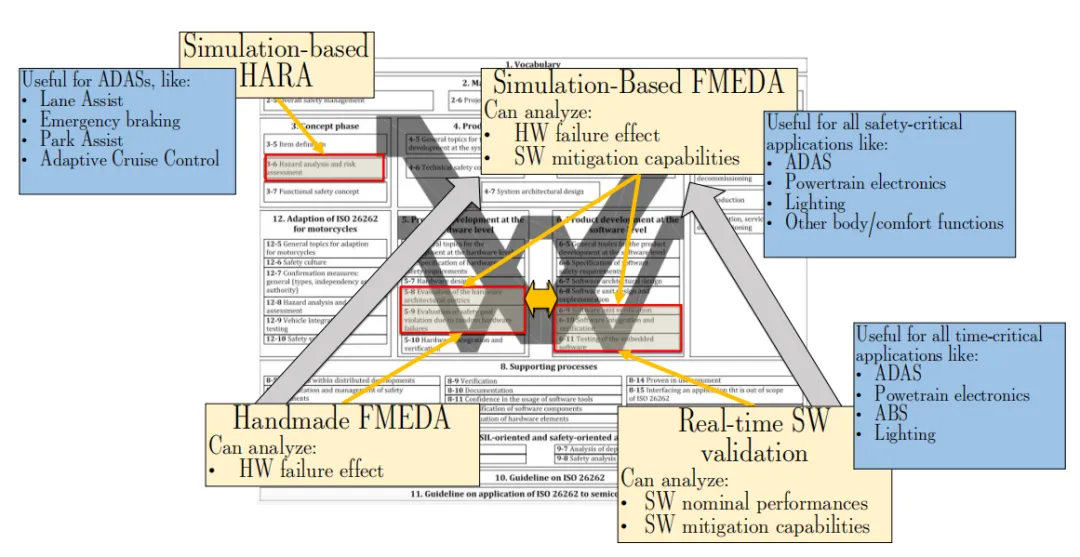
本文围绕功能安全提出多项技术方案,提升车载微控制器基电子电气安全关键系统的可靠性。所有贡献均以仿真为核心,分为三大方向(图1.13):
1. 基于仿真的FMEDA(6项方案)
2. 基于仿真的HARA(1项方案)
实时软件验证(3项方案)
图1.13:本文讨论的主题,包括汽车项目的常见应用及其在ISO 26262安全生命周期中的地位
1.4.1 面向FMEDA优化的方案
FMEDA是ISO 26262第6部分(硬件开发)强制要求的技术,用于验证硬件设计是否满足对应ASIL的可靠性指标(表2.7)。方案主要应用于汽车行业案例,最后两项方案分别面向工业与移动机器人场景。FMEDA对所有安全相关电子电气部件强制要求,车企也会将其用于非安全舒适/车身功能,提升系统可用性与用户满意度。
1.4.2 面向 HARA优化的方案
HARA是ISO 26262安全生命周期的关键环节(概念阶段,第3部分),目标是定义安全目标并分配ASIL,等级对应安全目标失效时车内/车外人员面临的最大风险。
该方法从仿真FMEDA的方案演进而来,适配HARA的特点:
· HARA在概念阶段开展,无硬件原理图,仅基于车辆行为模型;
· 失效模式仅描述部件异常行为;
· 借助整车仿真,评估部件异常对整车与驾驶安全的影响;
· 仿真可量化严重度与可控性两项风险参数,提升评估客观性与可重复性。
主要应用场景:ADAS测试与验证。
1.4.3 面向实时软件验证优化的方案
实时软件验证对安全关键嵌入式硬实时系统至关重要,目标是验证嵌入式软件(应用+驱动+支撑组件)在规定时间内无截止期错过、正确输出结果。
核心工具:实时仿真器,管理主机(HMI)与实时机的通信,实时机运行被控对象模型并响应被测设备。硬件在环(HIL)测试已广泛用于工业闭环控制系统,但以下三类场景缺乏成熟方案:
1. 汽车车身控制模块(BCM)(该文“第三部分”5.1节)
2. 航空混合关键度系统(该文“第三部分”5.2节)
3. 多智能体机器人系统(该文“第三部分”5.3节)
混合关键度与多智能体技术看似与汽车无关,但行业需求快速上升:
· 混合关键度系统可减少车内ECU数量,降低成本;
· 多智能体策略优化网联车辆与他车、基础设施的协同。
本章介绍汽车行业功能安全现状,内容结构:2.1节:ISO 26262安全生命周期,包括标准结构、功能安全管理、确认措施;2.2节:概念阶段(第3部分),部件定义、危害分析与风险评估;2.3节:功能安全概念;2.4节:系统级开发流程(第4部分);2.5节:技术安全概念;2.6节:系统级FMEA;2.7~2.8节:硬件级开发(第5部分),FMEDA、FIDES;2.9节:故障注入;2.11节:软件级开发(第6部分)。
2.1 安全生命周期
2.1.1 ISO 26262标准结构
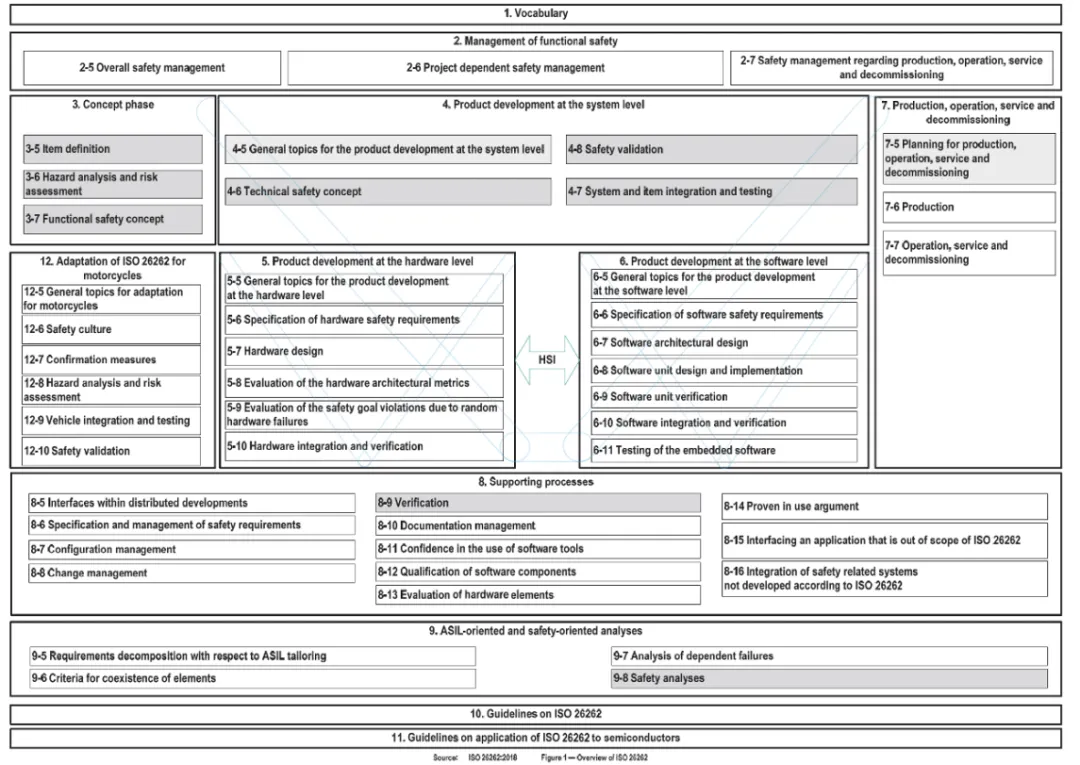
ISO 26262:2018结构如图2.1。
2.1.2 功能安全管理
功能安全管理(FSM)是ISO 26262的核心,是安全生命周期落地的基础,并非独立流程,而是质量管理体系(QM)的增强。
前提:企业已落地ISO 9001、IATF 16949质量管理体系,再结合ISO 26262、ISO/PAS 21448、ISO/SAE 21434、UL 4600实施。
功能安全管理分为项目无关与项目特定两部分。
项目无关要求
· 功能安全培训与资质体系(安全文化);
· 企业级安全生命周期与支撑流程;
· 功能安全持续改进流程;
· 前置实施ISO 9001 + IATF 16949。
项目无关工作产物
· 企业功能安全规则与流程;
· 员工能力证明;
· 质量管理体系证明;
· 安全异常上报规则。
项目特定活动每个项目必须制定安全计划,明确:
· 活动目标;
· 输入文档;
· 安全活动责任人;
· 时间与周期;
· 资源;
· 供应商接口;
· 工作产物标识。
安全计划还需定义验证与确认(V&V) 活动:
· 每项安全需求的验证方法(评审/分析/仿真/测试);
· 各开发阶段验证步骤;
· 测试验证策略;
· 测试结果文档。
项目安全角色
· 安全经理:负责FSM,制定维护安全计划、监控执行、规划安全活动、记录进展、分配任务、管理交付物;
· 项目经理:任命安全经理,确保安全活动执行、合规性、资源保障;
· 安全团队:执行安全相关活动;
· 安全工程师:安全团队成员。
2.1.3 确认措施
确认措施需满足独立性要求:
· -:无要求/无建议;
· I0:建议执行,执行人需与工作产物创建人不同;
· I1:必须由与创建人不同的人员执行;
· I2:必须由独立于开发团队的人员执行(非同一直属上级);
· I3:必须由管理与发布权限完全独立的团队执行。
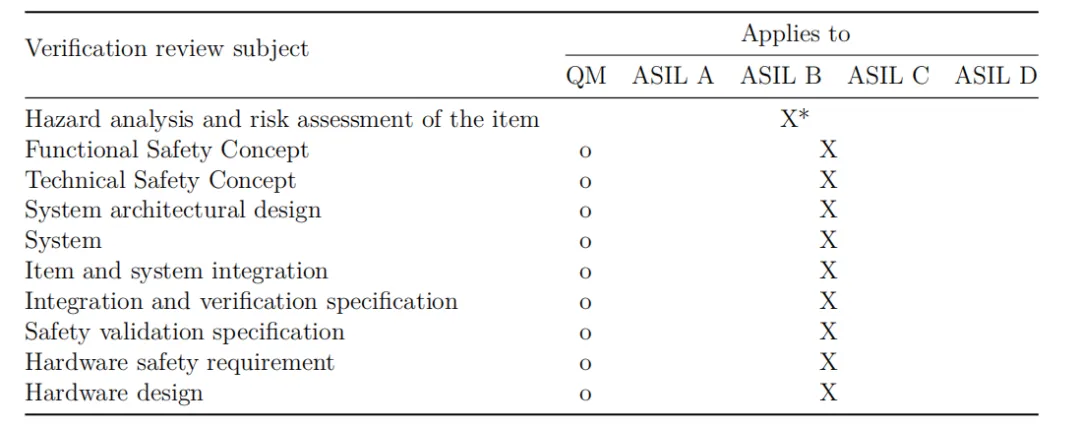
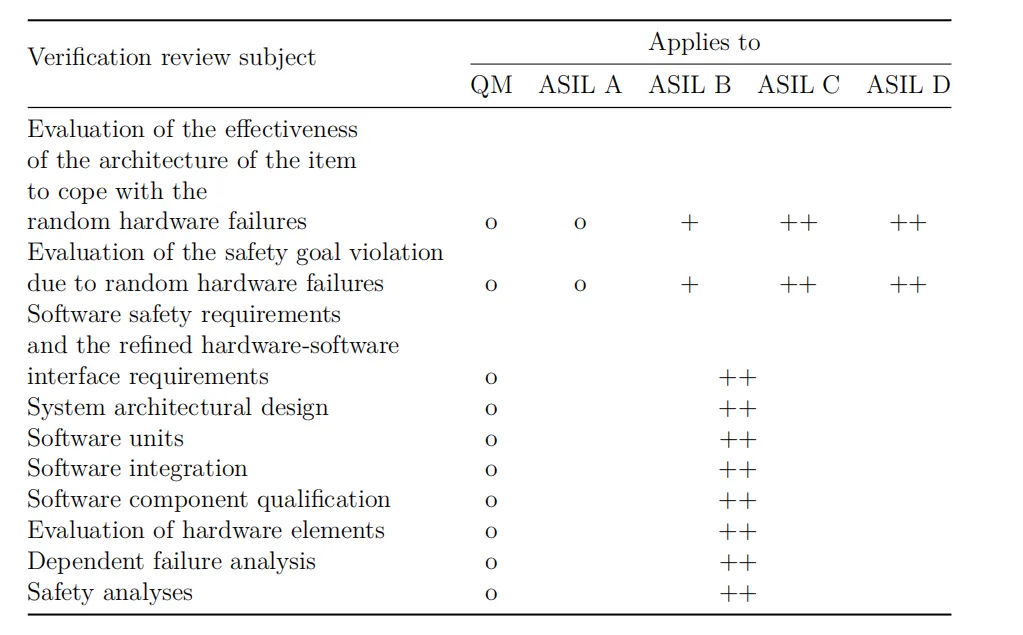
表2.1、2.2列出各工作产物的验证要求。
表2.1:验证措施概述。o:无相关要求,也不对此提出支持或反对的建议;X:为必需项;X*:本综述的范围还包含被评定为QM类别的危害事件
表2.2:验证措施概述。o:无相关要求,也不对此提出支持或反对的建议;+:推荐采用;++:强制要求/必需项
2.2 概念阶段
概念阶段解决电子电气系统异常引发的危害,考虑系统间交互;仅关注E/E故障引发的危害,不覆盖电击、火、烟、热、辐射、毒性、易燃性、腐蚀等(除非由E/E故障直接导致)。
核心阶段与工作产物
1. 部件定义
2. 危害分析(HARA)
3. 功能安全概念(FSC)
核心目标
· 识别危害、制定安全目标并分配ASIL;
· 输出部件功能安全需求(FSR);
· 输出初步框图,明确各模块安全目标与ASIL。
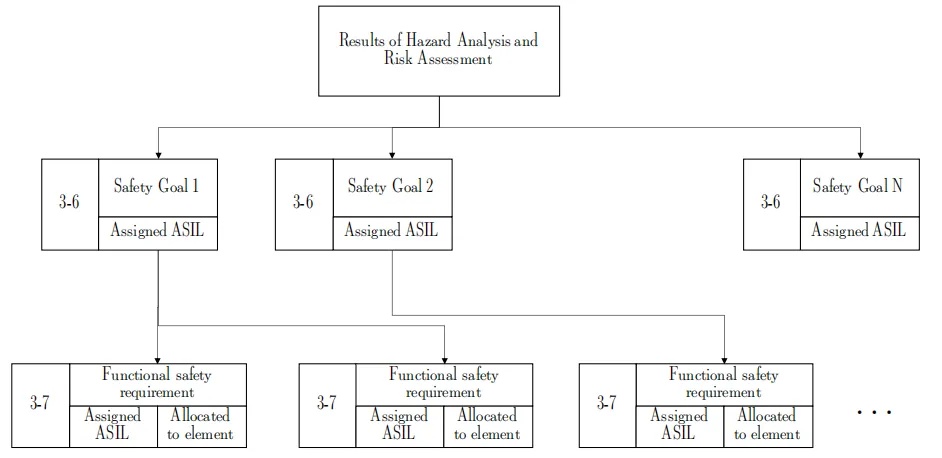
HARA流程如图2.2:安全目标由HARA导出,功能安全需求从安全目标分解,最终分配到系统架构设计。
2.2.1 部件定义
明确被分析的部件/系统,提供足够信息:功能、依赖、与其他系统交互,支撑HARA与功能安全概念开展(ISO 26262-3:2018第5章)。
2.2.2 危害分析与风险评估(HARA)
按ISO 26262-3:2018第6章执行,目标:
· 识别并分类部件异常行为引发的危害事件;
· 评估风险等级;
· 制定安全目标并分配ASIL,规避不合理风险。
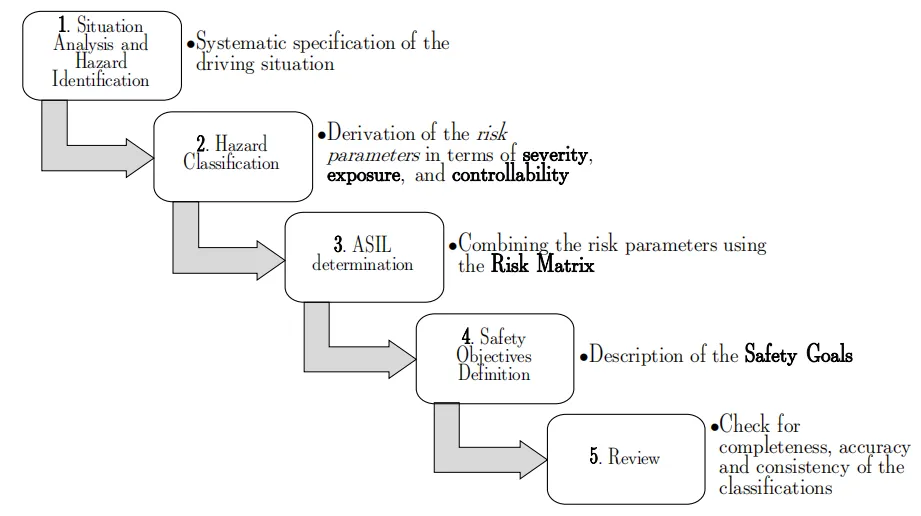
HARA分为5个阶段(图2.3)。
场景分析与危害识别(SA/HI)系统梳理驾驶场景,归纳式分析部件可预见异常行为引发的所有危害;需明确排除分析的故障与危害清单。
危险与可操作性分析(HAZOP)用于识别潜在失效与整车级危害,从流程行业引入,适配车辆功能,关键词:
· NO/NOT:无功能;
· MORE THAN INTENDED:过量;
· LESS THAN INTENDED:不足;
· NOT REQUESTED:非请求激活;
· INCORRECT DIRECTION:反向;
· EARLY/LATE:过早/过晚;
· LOCKED:锁死。
场景梳理通过以下维度组合生成场景:
· 地点:停车场、路口、城市、乡村路、高速;
· 速度:低/中/高/超高速;
· 交通:行人、前车、对向车、后车;
· 操作:轻/重制动、紧急停车、轻/重加速、超车、转弯、掉头、起步、直行;
· 驾驶员在/离车。
笛卡尔组合会产生海量场景,需剔除矛盾、违规场景;过度碎片化会导致暴露度评估失真,建议仅分析有意义、可能产生危害的场景,逐项给出定性分析依据。
危害分级导出三项风险参数:严重度(S)、暴露度(E)、可控性(C)。评估参考同类功能安全分析、文献资料,结合工程师经验适配具体案例。
严重度按表2.3分级:
· S0:无伤害
· S1:轻/中度伤害
· S2:重度/危及生命(存活不确定)/致命
· S3:危及生命(存活不确定)/致命
表2.3:ISO 26262-3表B1:严重程度分级示例
可控性按表2.4分级:
· C0:完全可控
· C1:简单可控
· C2:通常可控
· C3:难以控制/不可控
表2.4:改编自ISO 26262-3表6可控性等级
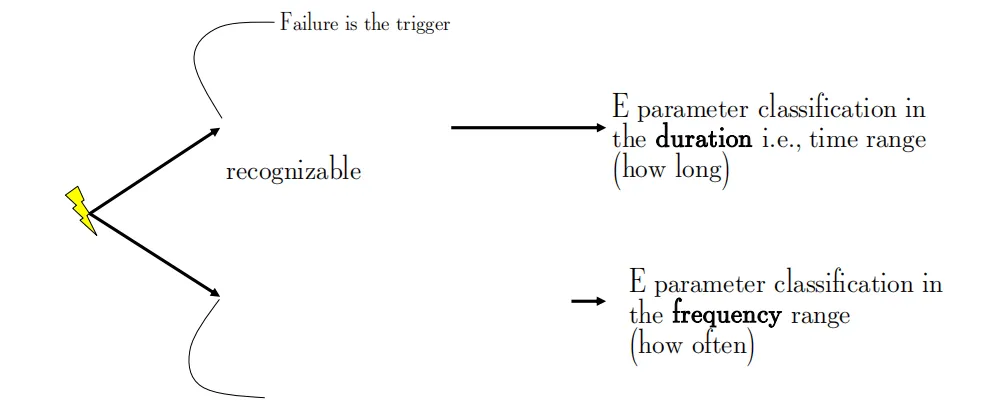
暴露度按时间占比或场景频次分级(图2.4、表2.5):
· E1:极低概率
· E2:低概率
· E3:中等概率
· E4:高概率
表2.5:改编自ISO 26262-3表6暴露等级;(“持续时间”行提取自ISO26262:2018-3表B.2;“场景发生频率” 行提取自ISO26262:2018-3表B.3)
ASIL确定技术风险降低措施分为4级:A、B、C、D,D最高。ASIL仅绑定安全目标,不绑定部件。通过三项参数组合,用风险矩阵(图2.5)确定ASIL。
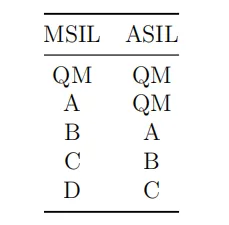
摩托车MSILISO 26262第二版为摩托车定义MSIL,共4级,映射到ASIL(表2.6)。
安全目标定义危害评估完成后,为部件定义安全目标(SG),即“禁止发生的危险状态”,如“车辆不发生非预期加速”。每个安全目标分配最高等级 ASIL(对应其失效时人员面临的最高风险)。
独立评审HARA必须经I3 级独立评审(完全独立部门),验证完整性、准确性、分级一致性。
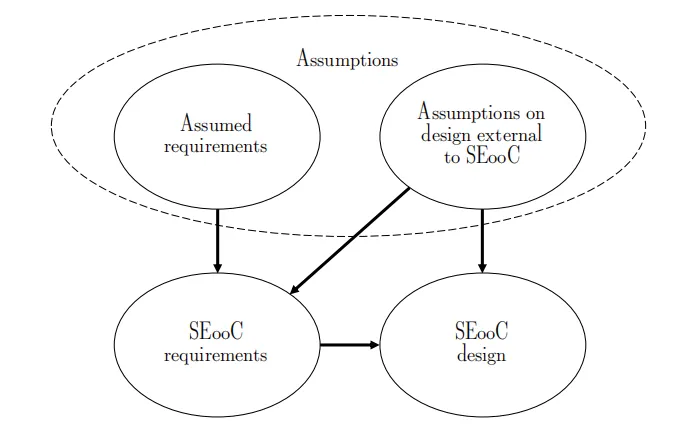
2.2.3 上下文外安全元件(SEooC)
多数场景下,部件/系统为特定车辆开发;但实际常使用商用现货(COTS)组件,或部件本身作为COTS出售,这类部件称为SEooC。
SEooC:不针对特定应用/功能/车辆开发的安全相关元件,如微控制器、驱动桥、仪表。开发时基于假设应用场景,设计满足假定安全需求与ASIL,遵循完整ISO 26262流程。集成方需验证假设与接口的有效性。
2.3 功能安全概念
功能安全概念描述如何实现安全目标,以功能安全需求(FSR)形式定义,分配到初步系统架构或外部措施。
建议用状态图描述部件状态:
· 标称工作模式;
· 紧急工作模式;
· 降级工作模式;
· 安全状态。
需明确状态切换逻辑。
2.3.1 功能参数
· 工作条件;
· 容错时间与间隔;
· 向安全状态/降级/紧急模式切换;
· 功能冗余。
警告与降级策略
· 故障安全(Fail-safe):失效后关闭功能;
· 故障运行(Fail-operational):降级性能继续工作(优雅降级)。
驾驶员动作若需驾驶员配合,需描述动作、平均驾驶员响应依据、无响应/错误响应后果、驾驶员培训方案。
2.3.2 安全架构
功能安全概念需用框图描述功能冗余与模块独立性,明确各模块ASIL要求与分解方案。
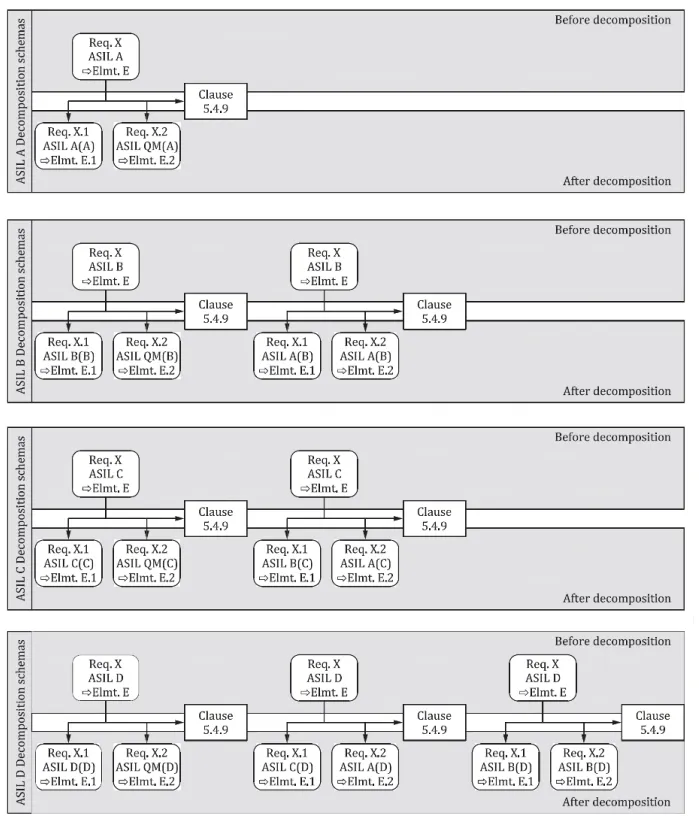
2.3.3 ASIL分解
ASIL分解:将安全需求的ASIL分配到多个独立元件,需满足独立性,规则如图2.7。
图2.7:ISO26262-9图2分解安全需求时ASIL的分类方案
2.3.4 功能安全需求
编写原则:最大化车辆可用性,同时保证运行安全。关键点:
· 基于潜在失效模式定义安全状态;
· 定义状态切换、降级、安全状态触发条件。
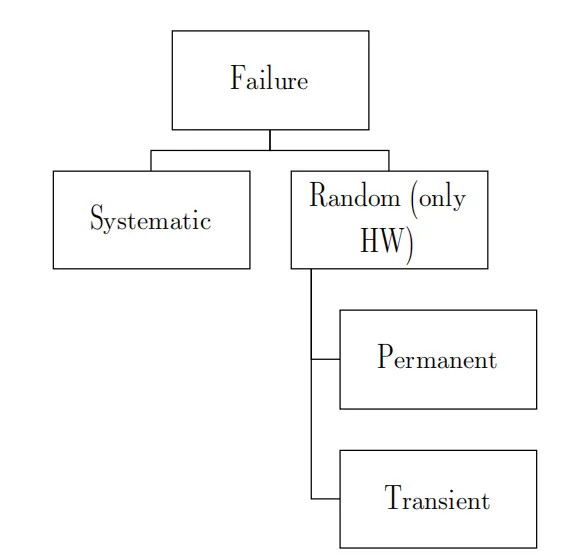
失效分类故障分为系统性失效与随机(硬件)失效(图2.8):
· 系统性失效:确定性原因导致,仅能通过设计/工艺/流程/文档修改消除,软件仅存在系统性失效;
· 随机失效:硬件生命周期内不可预测发生,服从概率分布,分为永久性(损坏不可恢复)与瞬时性(一段时间后自愈,如存储器软错误)。
功能安全应对策略:
· 系统性失效:预防,严格执行安全计划;
· 随机失效:失效发生后安全响应。
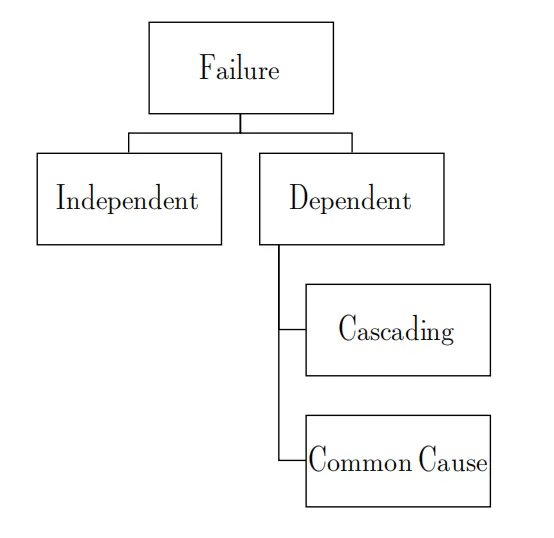
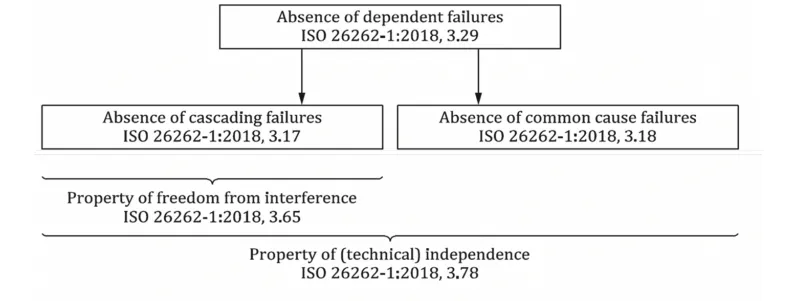
失效还可分为独立失效与相关失效(图2.9):
· 独立失效:联合概率=单失效概率乘积;
· 相关失效:不满足独立条件,分为级联失效与共因失效。级联失效需具体分析,共因失效可通过相关故障分析规避(图2.10)。
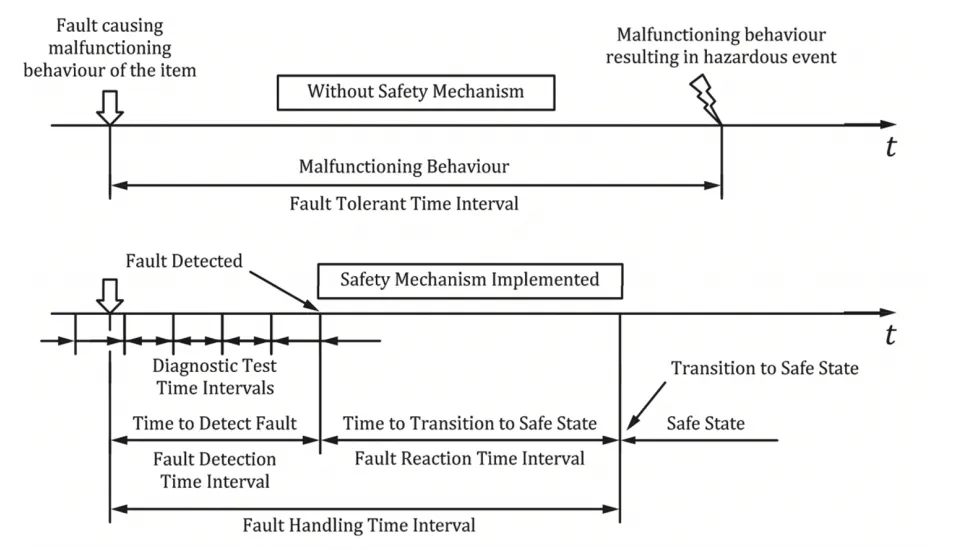
功能安全时序系统不仅要正确,还要及时,关键时间间隔(图2.11):
· FDTI:故障发生→检测的最大时间;
· DTTI:在线诊断执行间隔;
· FRTI:检测→进入安全状态 / 紧急模式的时间;
· FHTI = FDTI + FRTI;
· FTTI:故障发生→危害事件的容忍时间;
· 缓解延迟:故障注入→进入安全状态的时间,必须 ≤ FTTI。
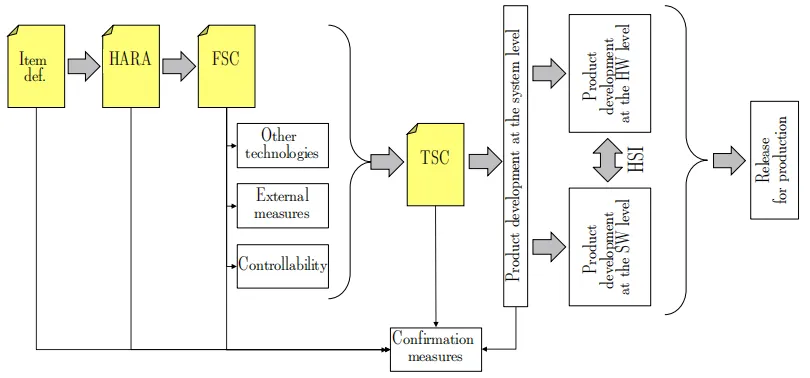
2.4 实施阶段
技术安全概念(2.5节)完成并通过确认措施后,启动产品实施阶段,由ISO 26262第4(系统)、5(硬件)、6(软件)部分管理,软硬件并行开发,软硬件交互(HSI) 是可靠性关键点,尤其硬件故障的软件检测与缓解。
2.5 技术安全概念
系统级开发依据第4部分,核心输出技术安全概念(TSC),从功能安全需求与初步架构导出,包含技术安全需求(TSR):
· 系统内部故障检测与控制机制;
· 外部系统故障检测与控制机制;
· 安全状态实现/维持措施(切换、容错、紧急运行间隔);
· 警告与降级实现措施;
· 安全验证规范(独立验证计划);
· 潜伏故障避免机制(测试间隔);
· 潜伏故障控制机制(双点失效安全措施),ASIL需求:D→B,C/B→A,A→QM。
2.6 FMEA
AIAG&VDA 2019年FMEA手册分为7步(图2.13):
1. 策划准备
2. 结构分析
3. 功能分析
4. 失效分析
5. 风险分析
6. 优化
风险沟通
图2.13:AIAG和VDA FMEA手册描述的7个步骤
分为设计FMEA(评估设计)与过程FMEA(评估生产过程),本文关注设计FMEA。
2.7 硬件设计与 FMEDA
ISO 26262第4部分表1要求用归纳法+演绎法开展系统架构分析,FMEDA是归纳法核心,用于评估随机硬件失效后果,需结合FIDES(2.8节)计算失效率。
2.7.1 分级规则
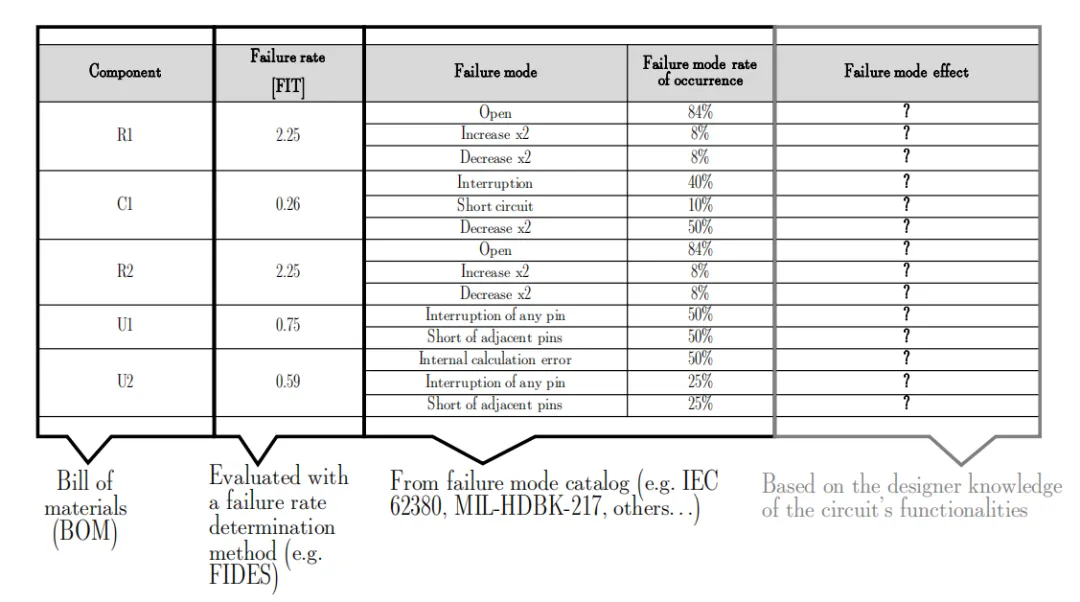
FMEDA核心是失效模式影响分级,输出表格(图2.14),包含:
· 组件失效率(FIT,FIDES计算);
· 失效模式、发生率、影响。
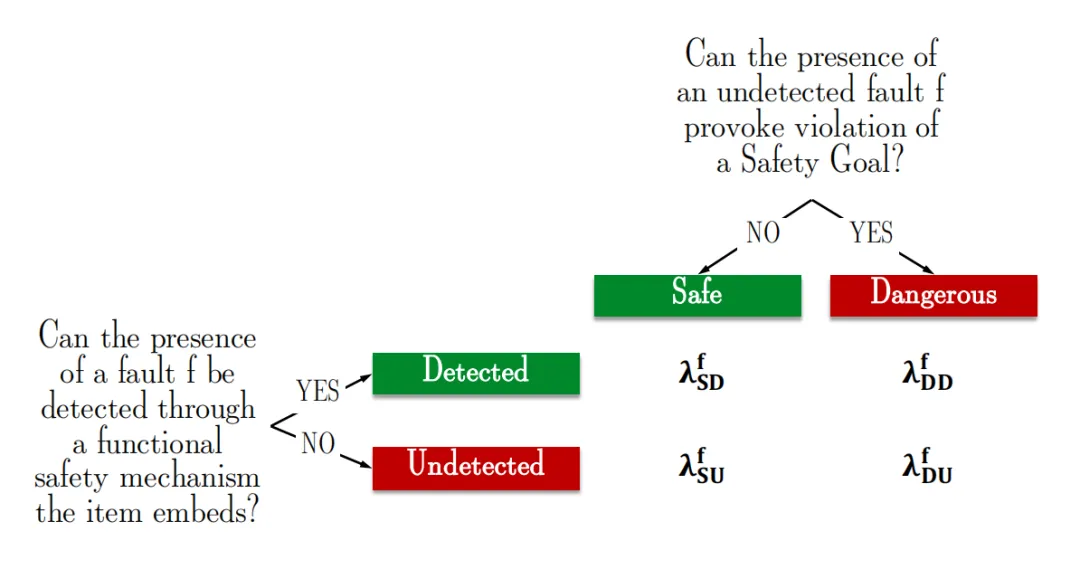
分级目标:判断失效是否可检测、是否单独导致安全目标违反(图2.15)。
2.7.2 速率与指标
(部件的)失效率
失效率,在下文中表示为λc,是可能影响FIT中表示的组件c的随机硬件失效的发生率。
从所有组件的失效率λc(作为硬件验证的输出结果)出发,工程师需通过计算随机硬件失效率、单点故障指标和潜伏故障指标,并证明这些指标满足该组件对应 ASIL 等级的目标值,以此提供其健壮性的验证证据。
由于单个组件可能以多种方式失效(每种失效方式称为一个失效模式),因此定义组件失效模式的发生概率λf是很方便的,基于此可针对特定失效模式f定义各类失效率与指标。
组件c的λc由λf乘以该失效模式f的发生概率计算得到。
组件失效率
组件总失效率λ指整个组件的故障发生概率,单位为FIT(失效时间,1 FIT =10−9/小时)。其定义为该组件物料清单(BOM)中所有组件(或所有组件失效模式)失效率的总和,如公式 (2.1) 所示:
危险未检测故障(单点故障)率
危险未检测故障率λfDU指未被组件内置的任何功能安全机制检测到,且可** 单独(即单点)**导致一项或多项安全目标被违反,从而对组件使用者造成危害的故障发生概率。
单点故障率(spf) 定义为所有危险未检测故障率的总和,如公式 (2.2) 所示:
危险已检测故障(残余故障)率(Dangerous detected (Residual fault) rate)
危险已检测故障率λfDD指被组件内置的功能安全机制检测到的故障发生概率。需要注意的是,若此类故障未被检测到,安全机制显然无法触发其缓解策略,此时仍可导致一项或多项安全目标被违反(即残余故障),从而对组件使用者造成危害。
残余故障率(rf)定义为所有危险已检测故障率的总和,如公式 (2.3) 所示:
安全未检测故障(潜伏故障)率
安全未检测故障率λfSU指未被组件内置的任何功能安全机制检测到(即潜伏),且无法单独导致一项或多项安全目标被违反的故障发生概率。不过,这类故障在FMEDA(失效模式、影响与诊断分析)中会被重点关注,因为一旦叠加一个或多个其他故障,其组合可能违反一项或多项安全目标,从而对组件使用者造成危害。
潜伏故障率(lf) 定义为所有安全未检测故障率的总和,如公式 (2.4) 所示:
安全已检测故障率
安全已检测故障率λfSD指被组件内置的功能安全机制检测到,且无法单独导致一项或多项安全目标被违反的故障发生概率。其定义如公式 (2.5) 所示:
该比率不用于计失效指标。
2.7.3 失效指标
随机硬件失效指标:
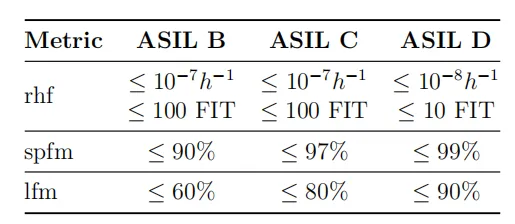
ASIL 指标限值(表2.7):
当计算出的指标满足表2.7中基于目标ASIL级别的rhf、spfm和lfm的需求时,硬件设计验证即告完成。
2.8 FIDES
FIDES 2009指南用于计算随机硬件失效概率,单位FIT(1 FIT=1次/10⁹小时)。
2.8.1 指南结构
· 预测可靠性评估指南;
· 可靠性过程控制与审核指南。
2.8.2 定义
注意:FIDES术语与ISO 26262存在差异,本文统一使用ISO 26262词汇:
· 可靠性:产品在规定条件、规定时间完成规定功能的能力;
· 系统:完成运营角色的设备集合(汽车、飞机、计算机);
· 子系统:系统内完成运营功能的设备集合(ABS、GPS);
· 设备:完成完整功能的组件集合(ABS计算机、GPS屏幕);
· 组件:装配后实现功能的单元(电阻、电容、PCB);
· 产品:被研究可靠性的装配实体;
· 元件:不可拆分的可靠性研究基本单元(对应ISO 26262组件)。
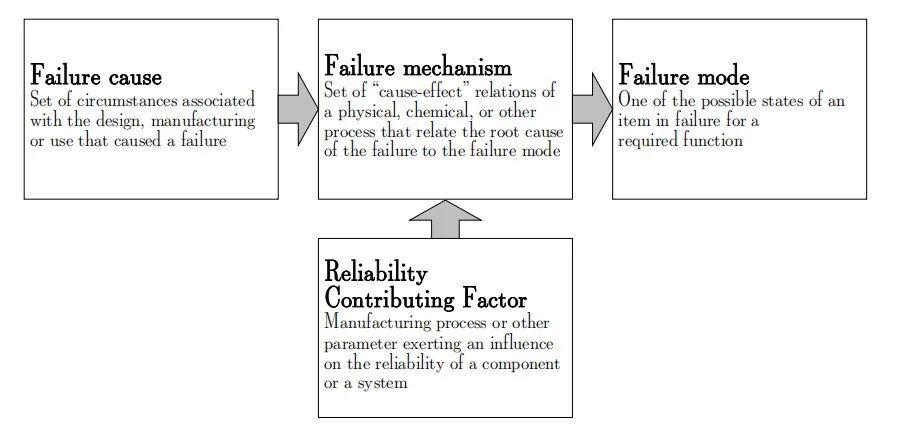
失效原因、机理、模式、可靠性影响因子如图2.16。
图2.16:失效原因、机制、模式和可靠性贡献系数之间的关系
2.8.3 模型覆盖
FIDES考虑:
· 开发/制造错误引发的失效;
· 电/机械/热过应力(应用相关、未明确声明);不考虑:
· 软件失效;
· 未确认失效;
· 未执行预防性维护导致的失效;
· 已确认的意外攻击(失效传播、超规格使用、误操作)。
2.8.4 可靠性预测
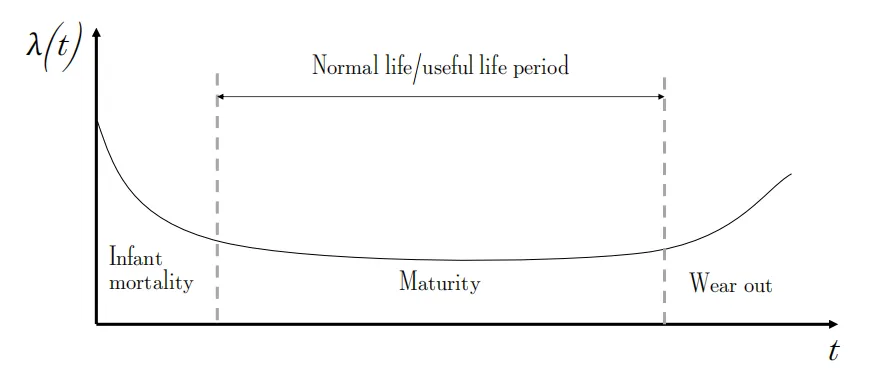
FIDES输出失效率λ,产品寿命分为三段(浴盆曲线,图2.17):
1. 早期失效:可通过老化筛选规避;
2. 有效寿命:失效率近似恒定(随机失效);
耗损失效:失效率上升,需定期更换。
FIDES仅评估有效寿命的随机失效。
2.8.5 预测可靠性评估输入
· 环境与使用条件:工作温度、温度循环幅值/频率、振动、湿度、污染、意外过应力;
· 产品定义:物料清单、元件技术参数;
· 应用信息:元件应力、局部温度/环境参数。
2.8.6 通用模型
通用模型(见公式2.9)在综合考虑物理因素与过程因素的基础上,计算组件的失效率。
λ 代表失效率,∑Physical contributions是一个以加法为主的构造项,包含了对可靠性产生影响的物理与技术因素;而 ∏Process contributions是一个乘法项,代表开发、生产和运行过程对可靠性的影响。
公式2.9可改写为:
其中:
· λPhysical:代表物理贡献(即基础物理失效率)
· ΠPM(PM为Part Manufacturing的缩写):代表对组件制造环节的质量与技术控制水平
· ΠProcess:代表对包含该组件的产品在开发、制造及使用全流程中的质量与技术控制水平
2.8.7 寿命剖面(Life profile)
对FIDES指南的完整阐述超出了本论文的研究范畴。FIDES指南的核心概念是寿命剖面。
在为可靠性预测构建寿命剖面时,需要梳理在组件全生命周期内可能导致失效的各类因素。这需要采用工程化的可靠性分析方法,且对可靠性评估至关重要,因为它会显著影响预测的准确性。
FIDES 模型的设计对物理影响因素高度敏感。若在构建寿命剖面时选取偏高或偏严苛的取值以保持保守性,会大幅削弱结果的预测价值。安全工程师可将寿命剖面描述的详细程度与精度,限制在产品寿命可被预测的精度水平内。
寿命剖面的总体描述
第一步是从定性角度进行描述,需明确:
· 产品集成到系统中时所属平台的具体类型;
· (如适用)产品在平台中的安装位置;
· 所考虑的地理或气候区域;
· 产品的使用类型。
阶段划分(Choice of phases)
阶段的划分必须足够全面,以完整描述不同的使用场景。为便于理解复杂的寿命剖面,可对每个阶段标注:
· 清晰的阶段标题;
· 描述性段落。
当环境条件在应力层面发生显著变化时,必须重新定义一个新的阶段。目前尚无通用的阶段划分方法,通常可基于产品典型的单日使用场景开展分析。
阶段时长(Phase duration)
建议设计者构建总时长为1年(即8760小时)的寿命剖面。其目标是计算以日历FIT表示的失效率,这比使用“每运行小时”或“每任务小时”等其他单位更受推荐。阶段时长必须以小时为单位,尽可能真实地描述产品的活动状态。
由于失效率λ需以FIT(每109小时1次失效)为单位,因此需要按每年的小时数对各阶段时长进行加权计算,如公式 (2.11) 所示:
适用域(Applicability domain)
适用域(即需要为每个阶段识别的物理影响因素)包括:
· 温度(及热电)应力;
· 温度循环;
· 湿度;
· 振动;
· 化学应力;
· 应用类型。
一般而言,可靠性预测仅适用于组件已通过认证的环境域。
2.9 故障注入
故障注入是评估系统故障敏感性的通用技术:刻意引入故障,观察系统响应。可用于:容错方案验证、可靠性验证、故障预测、容错等级评估。分为硬件故障注入与软件故障注入,软件故障注入用于评估缺陷(bug)对安全关键系统的影响。
2.10 FMEA与FMEDA区别
· FMEA:概念阶段开展,行为级预测失效,早期缓解措施;
· FMEDA:硬件设计阶段开展,评估硬件(+嵌入式软件)可靠性。
2.11 嵌入式系统软件开发
在 ISO 26262 框架下开发负责执行安全关键任务的软件,需要遵循其第6部分所描述的严格开发流程。
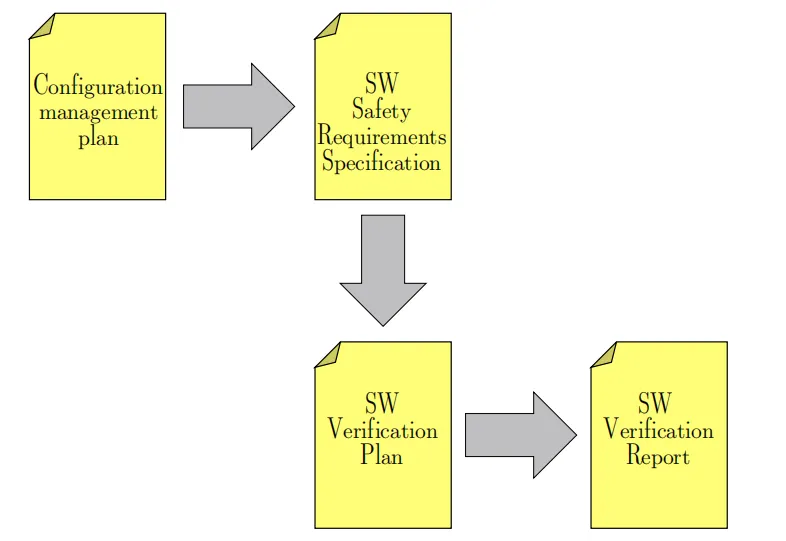
软件开发涉及的主要规范工作产物是配置管理计划。基于该计划,将编制一份软件安全需求规范文档。
一旦我们拿到后一份文档(软件安全需求规范),就需要编写一份软件验证计划,用以说明如何对软件进行测试;在软件实现并完成测试后,还需编制一份软件验证报告,作为已开展测试与验证活动的证明。这些文档之间的关系如图2.18所示。
图2.18:从配置管理计划到软件验证报告的WP之间的关
配置管理计划(CMP)的编制需综合考虑安全计划、组织特定的功能安全准则,以及生命周期各阶段的适用前提条件。
CMP明确了复现软件(SW)所需的工作产物:
·模型(和/或)源代码;
· 软件开发环境(含其配置);
· 软件交付物(包括源代码与二进制文件);
· 驱动程序;
· 操作系统;
· 各项开发活动的佐证材料。
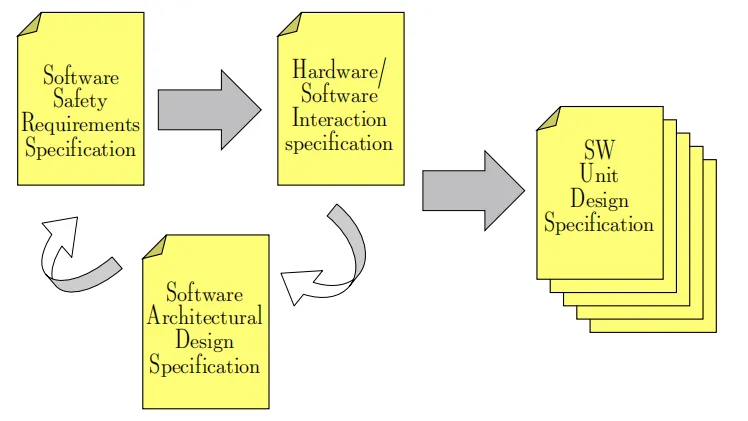
聚焦于软件实现流程,除已提及的软件安全需求规范外,预期产出的工作产物还包括:软件架构设计规范、软硬件交互规范,以及针对架构中规划的每个软件单元,编制一份软件单元设计规范。这些文档之间的关系如图2.19所示。
2.11.1 术语
· 组件(Component):逻辑/技术可分离,包含多个硬件部分/软件单元;
· 硬件部分(HW part):硬件组件一级分解单元(电阻、CPU);
· 元件(Element):系统、组件、硬件部分、软件单元;
· 嵌入式软件(Embedded SW):运行在处理元件上的完整集成软件;
· 软件组件(Software Component (SWC)):一个/多个软件单元组合;
· 软件单元(Software Unit):可独立测试的最小软件组件。
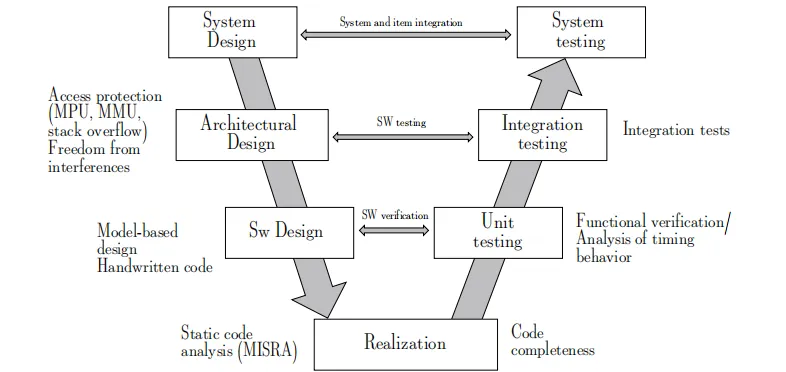
2.11.2 V模型
软件开发通用流程(图2.20),左侧开发、右侧验证,闭环修复缺陷。
2.11.3 基于模型的软件设计(MBSD)
用Simulink等工具建立软件单元与架构模型,仿真验证后自动生成C/C++代码,可与手写代码集成,加速开发、保证质量、简化测试。
2.11.4 软件单元测试
单元测试目标:消除系统性缺陷,覆盖:
· 语句覆盖:执行语句百分比;
· 分支覆盖:执行分支百分比;
· 修正条件/判定覆盖(MC/DC):独立影响结果的条件百分比。
MIL:模型在环,仿真环境运行模型;
SIL:软件在环,对比模型与自动生成代码/手写代码;
PIL:处理器在环,目标硬件执行代码,验证工具链、测量最坏执行时间(WCET)。
2.11.5 软件集成测试
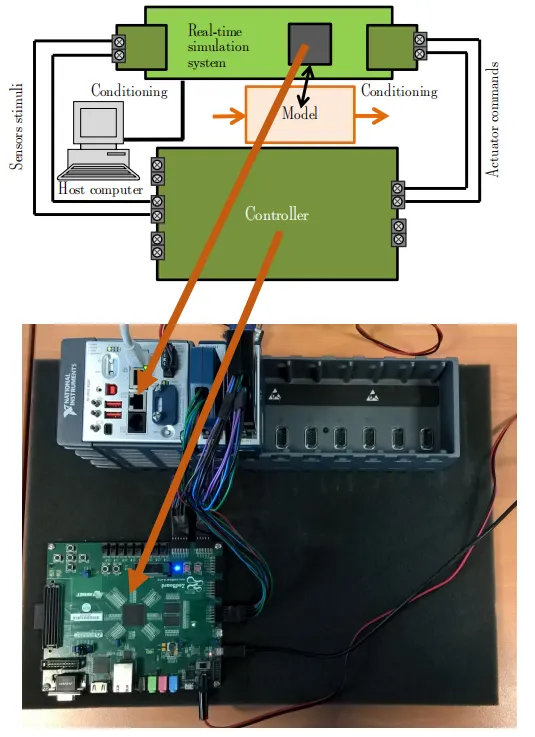
调试器:嵌入式系统无键盘屏幕,需外部调试器监控内存、变量、运行时;实时测试:硬实时系统必须按时序执行,需Trace工具测量运行时;硬件在环(HIL):目标运行完整软件,实时机运行被控对象模型,电信号等效真实环境,“欺骗”控制器以为在真实世界(图2.21)。
图2.21:HIL概念结构与实际实现的比较,基于National Instruments cRIO作为实时模拟器和ZedBoard作为控制器
在该系列文的后续“第二部分”中,我们将重点解析基于仿真的FMEDA方法研究成果。请持续关注“猿力部落”公众号后续发布的该系列文章后续篇章。
免责声明:文中观点仅供分享交流,文章版权及解释权归原作者及发布单位所有,如涉及版权等问题,请您联系TechApe@yeah.net告知,我们会在第一时间做出处理。