一篇讲清楚“控制模块”的核心作用(建议收藏)
在自动驾驶系统中,如果说:
那么控制模块解决的就是最后一个关键问题:如何把决策真正变成车辆的实际动作?这篇文章只做一件事——把自动驾驶控制模块的核心逻辑拆解清楚。
一、控制在系统中的位置
自动驾驶系统可以拆解为:感知 → 规划 → 控制 → 测试
其中:
感知提供环境信息
规划生成路径与轨迹
控制负责执行这些轨迹
可以把控制理解为:系统的“执行层”。
二、控制的核心目标是什么?
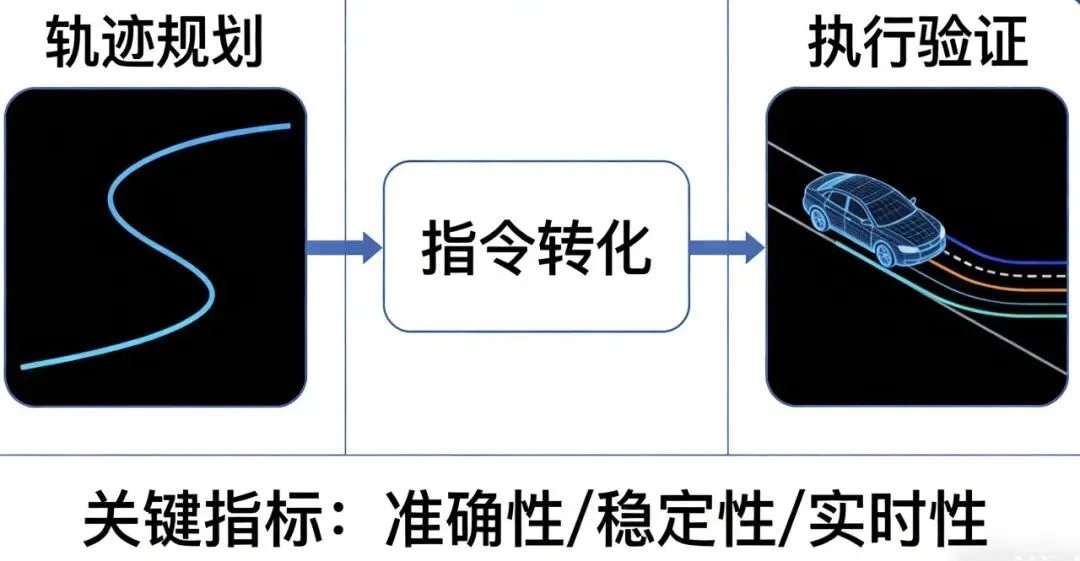
可以用一句话概括:将规划生成的轨迹,转化为车辆可以执行的控制指令。
这里的关键在于:
准确性:尽可能贴近规划轨迹
稳定性:避免抖动或不连续操作
实时性:快速响应变化
三、控制模块具体在做什么?
从功能上来看,控制模块主要包括三个核心任务:轨迹跟踪 → 控制计算 → 指令输出
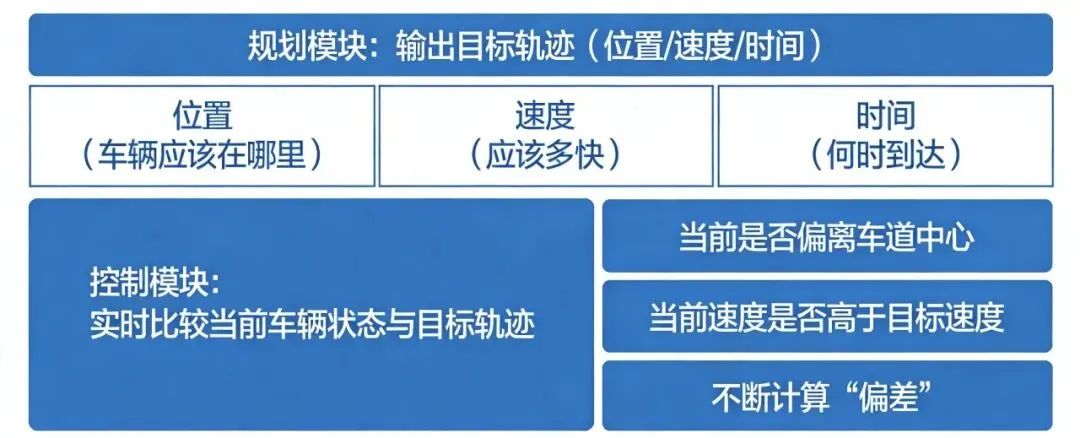
1. 轨迹跟踪(Tracking)
规划模块会输出一条轨迹,包含:
位置(车辆应该在哪里)
速度(应该多快)
时间(何时到达)
控制模块需要做的,是:实时比较“当前车辆状态”和“目标轨迹”。
例如:
可以理解为:不断计算“偏差”。
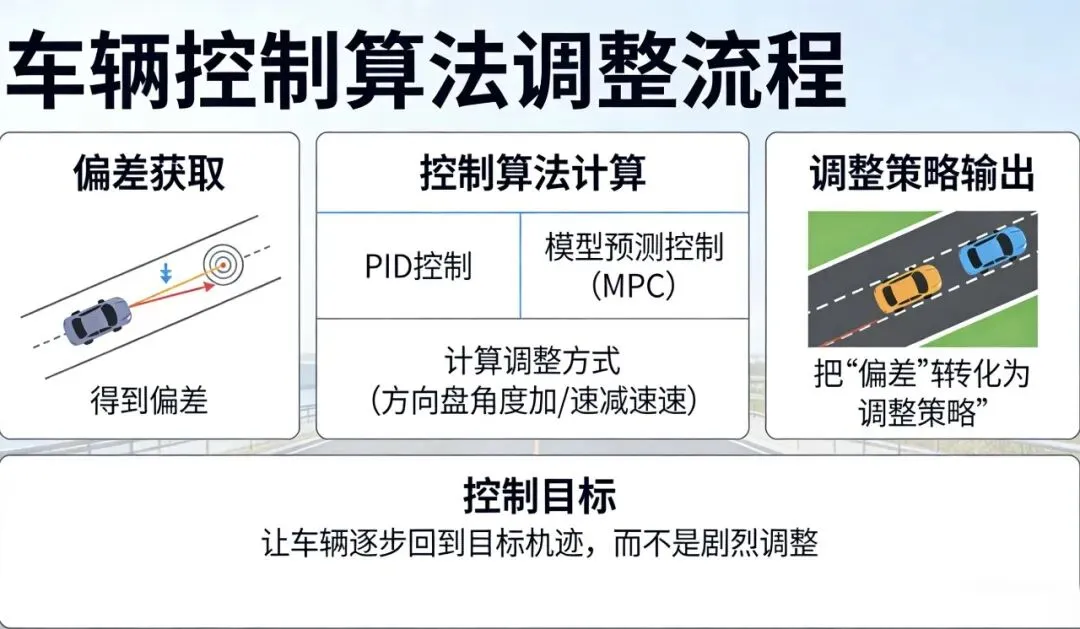
2. 控制计算(Control Algorithm)
在得到偏差之后,需要通过控制算法计算出调整方式,例如:
常见控制方式包括:
这些方法的目标是:让车辆逐步回到目标轨迹,而不是剧烈调整。
可以理解为:把“偏差”转化为“调整策略”。
3. 指令输出(Actuation)
最终,控制模块会输出具体指令到车辆执行系统,例如:
转向系统(方向盘角度)
动力系统(油门)
制动系统(刹车)
这些指令会直接作用在车辆上,产生实际运动。
可以理解为:把“计算结果”变成“物理动作”。
四、控制是如何基于规划结果工作的?
控制模块的输入主要来自规划模块,包括:
控制的基本流程可以概括为:
1. 接收目标轨迹:获取规划模块输出的轨迹信息。
2. 获取当前状态:通过车辆传感器获取当前状态,例如:
3. 计算误差:对比“当前状态”与“目标轨迹”,得到偏差。
4. 输出控制指令:通过控制算法生成→转向→加速→制动
并发送给执行系统。
五、控制模块的难点在哪里?
相比规划,控制的难点更多体现在“执行层面”,例如:
1. 车辆动力学限制
车辆并不能瞬间完成所有动作,例如:
2. 实时性要求高
控制系统需要在极短时间内完成计算并输出指令,否则会影响稳定性。
3. 稳定性与舒适性
需要避免:
在保证安全的同时,也要保证乘坐体验。
4. 外部扰动
例如:
这些都会影响控制效果。
六、控制与规划的关系
可以用一个简单关系来理解:
规划负责“给出理想轨迹”
控制负责“尽量实现这条轨迹”
如果规划是“路线设计”,那么控制就是“实际驾驶”,两者之间的差距,需要通过控制不断修正。

七、总结
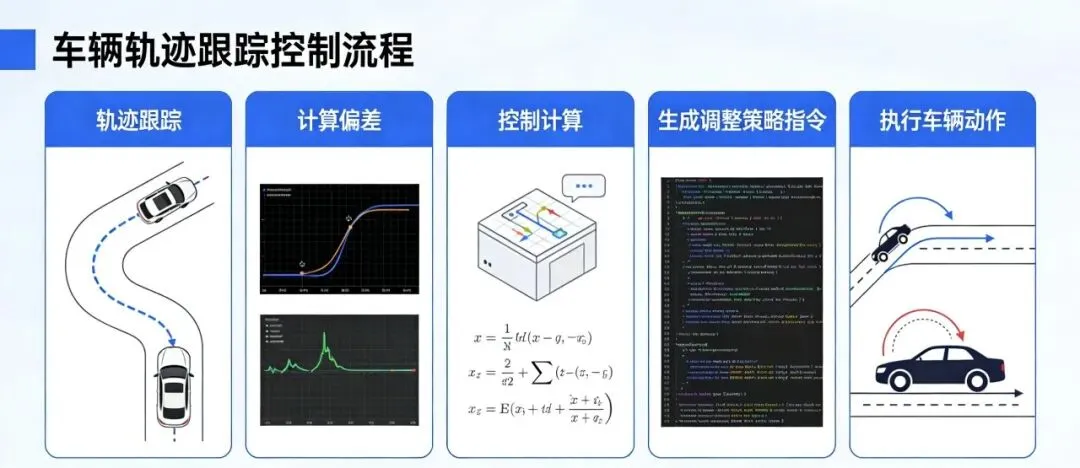
可以用一个简单结构来理解控制模块:
轨迹跟踪:计算偏差控制计算:生成调整策略指令输出:执行车辆动作
从整体流程来看:
规划输出轨迹 → 控制跟踪轨迹 → 车辆执行动作
控制模块的核心价值在于:将理论上的“规划结果”,转化为真实世界中的“车辆运动”。
如果你正在学习自动驾驶系统,建议在理解规划之后重点理解控制逻辑,因为它直接决定车辆的实际表现。




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
