很多人买车,一到智能驾驶环节就被销售绕晕:
张口就是“L2+级辅助驾驶”、激光雷达拉满、算力上千TOPS行业第一……
听得云里雾里,根本不知道真假好坏。
到底特斯拉、华为、小鹏这三家顶流的自动驾驶,核心区别在哪?
谁更安全?谁更实用?谁的路线能走到最后?
一、先扫盲!自动驾驶 L1-L4,一句话分清
很多人搞不懂自动驾驶的分级,其实核心就看一件事:
谁开车,谁担责。
不用汽车管销售、营销推广说的L2+、L2.9 这些噱头……
本质就4个等级,看完再也不会被绕进去:
① L1 辅助搭手:比如定速巡航,全程人开车、人负全责,系统只帮你踩个油门,连方向盘都不管。
② L2 人盯全程:比如高速跟车、车道保持,系统能帮你踩油门刹车、扶方向盘,但你必须全程盯着路、随时准备接手,出任何事故,都是人的责任。
③ L3 权责模糊的尴尬地带:限定场景(比如封闭高速)里系统能开车,但要求你随时待命、3秒内必须接手。一旦出事,是系统没开好,还是你没盯紧?责任根本扯不清,用户用着也纠结:到底我该不该握方向盘?
④ L4 彻底放手:全场景系统全程开车,人彻底不用盯路、不用管方向盘,哪怕你在后排睡觉都可以。出任何问题,都是车企和系统的责任,和驾驶员无关。
简单总结:
L2人为主、系统为辅;
L3一笔糊涂账;
L4系统为主、人彻底躺平。
二、一张表看懂!三家硬件核心差异,路线从硬件就定死了
自动驾驶的路线,从选硬件的那一刻就已经定了。
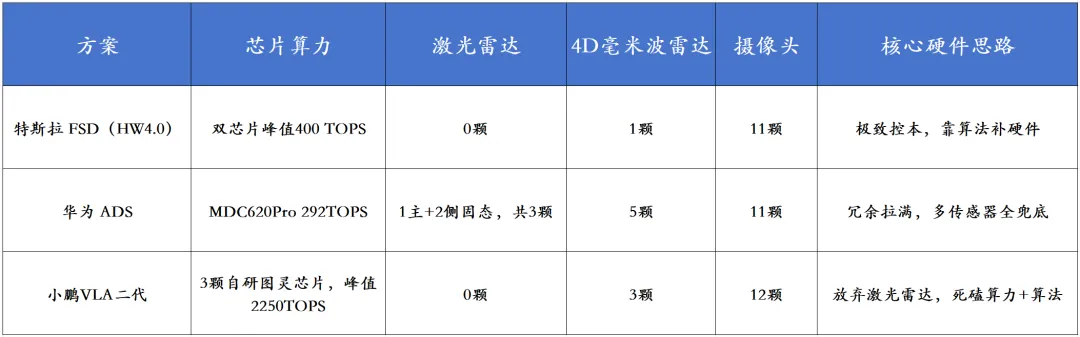
三家的硬件配置,直接把各自的思路摆到了台面上,核心差异全在下面这张表里:
看完表格,再用大白话拆解三家的硬件逻辑,你瞬间就懂了:
① 特斯拉:最会省钱,成本控制到极致
哪怕升级了 HW4.0,也只加了 1 颗 4D 毫米波雷达,坚决不用成本更高的激光雷达。核心目标非常明确:把高阶智驾的成本打下来,下放到 20 万以内的大众车型,靠规模化摊薄研发成本,让普通人都能买得起高阶智驾。
说白了就是:啥高端测距设备都不加,靠摄像头 + 算法控成本,走全民普及的路线。
② 华为:最求稳妥,硬件冗余全拉满
激光雷达、4D 毫米波雷达、摄像头全维度配齐,相当于给车装了 “普通眼睛 + 透视眼 + 测距眼”,多套设备互相补盲、语义级互补,实现全场景覆盖,不给极端场景留任何理论风险。
华为做通信出身,对 “靠谱” 的执念刻在骨子里,核心目标就是行车安全的绝对兜底,主打一个万无一失。
③ 小鹏:思路最特殊,剑走偏锋赌终局
坚决不加激光雷达,却保留 3 颗 4D 毫米波雷达做环境补盲;摄像头数量比华为还多 1 颗,同时把算力堆到了行业头部。
它的思路很明确:不靠昂贵的硬件兜底,靠超强的算力 + 底层算法搞定一切,赌的是 “AI 懂了物理规则,就能开好车”,直接瞄准 L4 终局。
三、为啥非要走三条不同的路?三家的终局目标
很多人会问:难道就没有一条 “最优路线” 吗?其实不是谁技术不行,而是三家的终局目标、商业逻辑,从一开始就完全不同。
① 特斯拉:目标是全民普及,靠规模化赚钱
马斯克的逻辑很简单:人靠两只眼睛就能开车,AI 只要数据够多,也一定能做到。如果每辆车加激光雷达,单车成本至少多 3000 块,200 万辆就是 60 亿,规模化普及就无从谈起。
它走的是 “车越多→数据越多→算法越强→买的人越多” 的正向循环,终极目标是让全球所有普通车型,都能用上高阶智驾。
② 华为:目标是极致安全,靠高端化站稳脚跟
华为做 To B 业务出身,对 “可靠性” 的要求刻在骨子里。在它的逻辑里,高阶智驾不能有短板,暴雨天、逆光夜路看不清,就不配叫高阶智驾。
所以它把所有能加的安全配置全配齐,先在高端市场站稳脚跟,把 “安全、靠谱” 的口碑打透,再逐步向下普及。
③ 小鹏:目标是终局超车,赌 L4 的先发优势
小鹏很清楚,论规模化比不过特斯拉,论高端品牌和硬件冗余比不过华为,想要超车,只能换一条赛道。
它赌的是 “AI 先懂世界规则,才是自动驾驶的终局”,跳过权责不清的 L3,直接冲 L4,只要率先实现全场景 L4 落地,就能实现弯道超车。
四、最终总结:没有绝对的好坏,只有适合不适合
三条路线没有绝对的高低之分,各自有适配的人群和场景:
如果你想买一台家用代步车,想要高性价比的高阶智驾,特斯拉的普及化路线更适合你;
如果你买车最看重安全,预算充足,想要全场景无死角的稳妥体验,华为的路线绝对不会出错;
如果你愿意尝新,想要提前体验更接近 L4 的智驾能力,愿意和品牌一起迭代,小鹏的路线会给你更多惊喜。
自动驾驶的终局,从来不是比谁的传感器多、谁的算力高,而是谁能最先让用户真正放心,敢把生命交给系统,同时还能让普通人买得起、用得上。
欢迎投票互动
欢迎在评论区留下你的选项,
真理总是越辩越明!
一起聊聊你对自动驾驶的看法!