自动驾驶与电动汽车的认知越狱:重写[组件优化]的源代码与[系统信息学]的生存算法
导言:一场针对“常识”的外科手术我们对电动汽车(EV)的理解,大部分是错误的。我们被续航里程、充电速度和百公里加速这些消费级指标所催眠,误以为它只是一辆“装了大电池的汽车”。这是一种危险的认知降维。这本由Yue Cao、Yuanjian Zhang和Chenghong Gu编辑的学术合集《Automated and Electric Vehicle: Design, Informatics and Sustainability》,尽管披着一本工程教科书的枯燥外衣,其真正的功能却是一把锋利的手术刀。它剖开车辆的物理外壳,暴露其内部真正的主宰者:一个由控制论、信息学和可持续性目标驱动的、复杂到令人不安的软件生命体。这本书无意取悦读者,它的使命是强行执行一次认知升级,迫使你放弃“硬件中心论”,承认一个残酷的事实:未来的汽车工业,本质上是软件和数据科学。这篇解析不是书评,而是一份认知战场地图,我们将一同拆解这本书构建的精密战争机器,看它如何向行业旧有的惰性思维开战。
本书目录(认知重构路径)第1章 破局:逃离“带轮子的电池”认知陷阱第2章 思想谱系:控制论幽灵与汽车工程师的百年战争第3章 源代码(上):能量管理系统(EMS)的“经济学”与“政治学”第4章 源代码(中):电池管理系统(BMS)的“生命体征监控”与“宿命预测”第5章 源代码(下):从预测到规划,自动驾驶幽灵的经济学前奏第6章 角斗场(上):规则派 vs. 优化派 —— 控制策略的内战第7章 角斗场(下):V2G 与 AVP —— 乌托邦构想的冷酷成本核算第8章 算法化:工程师的生存清单与决策者的避坑指南第9章 遗产生态:这本书的“半衰期”——在深度学习浪潮下的位置第10章 终局:从“智能车”到“能源互联网的神经元”
第1章 破局:逃离“带轮子的电池”认知陷阱
大众对电动汽车的想象力贫瘠得可怜。他们谈论的,无非是特斯拉的屏幕、比亚迪的刀片电池,或是某个新势力夸张的自动驾驶宣传片。这些讨论都停留在“物”的层面,将电动汽车视为一个孤立的、由硬件堆砌而成的产品。这正是本书无声批判的第一个认知谬误。书中几乎没有一章在孤立地谈论某个硬件,无论是电池、电机还是传感器。相反,它强迫我们将视线从这些闪亮的物理组件上移开,转向那些无形但致命的控制逻辑。从第一章“Energy Efficient Control of Vehicles”开始,一个清晰的信号就被释放出来:战争的焦点已经转移。真正的战场不在于电池能量密度能再提升百分之几,而在于你如何通过软件,像一个吝啬的金融家一样,管理和调度车上每一个焦耳的能量。这本书的破局之处,在于它用压倒性的技术细节证明,电动汽车的灵魂是“信息学”(Informatics),其核心竞争力是“可持续性”(Sustainability)下的能源调度算法,而“设计”(Design)早已不再是外壳的曲线,而是控制架构的拓扑结构。它将一辆车从一个牛顿力学框架下的“机械装置”,重新定义为一个信息论和控制论框架下的“动态系统”。逃离“带轮子的电池”这一认知陷阱,是理解未来十年汽车工业所有变革的唯一入口。
第2章 思想谱系:控制论幽灵与汽车工程师的百年战争
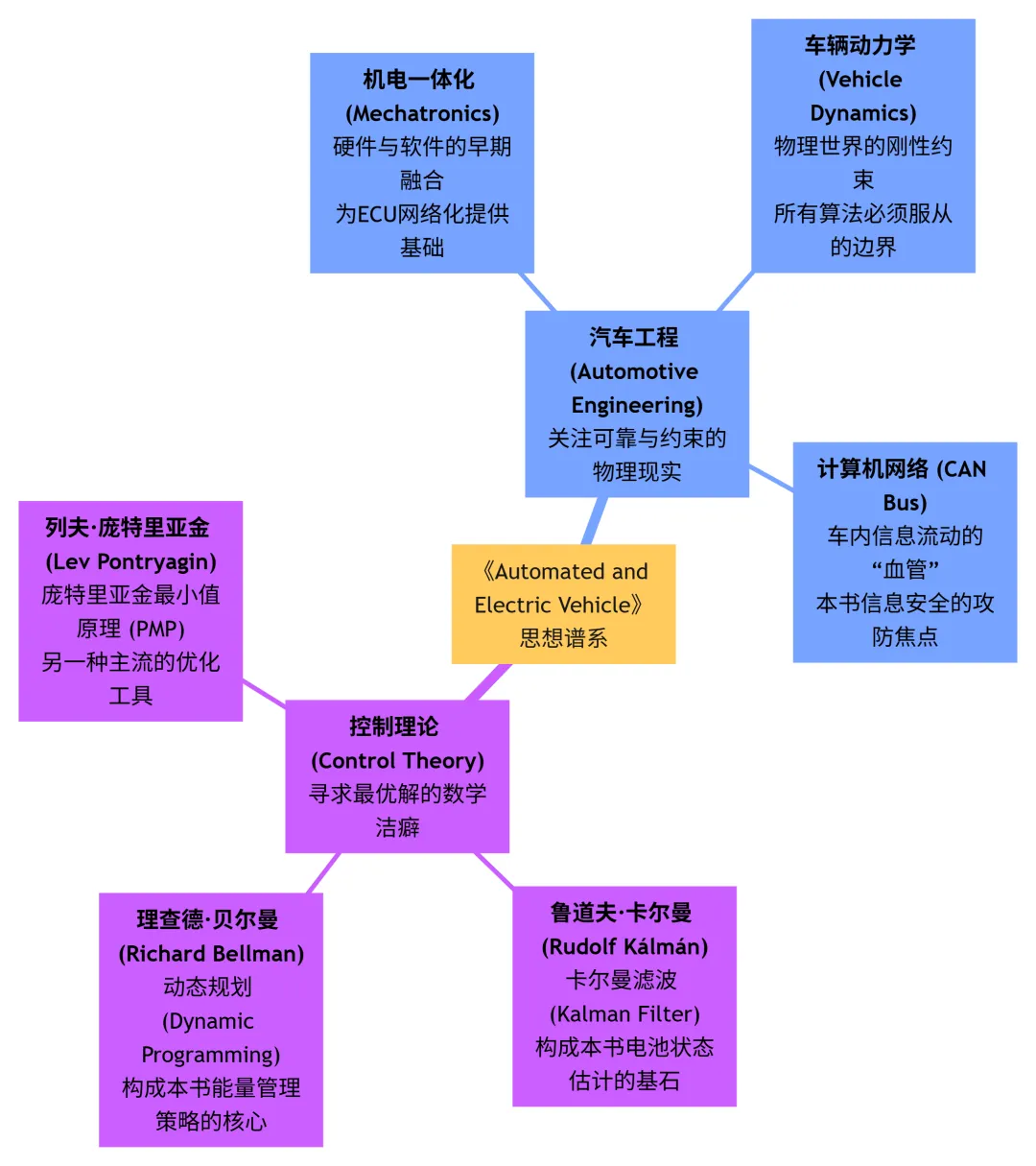
要理解这本书的架构,必须先绘制出其背后的思想谱系。它并非凭空出现,而是控制论这只“幽灵”在汽车工业这个百年战场上的最新一次显形。这本书本质上是两股强大思想力量的合流产物。
第一股力量,源自20世纪中叶的控制理论黄金时代。理查德·贝尔曼的动态规划(Dynamic Programming)为我们提供了一种“上帝视角”,通过反向递推求解多阶段决策问题,找到全局最优解。这正是本书中能量管理策略(EMS)的理论巅峰。同样,鲁道夫·卡尔曼的卡尔曼滤波(Kalman Filter)则成为在充满噪声的测量数据中(例如电池的电压和电流)估计系统真实状态(荷电状态,SOC)的终极武器。这些数学工具带有强烈的“计划经济”色彩:只要模型精确、计算力足够,就能达到理论上的完美。
第二股力量,则是汽车工业自身百年演化出的“经验主义”和“可靠性工程”。从CAN总线的诞生到各种电子控制单元(ECU)的分布式部署,汽车工程师们建立了一套“去中心化”的、基于规则的、容错性极强的控制体系。他们不追求虚无缥乙的“全局最优”,而是信奉“足够好”且“绝对不能失效”的现场法则。
这本书,正是这两股力量的交锋与融合。它试图用控制理论的数学严谨性,去升级和取代传统汽车工程的经验法则。这种尝试充满了张力,也预示了未来工程师所需具备的认知分裂:既要能推导复杂的非线性优化模型,又要能理解这些模型在现实世界的泥泞中会如何失效。
第3章 源代码(上):能量管理系统(EMS)的“经济学”与“政治学”
如果说电动汽车是一个小型“城邦”,那么能量管理系统(EMS)就是它的中央银行和计划委员会。它的唯一任务,是在满足驾驶员动力需求(“民生”)的前提下,以最低的成本(燃油或电量消耗、电池损耗)调度能量资源(发动机、电机、电池)。第1章“Energy Efficient Control of Vehicles”深入剖析了这场资源调度战争的两种核心哲学。
3.1 能量调度的“经济学”:成本函数的确立
EMS的核心,不是硬件,而是一个成本函数 J。J = f(fuel, electricity, degradation, emission, ...)。这个函数定义了什么是“好”的能量策略。这本书展示了学术界如何精密地构建这个函数。传统的EMS只关心燃油或电量消耗,这是一个简单的单目标优化问题。但现代EMS必须成为一个多目标“经济学家”,它需要权衡:
- 短期成本
- 长期成本:电池的充放电循环深度(DOD)和倍率(C-rate)对寿命的损耗。
- 外部性成本
- 机会成本:在V2G(Vehicle-to-Grid)场景下,现在用掉的电,是否意味着错过了未来电价更高时卖给电网的机会?
表1:EMS成本函数维度的演化
| | | |
|---|
| 核心目标 | | | |
| 关键变量 | Fuel_Consumption(t) | Fuel(t) + α*Degradation(t) + β*Emission(t) | System_Cost(t) = f(Grid_Load, EV_Fleet_SOC, ...) |
| 决策依据 | | | |
| 复杂度 | | | |
这本书的价值在于,它系统性地将“电池损耗”等长期成本用数学模型量化,并纳入成本函数。这标志着EMS的设计思路从“战术级”的瞬时节油,跃迁到“战略级”的全生命周期资产管理。
3.2 控制策略的“政治学”:中央集权 vs. 地方分权
如何求解这个复杂的成本函数?这里出现了“政治学”上的路线斗争。
- 中央集权(基于优化的策略):以**动态规划(DP)**为代表。它假设我们预知了未来整个驾驶行程(“完整的五年计划”),然后从终点倒推,为每分每秒计算出最优的能量分配方案。这是理论上的“绝对正确”,但它要求“全知全能”——既要知道未来,又要不计成本地计算。这在现实中几乎不可能,因此DP主要作为“上帝基准”,用于离线评估其他次优策略的好坏。
- 地方分权(基于规则的策略):这是工业界的主流。它不追求全局最优,而是制定一系列“如果...那么...”的规则(If-Then rules)。例如:“如果SOC高于80%且需求扭矩不大,则纯电驱动;如果SOC低于30%,则启动发动机充电”。这些规则就像地方政府的行政命令,反应迅速,鲁棒性强,但无法保证整体效率最高。
书中花了大量篇幅介绍介于两者之间的“混合政体”,例如等效消耗最小策略(ECMS)和模型预测控制(MPC)。ECMS试图用一个“等效因子”来估算电池电能的未来价值,从而将长期问题简化为瞬时优化。MPC则是在每个时刻,对未来一小段时间(比如30秒)进行滚动优化,试图在“远见”和“计算可行性”之间取得平衡。这场“政治”斗争,至今仍在继续。
第4章 源代码(中):电池管理系统(BMS)的“生命体征监控”与“宿命预测”
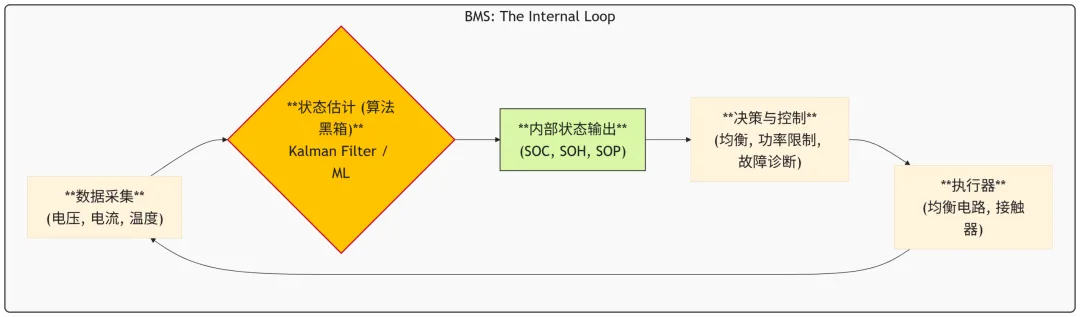
如果EMS是中央银行,那么电池管理系统(BMS)就是ICU里的生命体征监控仪和末期病患的预后评估医生。它的职责看似简单:监控、保护、均衡。但正如第2章“Battery Management System of Electric Vehicle”所揭示的,BMS处理的是一个信息严重不对称的“黑箱”问题,它面对的不是一个确定性的机器,而是一个不断衰老、状态模糊的“电化学生命体”。
4.1 监控的困境:不可见的内部状态
BMS能直接测量的物理量只有三个:电压、电流、温度。但决策者(EMS或驾驶员)真正关心的核心状态,却全是不可直接测量的:
- 荷电状态 (State of Charge, SOC):电池还剩多少电?它不是一个简单的油表,电压与SOC的关系呈高度非线性,且受到温度、老化程度、放电倍率的严重影响。
- 健康状态 (State of Health, SOH):电池老化了多少?容量衰减了多少?内阻增加了多少?这是一个更难预测的长期变量。
- 功率状态 (State of Power, SOP):电池在下一秒还能提供多大功率?这决定了车辆的加速性能和能量回收能力。
BMS的工作,本质上是一个基于外部观测数据,对系统内部隐变量进行估计的典型问题。这本书系统梳理了解决这一问题的几种核心算法武器库。
表2:SOC估计算法的“黑箱”破解术对比
| | | |
|---|
| 开路电压法 (OCV) | 静置足够长时间后,电池端电压与SOC有稳定对应关系。 | | 无法在线使用;需要漫长的静置,车辆行驶中电压是动态的。 |
| 安时积分法 (库仑计) | 对流入/流出的电流进行时间积分。SOC(t) = SOC(0) - ∫I(t)dt / C | | 初始SOC难以准确获知;电流传感器存在累计误差,长期运行后“漂移”严重。 |
| 卡尔曼滤波 (Kalman Filter) | 融合“模型预测”与“测量更新”。用电池模型预测下一刻状态,再用实际测量值去修正预测。 | | 依赖精确的电池等效电路模型;计算量大;对非线性系统需使用扩展卡尔曼(EKF)或无迹卡尔曼(UKF),增加了复杂性。 |
| 数据驱动法 (AI/ML) | 使用神经网络等模型,直接学习输入(V, I, T)到输出(SOC)的映射。 | | 需要海量训练数据;模型的可解释性差(“黑箱”中的“黑箱”);鲁棒性和泛化能力是巨大挑战。 |
4.2 均衡的艺术:木桶效应的管理
一个电池包由成百上千个电芯串并联而成。根据“木桶效应”,整个电池包的性能取决于最差的那个电芯。即使出厂时电芯高度一致,微小的制造差异、不均匀的温度分布,都会导致它们在循环过程中出现衰减不一致。一个电芯“掉队”,就会成为整个系统的瓶颈。BMS的“主动均衡”和“被动均衡”功能,就是试图解决这个问题的“财富再分配”系统。被动均衡通过给电压高的电芯并联一个电阻放电(“劫富”),来等待电压低的电芯充满。主动均衡则通过复杂的电路,将能量从电压高的电芯转移给电压低的(“劫富济贫”)。这种管理的精细程度,直接决定了电池包的实际可用容量和寿命。这本书虽然没有深入均衡电路的硬件细节,但它在架构层面点明了BMS从一个纯粹的“保护板”,进化为一个主动的“资产管理器”的必然趋势。
第5章 源代码(下):从预测到规划,自动驾驶幽灵的经济学前奏
第3章“Speed Forecasting Methodology”和第4章“Eco-Driving Behavior of Automated Vehicle”将我们带入了更深的未来。如果说EMS和BMS是对车辆“内部状态”的管理,那么这些章节则探讨了如何通过预测“外部世界”来反向优化内部的能量策略。这不仅是节能技术,更是自动驾驶时代来临前,车辆“经济大脑”的早期预演。
5.1 预测:为车辆安装“水晶球”
传统的Eco-Driving(节能驾驶)依赖于驾驶员的“黄金右脚”,本质是一种被动的、滞后的响应。而本书所探讨的现代Eco-Driving,核心在于预测。车辆不再是一个盲目执行当前指令的机器,它开始试图“看见”未来。
- 看见交通流:通过V2X(车联网)通信,提前知道前方路口的红绿灯状态(Signal Phase and Timing, SPAT)、前方车辆的加减速意图。
- 看见道路
- 看见驾驶员意图
这些预测信息,使得EMS的优化从“基于过去”升级为“基于未来”。例如,如果预测到前方1公里处即将变红灯,一个聪明的Eco-Driving系统会立即停止能量输出,让车辆以最大动能回收效率滑行过去,而不是冲到路口再一脚急刹,将宝贵的动能浪费在刹车片上。
表3:速度预测方法的流派
| | | |
|---|
| 基于模型的预测 | 使用物理或数学模型(如Markov链)描述速度转移的概率。 | | |
| 数据驱动的预测 | 使用机器学习(如RNN, LSTM)从历史数据中学习速度序列的模式。 | | 依赖高质量、大规模的数据;对未见过的工况泛化能力存疑。 |
| 指数变化预测 | 极简模型,假设未来速度是当前速度的指数函数 v(k+i) = v(k)*(1+ε)^i | | |
5.2 规划:从速度曲线到成本曲线
一旦拥有了预测能力,车辆的行为就从“驾驶”(Driving)升维为“规划”(Planning)。第4章提出的基于MPC的生态驾驶行为规划,就是这种升维的体现。它在每个决策点,都会解决一个优化问题:在未来N秒内,综合考虑节能、舒适、安全、通行时间等多种目标,我应该遵循一条什么样的速度曲线?这本质上是将驾驶行为,翻译成了一个多目标的经济学优化问题。一条速度曲线,就对应着一条成本曲线。这个“经济大脑”的出现,意义深远。它意味着车辆的决策逻辑,已经开始超越简单的“A点到B点”的物理任务,而是在一个更大的系统中(交通系统、能源系统)寻求自身的成本最优。这是通往完全自动驾驶(当安全问题被解决后,经济性将成为核心议题)的必经之路。
第6章 角斗场(上):规则派 vs. 优化派 —— 控制策略的内战
本书最核心的智力冲突,潜藏在对能量管理策略的论述中。这是一场旷日持久的“内战”,参战双方分别是规则派(Rule-Based)和优化派(Optimization-Based)。这场战争不仅是技术路线之争,更是两种世界观的对决:一种是拥抱现实复杂性的“经验主义”,另一种是追求理论完美的“理性主义”。
6.1 规则派:战地医生的现实主义
规则派的拥护者主要是整车厂的量产工程师。他们的首要目标是鲁棒性(Robustness)。系统绝对不能在任何意想不到的工况下崩溃。他们就像战地医生,追求的不是完美的手术,而是快速、有效、在最恶劣环境下也能完成的包扎。
- 武器:逻辑门限(Thermostat Strategy)、状态机控制(State Machine Control)。这些策略的本质是大量的
IF-THEN-ELSE语句,将复杂的驾驶工况简化为几个离散的状态。 - 优点:计算量极小,可以轻松跑在廉价的ECU上;逻辑清晰,易于标定和测试;行为可预测,没有“惊吓”。
- 缺点:他们是“近视眼”。所有决策都基于当前时刻的几个变量(车速、SOC、踏板开度),缺乏对未来的预判。因此,其策略必然是次优的。比如,在即将上一个大坡前,一个基于规则的混动系统可能会用光电池的电,然后在爬坡时被迫高负荷启动发动机,油耗和体验都极差。
6.2 优化派:学院派的乌托邦
优化派的主力是大学教授和前沿研究者,本书的作者们显然属于这个阵营。他们追求的是最优性(Optimality)。他们试图构建一个完美的数学模型,找到理论上的能耗最小值。
- 武器:动态规划(DP)、庞特里亚金最小值原理(PMP)、模型预测控制(MPC)。这些是控制理论中的“重型武器”。
- 优点:他们是“远视眼”。DP能提供全局最优的“上帝视角”,作为所有其他策略的性能标杆。MPC则提供了在现实中应用这种“远见”的可能。
- 缺点:他们的“阿喀琉斯之踵”是对模型的依赖和巨大的计算量。DP需要预知全程工况,这在现实中不可能。MPC虽然是滚动优化,但在复杂城市路况下,其计算量和对短期预测精度的敏感性,依然是部署在量产车上的巨大挑战。
表4:控制策略的“世界观”对决
| | 优化派 (Mathematical Idealism) |
|---|
| 世界观 | | |
| 核心诉求 | | |
| 决策视野 | | |
| 知识来源 | | |
| 主要战场 | | |
| 代表人物 | | |
这场内战没有终局。未来的趋势是融合。正如**吴军在《智能时代》**中提到的,大数据+机器学习正在成为新的“规则”来源。未来的能量管理,可能是一个由离线全局优化(DP)训练出的深度神经网络,它在车端以规则的形式运行,兼具了优化派的“智慧”和规则派的“高效”。这本书为我们清晰地勾勒出了这场战争的版图和双方的军备。
第7章 角斗场(下):V2G 与 AVP —— 乌托邦构想的冷酷成本核算
当车辆的“智能”溢出自身边界,开始与外部系统深度交互时,我们就进入了本书最具未来感,也最具争议的领域:车对网(Vehicle-to-Grid, V2G)和自主代客泊车(Autonomous Valet Parking, AVP)。这些章节(如第5章、第10章)描绘了一幅激动人心的技术乌托邦图景,但如果我们用**纳西姆·塔勒布在《反脆弱》**中倡导的批判性思维来审视,就会发现隐藏在美好愿景之下的冷酷成本。
7.1 V2G:你是资产,还是耗材?
V2G的构想极具诱惑力:将数百万辆闲置的电动汽车连接到电网,形成一个巨大的分布式储能系统。在用电低谷时充电,在高峰时向电网放电,车主可以从中赚取差价,电网也获得了宝贵的调峰能力。第10章“A Review of the Trends in Smart Charging, Vehicle-to-Grid”就对此进行了综述。
然而,这场看似双赢的游戏,忽略了一个致命的成本:电池损耗。 V2G的本质,是增加了电池的额外充放电循环。而每一次循环,都在不可逆地消耗电池的寿命。车主赚取的电价差,能否覆盖电池加速老化带来的资产贬值?这是一个极其敏感的经济学问题。
- 乐观者的计算:只计算电价差收益,得出每年数百甚至上千英镑的可观收入。
- 悲观者(或现实主义者)的计算:引入电池循环寿命模型。一块价值数万元的电池,其总循环寿命可能是2000-3000次。V2g带来的额外循环,等于直接消耗了这块“固定资产”的折旧。书中引用的研究表明,计入合理的电池退化成本后,V2G的利润空间被急剧压缩,甚至变为负值。
塔勒布会说,V2G的支持者们犯了一个典型的“火鸡谬误”:他们在感恩节前的1000天里,每天观察到自己被喂食,从而得出“人类是朋友”的结论,并预测明天会得到更多食物。他们没有看到那个隐藏的、非线性的、致命的风险——感恩节本身。V2G的“感恩节”,就是当车主发现,为了每年几十块钱的蝇头小利,他的电池在保修期外提前报废的那一天。
7.2 AVP:便利的幻觉与系统总成本的转移
自主代客泊车(AVP),尤其是第5章讨论的长距离AVP(LAVP),将用户从“找车位”的痛苦中解放出来。你在商场门口下车,车辆自己去找几公里外的停车场。这听起来是终极的便利。
但这种便利并非没有代价,它只是将成本进行了转移:
- 从用户时间成本 -> 车辆的“空驶”能耗成本:车辆需要自己行驶到停车场再回来,这部分能耗由谁承担?
- 从私人成本 -> 公共成本:大量自动驾驶车辆在城市中低速“巡航”寻找车位或前往接驳点,会额外占用宝贵的道路资源,加剧交通拥堵。这是一种典型的“公地悲剧”。
- 从简单问题 -> 复杂调度问题:AVP需要一个强大的中央调度中心(Scheduling Centre)来分配车位、规划路径。这个中心的建设和运营成本,最终会以服务费的形式转嫁给用户。
正如**简·雅各布斯在《美国大城市的死与生》**中批判城市规划的宏大蓝图一样,这种看似高效的集中式解决方案,往往会破坏城市自组织的复杂生态。AVP创造的便利,可能只是一个局部最优的幻觉,其代价是系统总成本的增加和城市交通活力的下降。这本书忠实地呈现了这些技术的潜力,但作为批判性的读者,我们必须看透便利背后的成本转移。
第8章 算法化:工程师的生存清单与决策者的避坑指南
学术著作的价值不在于其结论,而在于其思维模型的可移植性。我们将这本书复杂的算法和模型,压缩成一份可执行的“生存清单”,服务于两类人:一线工程师和技术决策者。这份清单不是为了复制书中的具体代码,而是为了内化其解决问题的元算法。
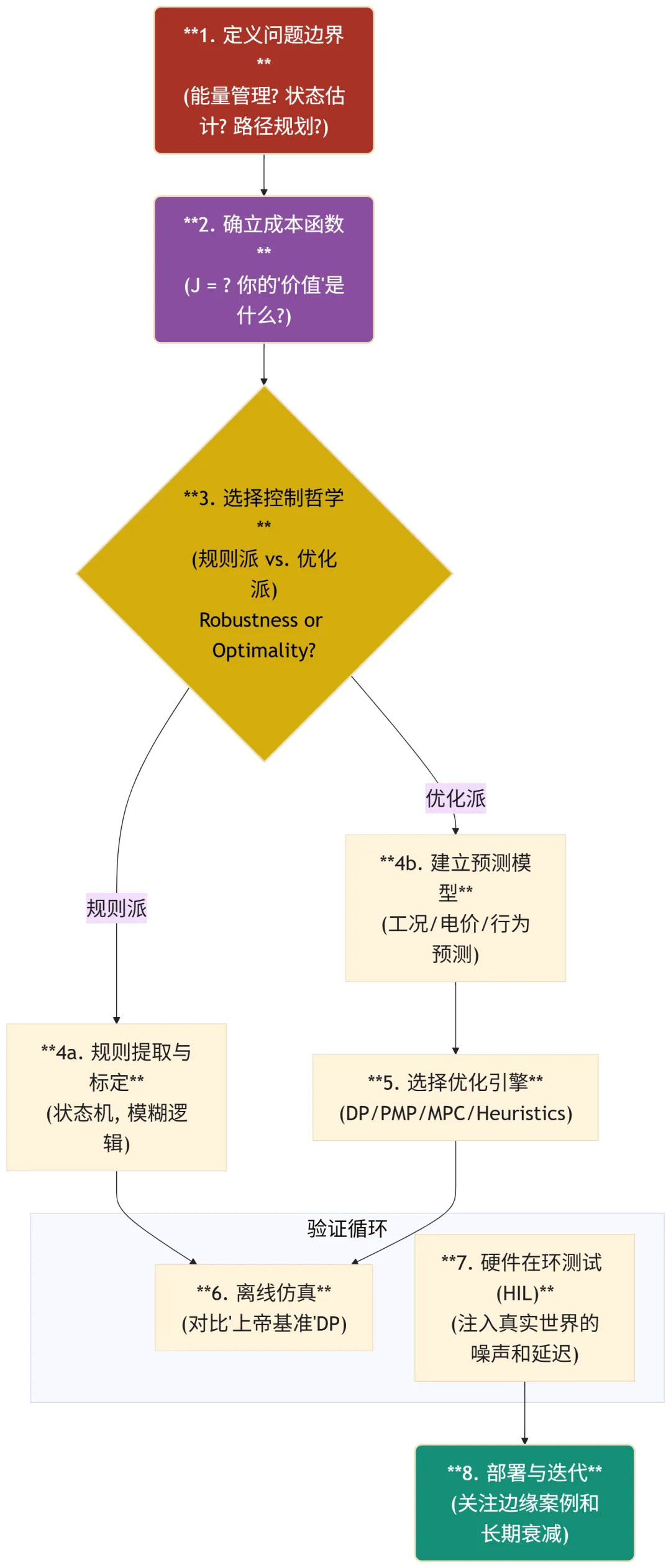
8.1 工程师生存清单:从建模到部署的8个步骤
这份流程图,是本书隐含的工程方法论。每一个环节都是一个决策点,也都是一个潜在的失败点。
- 步骤2(成本函数)是灵魂:如果你的成本函数只考虑电耗,你可能会毁掉电池。如果你的成本函数过于复杂,你可能永远无法实时求解。
- 步骤3(哲学选择)是站队:选择规则,你选择了99%的可靠和80%的性能。选择优化,你可能得到100%的性能,但也可能在某个时刻得到0%的可靠性。
- 步骤7(硬件在环)是唯一真相:纯软件仿真永远是乐观的。只有将算法部署在真实的ECU硬件上,与真实的物理信号交互,才能暴露其在时序、延迟和计算精度上的脆弱性。
8.2 决策者避坑指南
表5:技术决策者的“反向指标”检查表
| 常见的“美好叙事” (The Narrative) | 你应该反向质问的问题 (The Unasked Question) | |
|---|
| “在电池低温和剧烈老化的边缘工况下,你的模型误差是多少?累计误差如何修正?模型的可解释性是什么?” | |
| “这是基于哪个已知的驾驶循环(NEDC? WLTC?)?在随机城市交通流下的真实节油率是多少?算法对工况预测错误的鲁棒性如何?” | |
| “这个计算是否包含了电池循环寿命损耗的资产折旧?使用的电池成本模型是多少?考虑了充放电机和通信的额外硬件成本吗?” | |
| “系统带来的空驶里程增加了多少总能耗?对城市公共道路资源的额外占用如何量化?调度中心的建设和运营成本是多少?” | |
| “这是离线计算出的理论最优,还是可以在车端实时计算的最优?当系统规模(车队数量)扩大10倍时,你的计算复杂度如何增长?” | |
这份指南的核心思想,源自查理·芒格的“逆向思维”。不要问“它如何成功”,要问“它最可能在哪个环节以何种方式失败”。决策者的工作不是被PPT上的最佳性能数据所迷惑,而是要疯狂地攻击系统的每一个假设,找到其脆弱的边界。
第9章 遗产生态:这本书的“半衰期”——在深度学习浪潮下的位置
任何一本技术书籍都有其“半衰期”。对于这本2023年出版的著作,我们必须冷酷地评估:在以GPT为代表的深度学习和生成式AI浪潮面前,它所记述的知识体系,有多少会迅速过时,又有多少会成为更高级智能的基石?
9.1 被“降维打击”的领域
书中某些章节,正处在被颠覆的前夜。
- 基于模型的预测:第3章中提到的Markov链等预测方法,本质上是用简化的数学模型去拟合复杂的现实。这种方法在更强大的、能够直接从海量数据中学习深度模式的**深度学习模型(如LSTM、Transformer)**面前,显得笨拙而低效。只要有足够多的驾驶数据,一个深度神经网络在速度预测上的精度,几乎必然会超越Markov模型。前者是“看图说话”,后者是“总结语法”,在图像和序列任务上,前者的优势是压倒性的。
- 需要人工特征工程的状态估计:传统的卡尔曼滤波,其性能高度依赖于工程师能否建立一个精确的电池“等效电路模型”(ECM)。这需要大量的实验和专业知识,是一种典型的人工特征工程。而端到端(End-to-End)的深度学习方法,则试图跳过这个中间步骤,直接从原始的电压、电流数据中,学习到SOC的估算模型。虽然目前在鲁棒性和可解释性上仍有挑战,但其潜力巨大。
9.2 成为“API”的永恒遗产
然而,这本书的核心思想并不会过时,它们只会改变存在的形态,从“显式算法”变为更上层模型的“隐式约束”或“API调用”。
- 成本函数成为高级AI的“价值观”:无论未来的AI多么强大,它依然需要一个目标。EMS中的成本函数J,正是这个目标。
J = f(能耗, 损耗, 安全, 时间...),这个函数定义了AI的“价值观”。AI的任务是优化这个函数,但定义函数的权利,依然掌握在人类工程师手中。这本书关于如何构建多目标成本函数的论述,将具有长久的生命力。 - 物理模型成为AI的“第一性原理”:AI不能凭空创造物理规律。电池的电化学反应、车辆的动力学约束,是不可逾越的“铁律”。书中建立的这些物理和半物理模型,将成为未来AI模型的“物理信息神经网络(Physics-Informed Neural Networks, PINN)”的一部分。AI的学习不再是无约束的黑箱拟合,而是在物理定律的边界内进行。这能极大地提高模型的泛化能力和数据效率。
- 优化理论成为系统架构的“语法”:动态规划、MPC这些优化思想,即使其具体算法不再被直接执行,它们所代表的“多阶段决策”、“滚动优化”等架构思想,依然是构建复杂智能系统的核心“语法”。未来的车辆大脑,可能是一个分层的架构:底层是基于规则和物理模型的快速响应单元,中层是进行短期战术规划的MPC,顶层则是由大模型驱动的长期战略决策。
结论:这本书并没有给我们最终的答案,但它清晰地定义了问题,并提供了第一代解决这些问题的精密工具。在AI浪潮下,这些工具的部分“零件”会被替换,但其“设计图纸”——即背后的控制思想和系统架构,将作为不朽的遗产,继续存在于下一代智能系统的基因之中。
第10章 终局:从“智能车”到“能源互联网的神经元”
合上这本书,我们得到的最终图景,远比“一辆更聪明的电动车”要宏大。这本书的所有章节,从能量控制到V2G,都在指向一个共同的终局:车辆正在从一个孤立的交通工具,进化为未来城市能源与信息网络中的一个可移动、可交互的“神经元”。
这个“神经元”具有几个关键特征:
- 感知能力 (Sensing):通过自身传感器和V2X网络,感知交通、电网和环境信息。
- 计算能力 (Computing):通过内部的ECU和云端大脑,执行复杂的预测和优化算法(本书的核心内容)。
- 执行能力 (Actuating):调节自身的充放电行为,不仅是为了移动,也是为了响应更大系统的需求。
当数以百万计这样的“神经元”被连接起来,一个前所未有的“车轮上的互联网”就诞生了。在这个终局图景中,我们面临的挑战也完全不同了。
表6:视角转换:从“车”到“神经元”
| | |
|---|
| | |
| | |
| 如何让所有自动驾驶车辆协同博弈,避免“合成谬误”(局部最优导致全局更差)? | |
| | |
这本书为我们设计“神经元”的内部工作机制提供了坚实的理论基础。但真正的终局之战,将在“神经元”之上的网络层面展开。这需要我们引入全新的知识武器:博弈论(用于设计市场机制,引导车主参与)、群体智能(用于实现车队的自组织协同)、复杂网络理论(用于分析系统的脆弱性和鲁棒性)。
对读者的最终挑战:不要停留于学习书中的某个具体算法。把它当作一个思维的跳板,开始思考:当你手中掌握着百万个这样拥有感知、计算和执行能力的移动节点时,你能构建一个怎样的未来?你将如何设计规则,让这些自利的“神经元”的个体行为,最终涌现出对整个系统有利的宏观秩序?
这不再是一个纯粹的工程问题,它关乎经济、社会,甚至哲学。这才是这本技术手册背后,最激动人心的终极命题。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
