清华大学曲小波教授团队:面向自动驾驶模块化公交对接场景的激光雷达-惯性导航融合SLAM框架
- 2026-05-13 08:42:58

清华大学曲小波教授团队:面向自动驾驶模块化公交对接场景的激光雷达-惯性导航融合SLAM框架
清华大学曲小波教授领衔的智能交通实验室,在期刊Green Energy and Intelligent Transportation发表了题为“LiDAR-IMU SLAM Framework in Autonomous Modular Bus Docking Systems”的研究论文。文章针对自动驾驶模块化公交(Autonomous Modular Bus)对接过程中的精准定位难题,提出了一种增强型激光雷达-惯性导航融合SLAM框架。该方法在单车运行场景下的定位精度相比现有主流算法显著提升,垂直方向定位偏移问题得到有效解决。在双车对接场景中,通过智能识别前车并滤除干扰信息,成功克服了前车遮挡导致的定位失准问题,为自动驾驶模块化公交系统的落地应用提供了重要技术支撑。
研究背景
随着城市交通压力不断增大,自动驾驶模块化公交作为新兴的智能交通解决方案正受到广泛关注。这种公交系统允许多个车厢模块在行驶过程中灵活对接编组或分离,可以实现乘客不下车换乘,大幅提升出行效率和乘客体验。然而,要实现车辆间的精准自动对接,面临着图1所示的两大技术挑战:首先是定位精度要求极高,不仅需要在水平面上准确定位,更要确保垂直方向的稳定性,避免高度偏差影响对接机构的正常工作;其次是在近距离对接过程中,前车会对后车的激光雷达传感器造成持续遮挡,干扰环境感知和定位计算。现有的激光雷达定位算法虽然在常规驾驶场景下表现良好,但在应对垂直定位偏移和传感器受近处持续动态遮挡等复杂情况时仍存在不足。
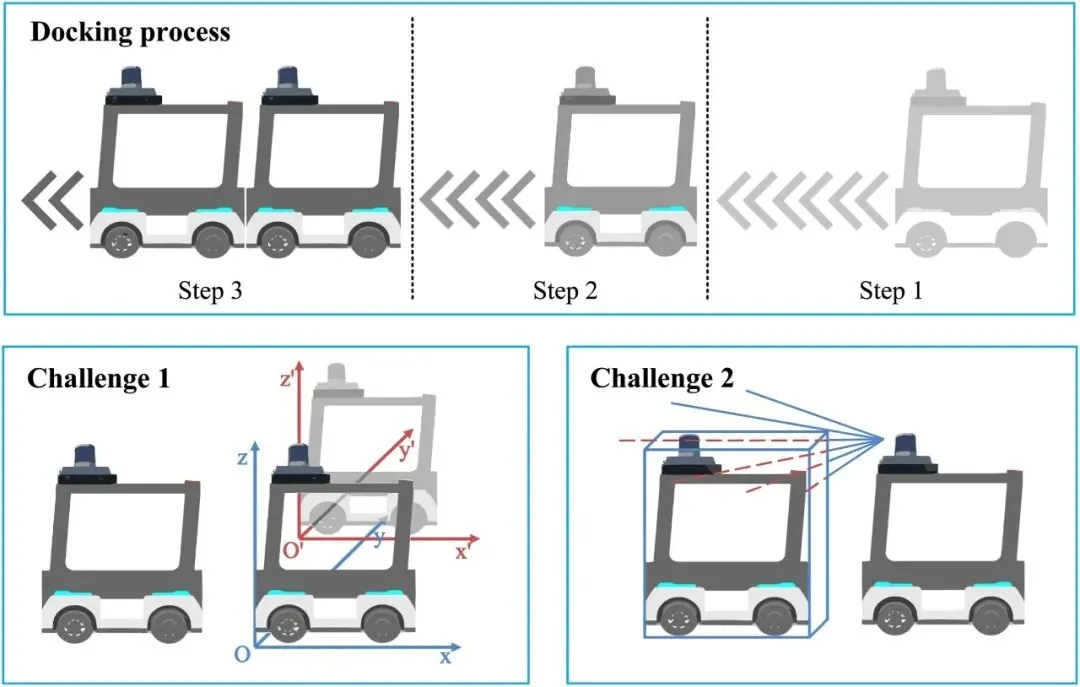
图1. 模块化公交对接过程示意及其两大技术挑战
文章简介
01 | 技术原理 |
文章提出的增强型SLAM框架采用“分阶段优化”的设计思路,整体工作流程如图2所示,通过三个核心技术创新来解决模块化公交自动对接中的定位难题。
一、两阶段地面约束匹配算法。传统方法往往将所有特征点一起处理,容易在垂直方向累积误差。新方法将定位过程分为两个阶段:第一阶段针对性利用地面特征点来确定车辆的高度、横滚角和俯仰角,确保车辆始终“贴合”地面基准;第二阶段利用其他环境特征来优化水平位置和航向角。这种先垂直后水平的策略有效抑制了垂直方向定位偏移。
二、智能因子图优化策略。系统会周期性地重置历史约束信息,防止长期累积误差影响当前定位精度,同时融入惯性传感器提供的姿态约束,进一步稳定垂直方向的估计结果。
三、基于深度学习的遮挡处理机制。系统能够智能识别前方车辆的位置和姿态,并将其从激光雷达数据中“擦除”,让定位算法专注于处理稳定的环境特征,避免被动态障碍物误导。
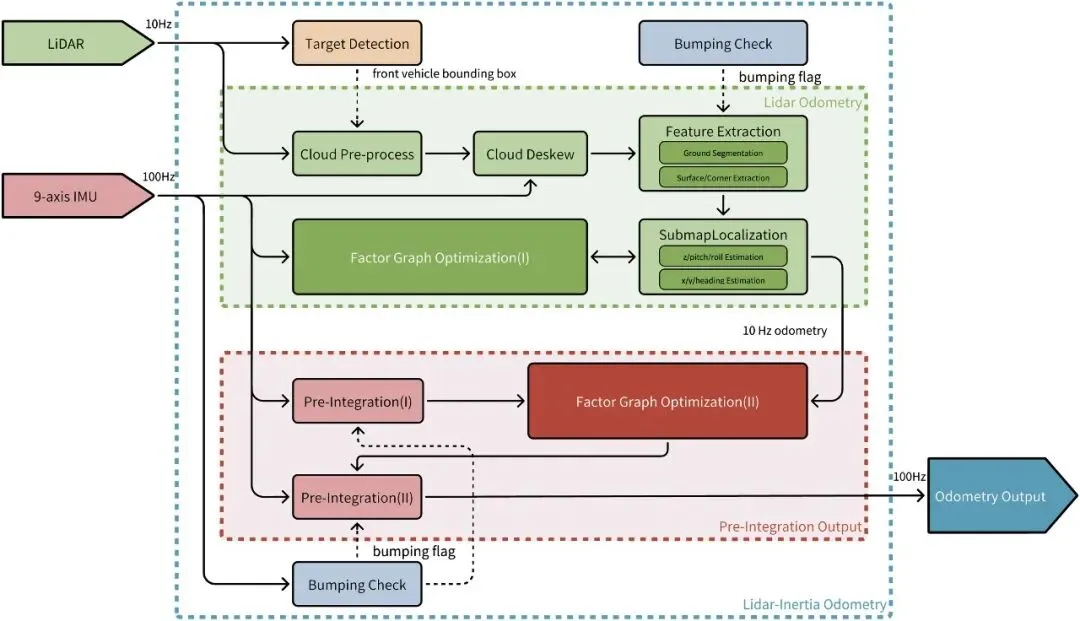
图2. 本研究所提出SLAM框架总体工作流程
02 | 研究方法 |
研究团队在专业汽车试验场地进行了全面的实验验证。如图3所示,实验使用按比例缩小的模块化公交车模型,每辆车都配备了高精度激光雷达和惯性导航设备。为确保结果的可靠性,还同步配置了厘米级精度的RTK定位系统作为基准真值进行算法性能评估。
实验设计了两个典型场景:(1) 单车自主行驶场景,模拟日常运营中的定位需求;(2) 双车对接场景,专门验证在车辆对接过程中的定位稳定性。为了训练前车识别算法,团队还构建了包含近1800帧激光雷达数据的专用数据集,确保算法能够准确识别各种角度和距离下的前车。
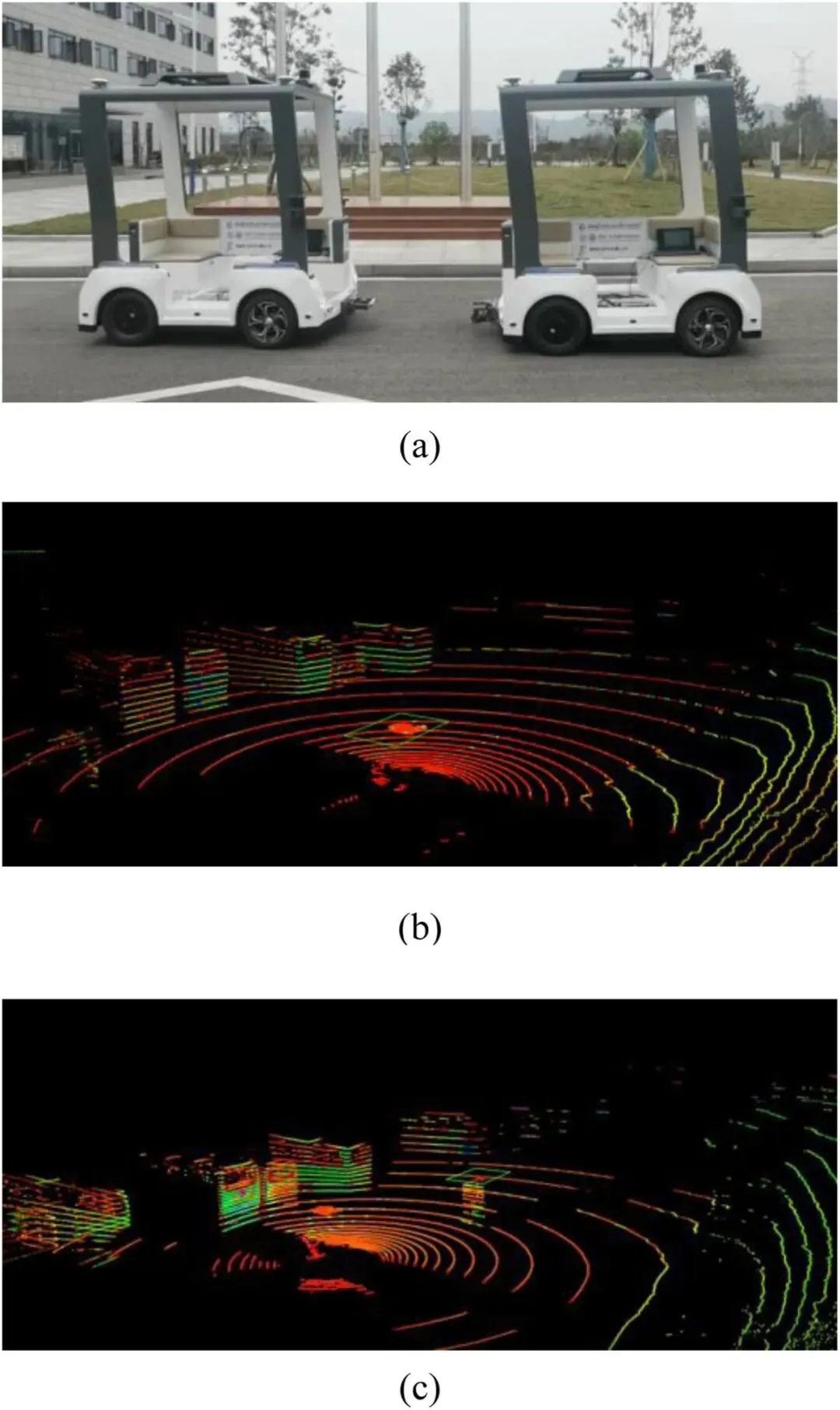
图3. 实车实验场景和点云数据示例。(a)模块化公交对接实验场景;(b) 单车自主行驶场景点云数据;(c) 双车对接场景点云数据
03 | 研究结果 |
1. 单车场景验证结果
为了全面评估各项技术改进的贡献,团队进行了详细的对比实验。结果如图4所示,完整的改进方案在绝对轨迹误差(ATE)和相对位姿误差(RPE)等关键指标上相比现有主流方法得到了显著提升。特别是在垂直方向的均方根误差(RMSE)方面,改进后的算法相比基线方法降低了约84%,几乎消除了垂直方向偏移问题,定位轨迹与真实路径高度吻合。通过逐一移除各项技术改进的消融实验证实,地面约束、姿态约束和因子图重置策略都对SLAM算法最终性能有重要贡献,其中地面约束对垂直定位精度提升作用最为显著。
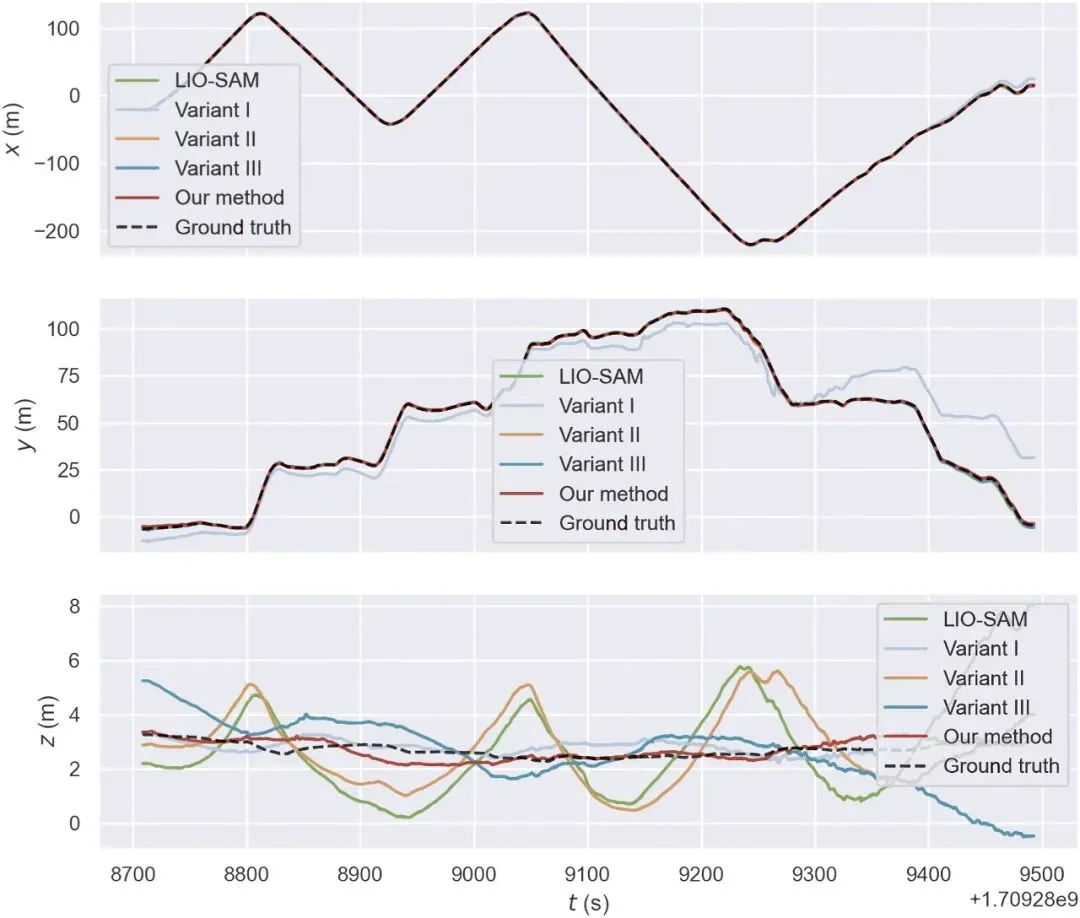
图4. 单车场景下各轴向位置估计变化曲线
2. 双车场景验证结果
在更具挑战性的双车对接场景中,前车识别算法在位置检测精度和航向角估计方面均表现出色,检测准确率的置信椭圆误差(CEP68)达到厘米级水平。图5展示了双车对接场景下的定位误差分布对比,当采用前车遮挡处理技术后,后车的绝对轨迹误差相比未处理情况降低了约59%,相对位姿误差减少了约47%,轨迹稳定性显著增强。实验表明,即使在前车严重遮挡激光雷达视野的情况下,改进后的SLAM算法仍能保持可靠的定位性能,为模块化公交安全自动对接提供了技术保障。
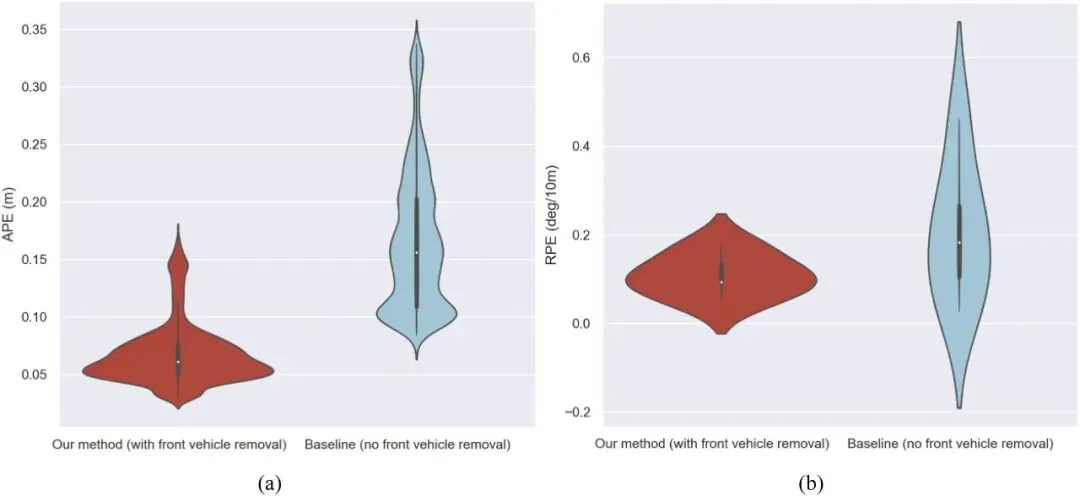
图5. 文章方法与基线方法的定位误差分布对比。(a) 绝对轨迹误差分布对比;(b) 相对位姿误差分布对比
04 | 研究意义 |
该研究解决了自动驾驶模块化公交系统中的关键技术瓶颈,为这一新兴交通模式的落地运营铺平了道路。通过提升对接精度和可靠性,该技术有望推动模块化公交在城市交通中的广泛应用,为缓解交通拥堵、提升公共交通服务质量贡献力量。
论文信息
原文链接:
https://www.sciencedirect.com/science/article/pii/S2773153725000933
引用格式:
Yixu He, Yushu Gao, Yang Liu, Xiaobo Qu, LiDAR-IMU SLAM Framework in Autonomous Modular Bus Docking Systems, Green Energy and Intelligent Transportation, 2025, 100343, ISSN 2773-1537, https://doi.org/10.1016/j.geits.2025.100343.
作者简介
何逸煦(第一作者),华南理工大学土木与交通学院博士研究生。主要研究方向为自动驾驶车辆轨迹控制与优化、自动驾驶车辆感知与定位技术、智能交通系统需求预测与系统优化。学位论文获评陕西省计算机学会优秀硕士学位论文,相关成果发表于Transportation Research Part D等国际知名期刊。

刘洋(通讯作者),清华大学车辆与运载学院副研究员、硕士生导师。入选国家级海外高层次青年人才计划,欧盟玛丽居里学者。致力于交通与AI的融合应用,以一作/通讯作者身份发表论文40余篇,谷歌学术引用2500余次,4篇入选ESI高被引论文。获得了公路学会优博论文、COTA最佳博士论文荣誉提名、IEEE智能交通系统杂志优秀论文等奖项。主持了多个项目,得到了国家自然科学基金委、欧盟委员会(European Commission)、瑞典国家创新局(VINNOVA)、智能绿色车辆与交通全国重点实验室、清华杭州临空示范区综合交通研究中心的资助。担任Transportation Research Part E编委、IEEE Transactions on Intelligent Vehicles副主编、Communications in Transportation Research编辑部主任、WTC智能驾驶出行服务技术委员会联合主席等职务。在国际顶级人工智能挑战赛中获得多个奖项,四次获得有着“数据挖掘领域世界杯”之称的国际数据挖掘与知识发现大会KDD CUP的冠、亚军。

“纪念北京理工大学建校85周年”专刊推荐阅读
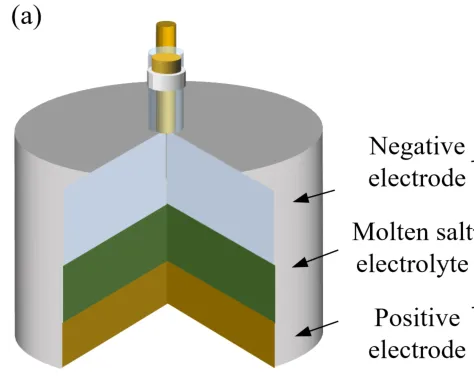
“纪念北京理工大学建校85周年”专刊 | A comprehensive numerical model incorporating potential, mass transfer, and species distribution in liquid metal batteries
作者代表:中国科学院院士、华中科技大学程时杰教授团队

作者代表:中国工程院院士、清华大学李克强教授团队
作者代表:中国科学院院士、清华大学欧阳明高教授团队
作者代表:中国科学院院士、西安交通大学陶文铨教授团队
作者代表:北京理工大学吴川/白莹教授团队
作者代表:中国科学院院士、中国石油大学(北京)徐春明教授团队
作者代表:中国工程院外籍院士、加拿大皇家科学院院士、加拿大工程院院士、加拿大工程研究院院士、福州大学张久俊教授团队
关于我们
ABOUT US
期刊简介
办刊宗旨
聚焦领域
先进储能系统与技术
交通电动化、智能化与网联化
电动运输与电网的相互关系
牵引用电力电子设备
绿色智能交通基础设施
载运智能化与可持续发展
新材料与轻量化技术在载运工具中的应用
绿色交通与可持续发展(包括碳中和)
人工智能、新材料和新技术的应用
办刊成果
投稿网址
期刊网址
咨询投稿
Email: geits@bitpjournal.org.cn
Tel: 010-68914772
我们会及时与您取得联系,谢谢!
公众号内容由Green Energy and Intelligent Transportation期刊编辑部撰写
编辑:徐宁
审核:李炳泉
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 1929劳斯莱斯幻影Ⅰ型豪华轿车1:24模型
- 35万级SUV杀疯了!问界M8刚上市22天破7万台,问界M8凭什么火成这样?
- 大众全新纯电SUV,5座布局,CEA架构打造,还有更多高阶智驾辅助
- 昨夜今晨全球大公司动态 | 特斯拉自动驾驶承诺长期未兑现用户不满;大众计划削减100万辆汽车产能
- 乐道L90上市:七座纯电SUV杀入18万区间
- 比亚迪造了台 “百万级豪华 SUV 平替”,3.9 秒破百 + 9 分钟满电,要变天?
- 8万左右也能买到优质纯电SUV?多选择性,极限四选一!
- 为什么说B级轿车才是真正的高速之王
- 宁德时代发布凝聚态电池,轿车续航1500公里
- 方程9(镁9)!方程豹首款纯电轿车来了
