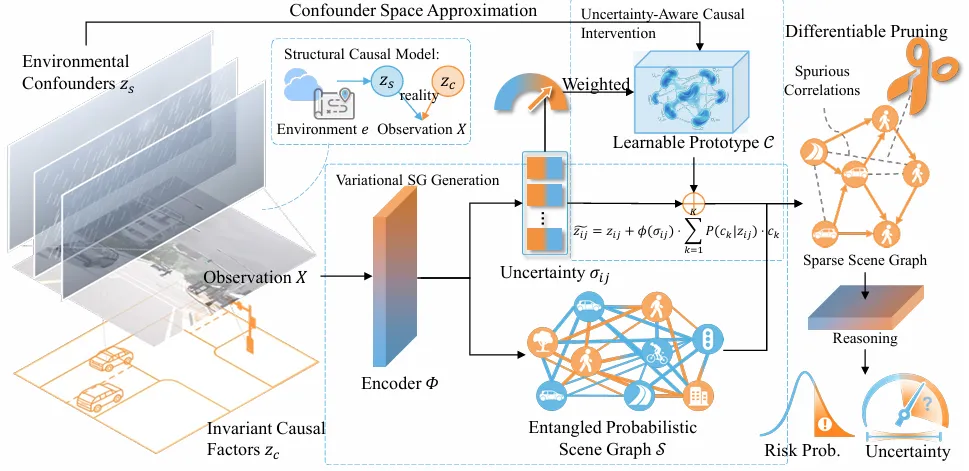
CURVE 的方法首先以结构因果模型刻画自动驾驶场景图的生成过程,将环境域 e 视为外生变量,并把潜在因素分为不变因果因素 zc 与虚假环境依赖因素 zs:前者对应目标几何、运动学和空间拓扑等跨域稳定的物理真实,后者对应光照、天气纹理和传感器噪声等随环境变化的干扰。理想目标是学习场景图编码器 Φ,使得到的交互表示尽可能保留 zc 信息并压缩 zs 信息;由于真实潜变量不可辨识,作者将其转化为跨域稳定表示学习问题。在实现上,CURVE 首先构建变分场景图生成模块,将显式场景图 S=(V,R) 中的实体节点和成对关系建模为高斯后验分布,其中关系嵌入的标准差 σij 表征由环境变化引起的数据依赖不确定性;低方差关系通常对应稳定物理机制,而高方差关系更可能代表环境敏感或虚假关系。随后,模型引入不确定性感知的软因果干预:使用可学习环境原型字典 C 近似连续混杂空间,对每个关系嵌入计算其与各环境原型的匹配概率,并聚合得到环境条件偏置,再由不确定性门控函数调节干预强度,对高不确定关系进行选择性残差校正,以削弱环境混杂影响而不破坏高置信、因果一致的交互。接着,模型通过可微结构学习把校正后的关系映射为置信分数,结合自适应阈值与每个节点 Top-K 策略进行剪枝,得到稀疏场景图,避免弱的环境共现关系在推理中传播;在图推理阶段,CURVE 使用反方差权重调节 RGCN 消息传递,降低高方差关系的影响,并进一步通过 LSTM 聚合时间序列,最终由 MLP 输出碰撞风险及其不确定性。训练目标由风险预测损失、不确定性校准损失、原型多样性损失和 KL 正则化共同组成,以同时约束预测准确性、置信度可校准性、原型不塌缩以及变分不确定性不过度膨胀。图2概括了整体框架:输入观测经编码器形成纠缠概率场景图,模型借助可学习环境原型和关系不确定性实施软干预,再通过可微剪枝去除虚假相关,输出用于稳健推理的稀疏因果一致图。
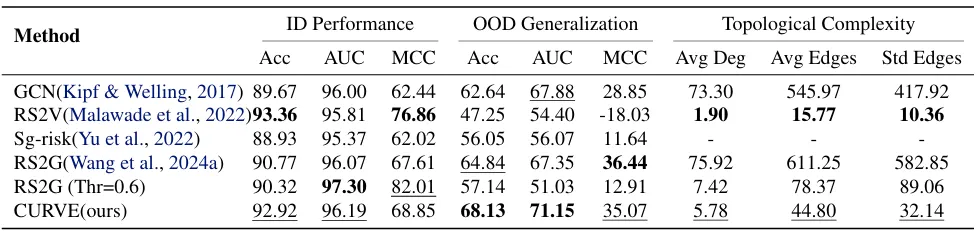
实验围绕三个问题展开:学习到的稀疏因果结构是否能提升未见域泛化能力,所提出模块是否对捕获真实稳定拓扑不可或缺,以及模型是否适用于安全关键任务中的可靠预测。作者将下游任务设定为自动驾驶中的序列级二分类碰撞风险评估,在 RS2G 框架内实现 CURVE,仅替换拓扑构建和关系学习部分,以保证主干、数据划分和训练协议公平一致。实验使用 CARLA-SR 作为源域训练与分布内测试集,DeepAccident 作为零样本仿真 OOD 测试集,DoTA 作为仿真到真实低标注适应数据集,并使用准确率、AUC、MCC 衡量风险预测,使用平均度、平均边数和边数标准差衡量拓扑稀疏性与稳定性。表1显示,在 CARLA-SR 到 DeepAccident 的零样本迁移中,CURVE 获得最高 OOD AUC(71.15)和最佳 OOD 准确率(68.13),同时将平均节点度降至 5.78、平均边数降至 44.80,说明它不是简单依赖稠密聚合,而是在保留域稳定交互骨架的同时显著剔除了环境驱动的冗余边。
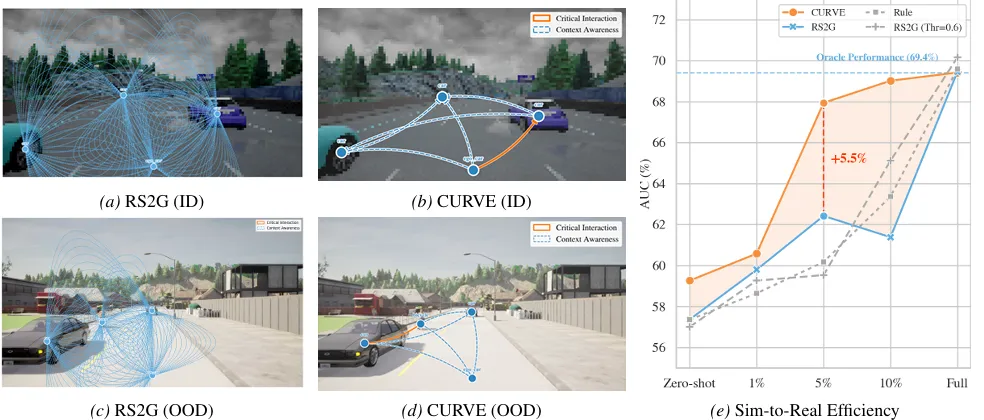
图3进一步可视化了这一点:相比 RS2G 在 ID 和 OOD 场景中均保留大量冗余连接,CURVE 的边更集中于关键交通参与者及其有效交互;在仿真到真实适应中,CURVE 在零样本条件下已优于基线,并且仅使用 5% 真实标注即可达到接近全监督 oracle 的 AUC,体现了稀疏结构的可迁移性和标注效率。
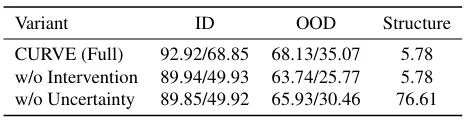
表2的消融实验表明,去除原型条件干预会使 OOD MCC 从 35.07 降至 25.77,说明混杂校正是保持语义不变性的关键;去除不确定性引导后平均度从 5.78 激增到 76.61,说明不确定性是过滤环境虚假边、实现结构稀疏化的核心。
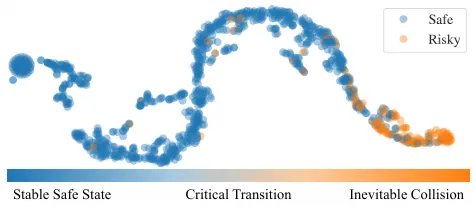
图4的 t-SNE 特征可视化显示,模型学习到的潜在空间呈现从稳定安全状态、临界转变到不可避免碰撞状态的连续风险演化流形,表明 CURVE 捕获的是事故风险累积的物理过程,而不是独立静态帧中的表面模式。
图5从鲁棒性与可靠性两个角度验证模型:在输入几何特征加入不同强度高斯噪声时,CURVE 的性能下降更缓慢;同时其正确与错误预测的归一化不确定性分布明显分离,且这种分离在零样本域偏移条件下仍保持,说明模型能够在安全关键场景中对错误预测给出更高不确定性,具备更好的风险感知和校准能力。











 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
