基于深度神经网络的自动驾驶道路施工检测系统
论文基本信息
| |
|---|
| 中文论文名 | |
| 英文论文名 | Deep Neural Network Based Roadwork Detection for Autonomous Driving |
| 论文链接 | https://arxiv.org/abs/2604.02282 |
| 作者团队 | Sebastian Wullrich, Nicolai Steinke, Daniel Goehring |
| 发表时间 | |
| 研究领域 | |
| DOI | 10.48550/arXiv.2604.02282 |
1. 摘要分析
1.1 核心研究问题
道路施工区域对自动驾驶车辆和人类驾驶员都构成了重大挑战,原因在于其高度动态性和异构性特征。传统的驾驶员辅助系统和自动驾驶系统往往在这类复杂环境中失效,因此亟需一种可靠、实时的道路施工检测与定位解决方案。
1.2 研究方案概述
本文提出了一个实时检测系统,其核心创新在于将YOLO神经网络与LiDAR数据进行融合。该系统具有三大核心能力:
1.3 数据策略
:AutoNOMOS Labs的"MadeInGermany"自动驾驶测试车1.4 性能指标
系统在真实道路施工区域的评估中展现了优于0.5米的定位精度,这一结果证明了该方案在实际应用中的可行性。
2. 研究现状分析
2.1 数据集现状
道路施工物体在主流数据集(如BDD100k和Mapillary)中严重缺失,仅标注了常见的交通锥等元素。ROADWork数据集虽然填补了这一空白,但稀有配置仍然稀缺。
现有数据集对比:
2.2 检测方法现状
主要技术路线:
Mask R-CNN方法:ROADWork数据集使用该方法进行像素级定位,但处理速度仅约5 fps,无法满足实时性要求
ResNet + U-Net方法:Sundharam等人采用像素级分割策略,可能实现实时处理,目标是为高级驾驶辅助系统(ADAS)集成
深度CNN分类器:Abodo等人通过主动学习方法高效标注道路施工场景
贝叶斯网络方法:Kunz和Schreier融合车载传感器的不确定线索,无需地图先验即可检测高速公路施工区域
相机 + SVM方法:Seo等人使用AdaBoost橙色像素检测器和SVM识别道路施工标志
EfficientDet + LiDAR方法:Shi和Rajkumar提出的三阶段流程,结合EfficientDet-D0图像检测与3D LiDAR关键点
2.3 现有方法的局限性
大多数方法仅依赖相机,限制了精确边界定位能力。Shi和Rajkumar的方法虽然结合了LiDAR,但存在以下问题:
:最远仅27米,在50 km/h以上速度时安全性存疑3. 研究创新点
3.1 传感器融合架构创新
本文采用更快的YOLO网络(YOLO11m)配合低分辨率Ibeo LUX LiDAR传感器,实现了:
3.2 数据集本地化创新
数据集适应方法:
| |
|---|
| 从ROADWork数据集中筛选德国相关类别,重新标注 |
| |
| 通过rosbag文件分析,将背景图像比例从10%提升至60%以上 |
3.3 检测阈值自适应创新
系统根据车辆速度动态调整检测阈值:
这种自适应机制确保了在高速行驶时也能可靠检测施工物体。
3.4 目标匹配策略创新
当多个候选物体IoU超过50%时,选择LiDAR轮廓线最接近CNN边界框底部的候选物,而非简单选择IoU最高的物体,提高了匹配准确性。
4. 数据集详细分析
4.1 ROADWork数据集(美国)
原始数据集特征:
适配后数据集:
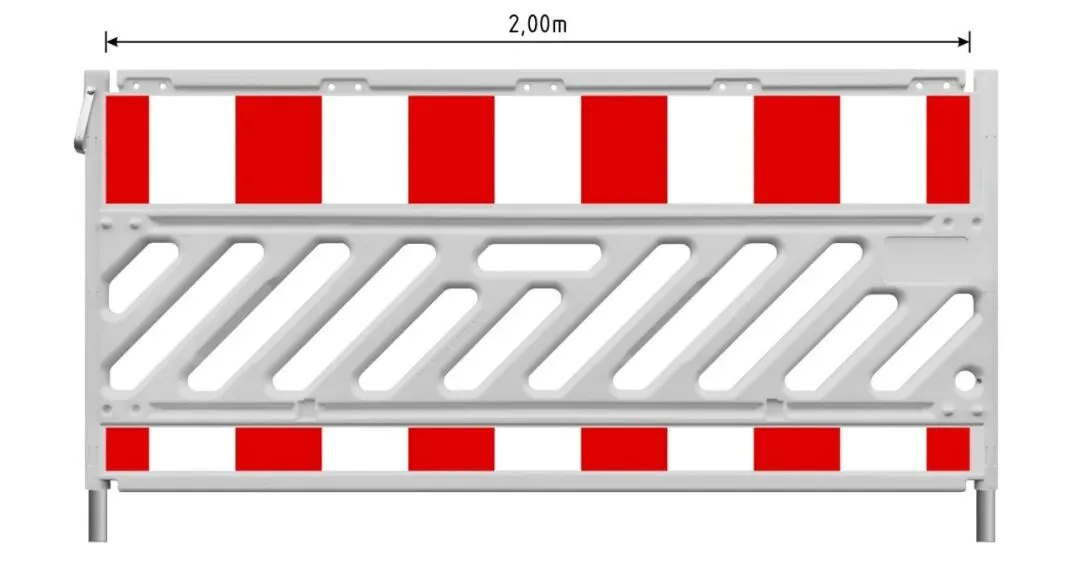
德国道路施工物体类别:
| |
|---|
| |
| |
| Vertical Panel pass left(左通行标志牌) | |
| Vertical Panel pass right(右通行标志牌) | |
4.2 AutoNOMOS Labs数据集(德国)
数据采集:
从"MadeInGermany"原型车测试驾驶中生成类别分布特点:
交通锥实例仅89个(因德国道路施工很少使用交通锥)4.3 数据集对比分析
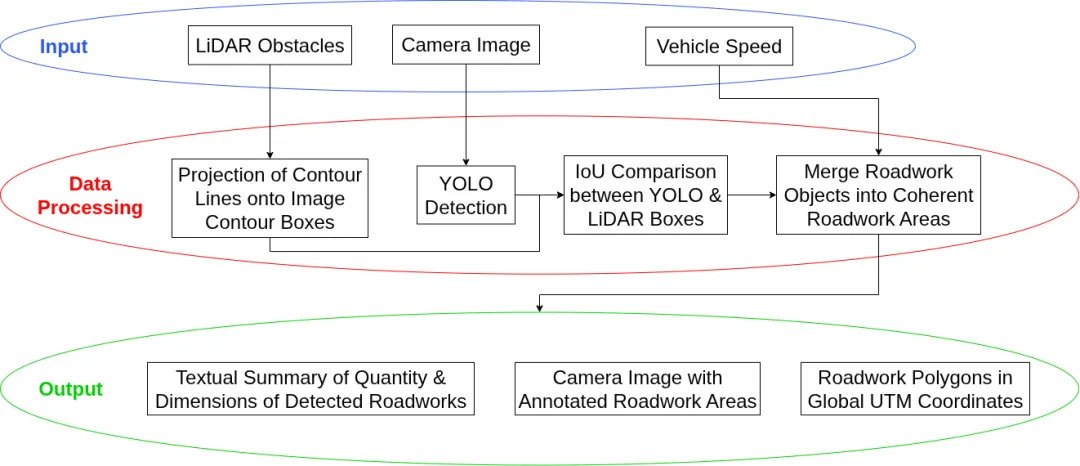
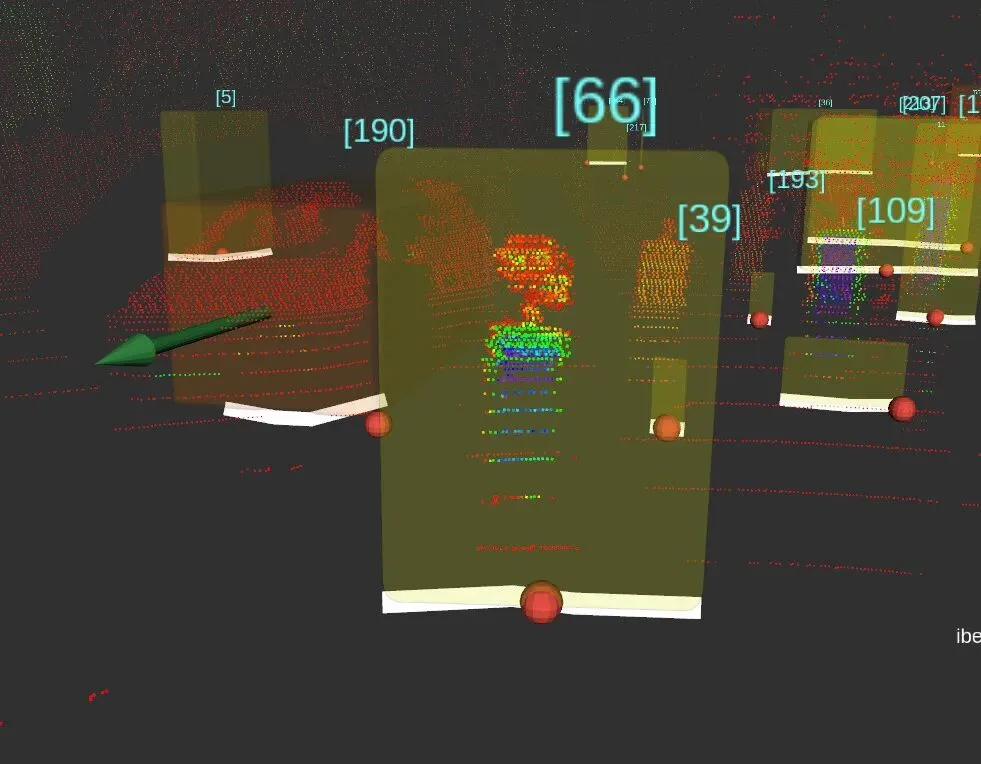
5. 算法系统架构
5.1 系统数据流架构
系统三大输出:
:在相机图像上标注道路施工区域(通过组合多个CNN预测的边界框获得)系统三大输入:
5.2 技术基础设施
硬件配置:
| |
|---|
| 自定义RCCB相机,Onsemi AR0220传感器,1820×940像素,约20 fps |
| 6个Ibeo LUX传感器,每传感器8线,探测距离200 m,精度~10 cm |
| Velodyne Alpha Prime 128线,360°点云,探测距离245 m |
| Intel Core i9-9900K + NVIDIA RTX 2080,CUDA 12.8,Ubuntu 24.04 |
5.3 里程计处理模块
动态阈值调整公式:
阈值限制规则:
5.4 LiDAR处理模块
关键处理步骤:
轮廓构建策略:
由于LUX LiDAR扫描模式低平,无法直接测量障碍物高度长物体(如护栏)超出相机视野时,在图像边界插值新点5.5 相机处理模块
CNN-LiDAR融合检测:
物体分组阈值:
6. 实验结果与图表分析
6.1 YOLO模型评估
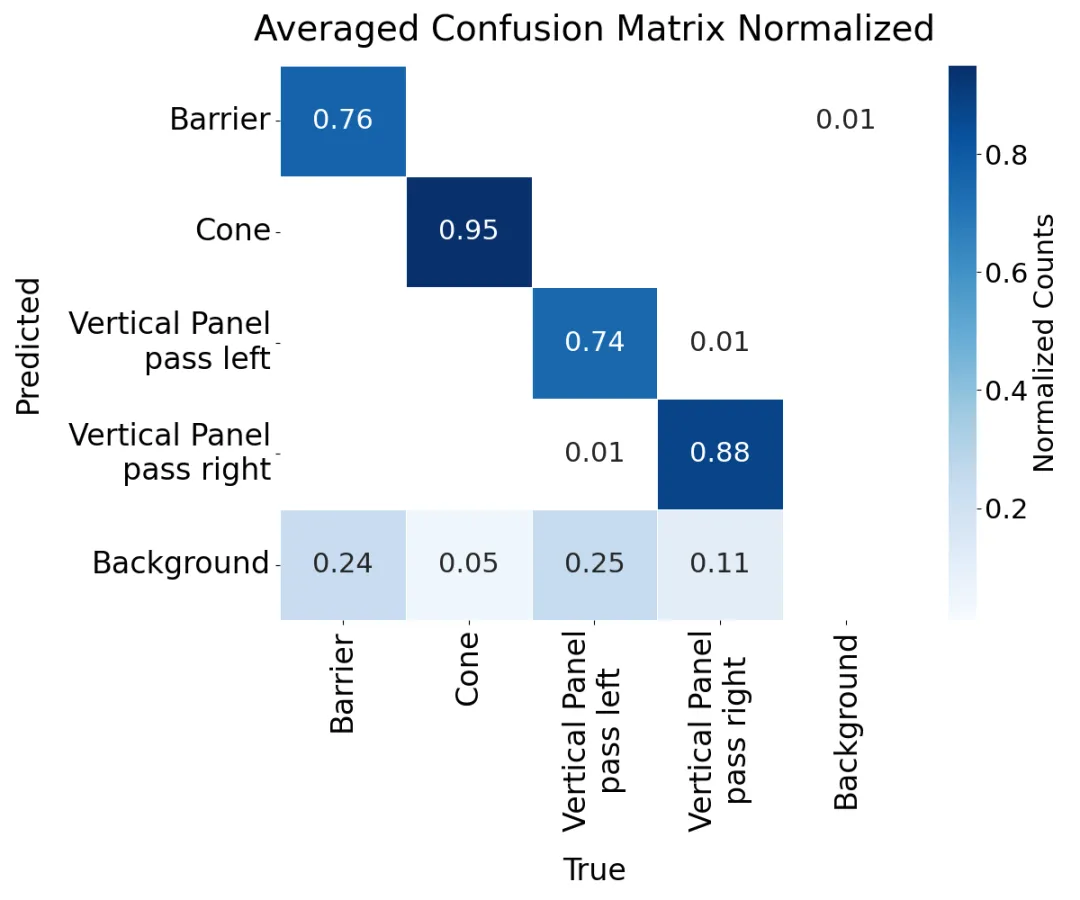
6.1.1 背景图像优化效果
通过将背景图像比例从10%提升至60%以上:
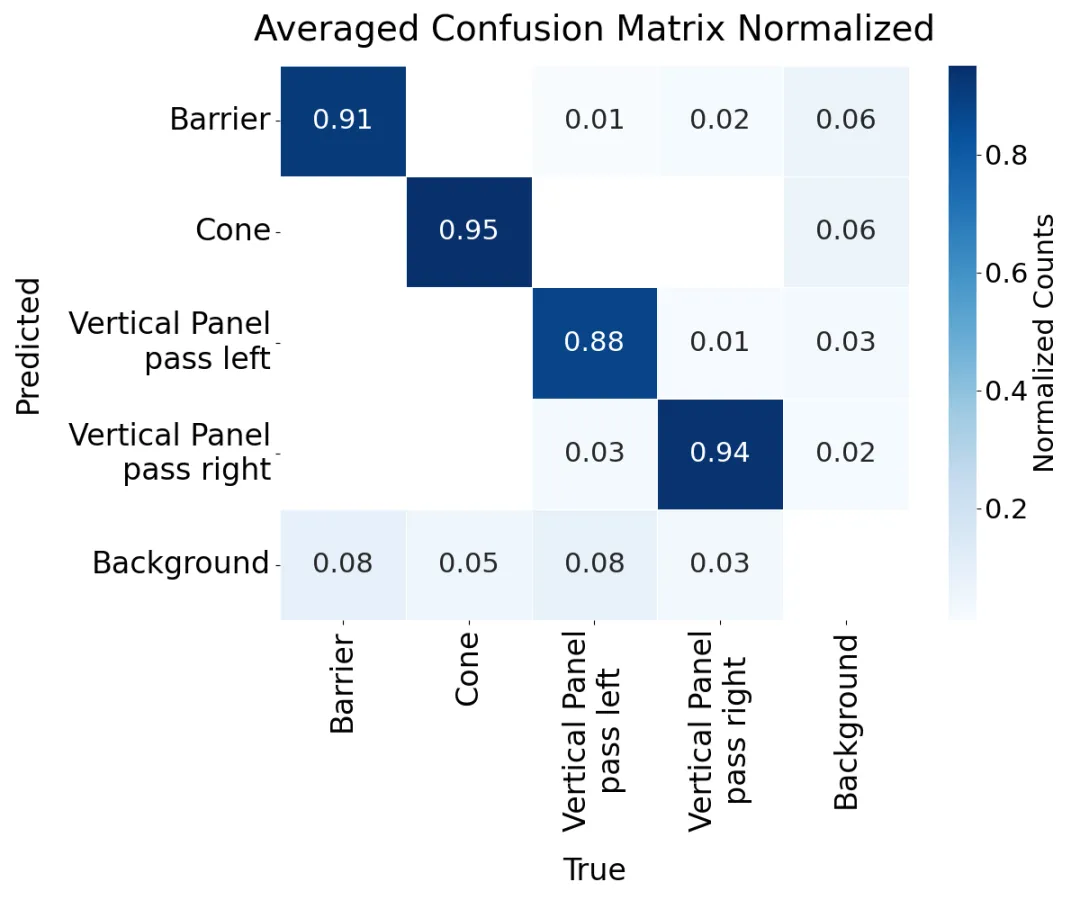
6.1.2 6折交叉验证结果
混淆矩阵分析:
性能指标(采用高置信度阈值后):
关键发现:
6.1.3 误报与漏报分析
误报示例分析:
大多数误报发生在真实的施工场景内。例如上图显示在大护栏内部预测了一个小护栏。真正的误报极少(仅2个),且都在图像边缘。
漏报示例分析:
大多数漏报涉及远处物体,一旦车辆接近,这些物体就会被检测到。
6.2 系统测量精度评估
6.2.1 真值建立方法
由于Geoportal Berlin数据不够精确,研究团队使用Velodyne Alpha Prime 3D点云手动建立真值:
沿每个识别的边缘选择10个点(相同水平位置,不同高度)6.2.2 精度评估结果
基于近100次测试测量:
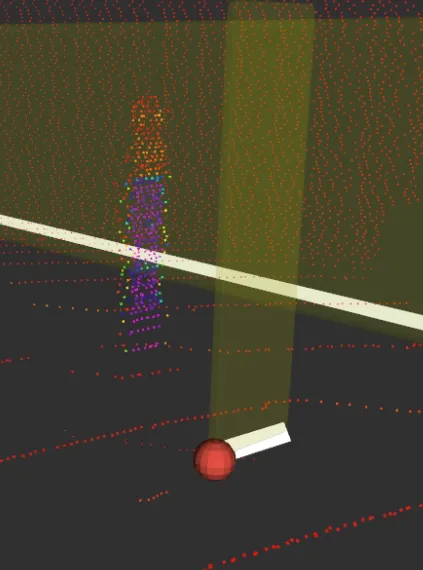
6.2.3 LUX与Velodyne对比分析
发现LUX传感器轮廓经常比点云宽或稍微靠前,可能是因为LUX传感器测量更接近地面,捕获了施工物体的支撑底座。
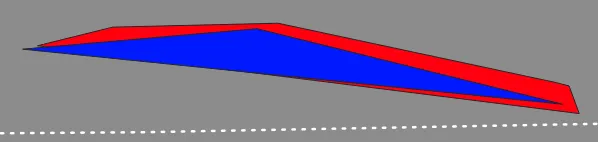
6.2.4 系统测量与真值对比
红色(系统测量)有时比蓝色(真值)延伸得更进入街道,可能是因为支撑底座的存在。这表明系统实际精度可能更好。
6.3 Geoportal Berlin应用评估
发现问题:
11个评估的施工区域中,9个在Geoportal Berlin有记录实际案例:
某施工区域在2024年11月就被检测到,但Geoportal直到2025年4月下旬才注册6.4 系统性能评估
处理速度优化措施:
性能指标:
瓶颈分析:
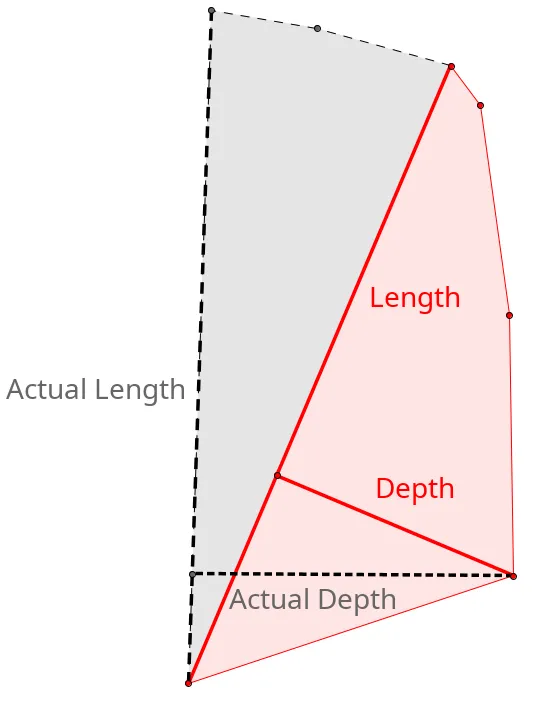
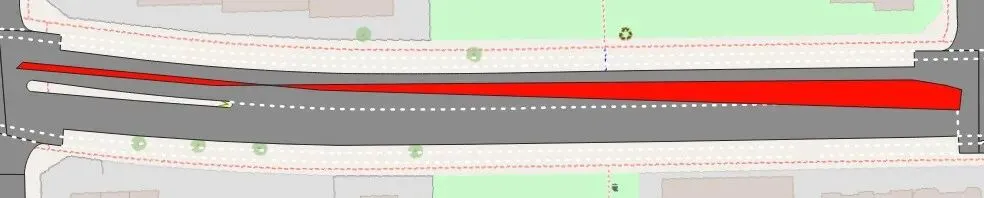
输出速率受LiDAR更新频率约束(约13 fps)6.5 施工区域测量方法
测量定义:
红色区域展示了车辆通过时利用检测到的施工物体进行的当前尺寸测量(从下往上移动,靠右通行)。灰色区域表示未检测到的部分,代表实际施工区域的全部范围。
6.6 最终输出形状对比
两种输出形式:
平滑版本更好地逼近真实世界的施工区域形状,但牺牲了一些细节。
6.7 系统局限性分析
三大局限性:
:LUX LiDAR因物体尺寸小而难以检测,只能在锥非常靠近时检测:无法捕获施工区域的全部范围,因终点的物体可能被其他物体遮挡7. 结论与展望
7.1 主要贡献
高精确定位:系统能够以至少0.5米(可能接近0.1米)的精度检测、定位和测量道路施工区域
数据集贡献:成功适配了美国道路施工数据集并创建了新的德国数据集
实时性能:通过YOLO11m与LiDAR融合,在适度硬件上实现了实时处理
数据质量验证:证明了Geoportal Berlin数据的不足,展示了自动化检测系统的价值
7.2 应用前景
:减少拥堵、减缓交通,并有助于防止追尾碰撞甚至挽救生命7.3 未来改进方向
8. 论文总结
本文提出的道路施工检测系统代表了自动驾驶感知领域的重要进展。通过巧妙地融合深度学习目标检测(YOLO11m)与LiDAR传感器数据,系统在保持实时性能的同时实现了精确的施工区域定位。
核心优势总结:
该研究不仅展示了技术可行性,还揭示了官方地理数据质量的问题,为后续研究和实际部署提供了宝贵的经验和方向。









 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
