英文播客
本期播客我们将聚焦人机共驾时代的用户信任危机。在乘坐自动驾驶汽车时,如果车辆的驾驶风格与你平时的习惯不符,难免会让人感到紧张甚至晕车。我们将深度解析作者如何巧妙结合脑电信号与图卷积网络,精准量化人类对自动驾驶风格的动态接受度,为打造“懂你”的闭环自动驾驶系统提供来自神经科学视角的硬核支撑。
论文档案
- • 题目: Human–Machine Fitness While Driving: Evaluating Human Acceptance of Autonomous Driving Styles Through EEG Signal Analysis
- • 摘要: Autonomous driving (AD) systems often exhibit driving styles that differ considerably from those of human drivers. When users engage with AD systems, they are essentially passengers in a vehicle controlled by an unseen operator. This lack of fitness can lead to unexpected driving behaviors, which may significantly undermine user trust. Evaluating human–machine fitness is essential for ensuring safety, efficiency, and user satisfaction in AD systems. However, evaluating human acceptance of AD styles is challenging due to their subjective nature and context-dependent variability. In this study, we utilize electroencephalography (EEG) signals collected from the same individuals during both autonomous and manual driving (MD) to analyze AD acceptance, capturing subtle human responses during human–machine interactions. By examining the differences between MD and AD styles in car-following segments, we quantify AD acceptance. We build a prediction model using EEG-based brain functional networks with various similarity metrics and thresholding methods. The results show that our model outperforms baseline methods, achieving an R2 of 0.824, with the combination of phase-locking value and density-based thresholding being the most effective. Cognitive analysis indicates that brain networks exhibit greater efficiency during MD than AD, and this difference diminishes with increased acceptance of AD. Furthermore, high-order connectivity matrices indicate that different acceptance levels are linked to distinct coupling patterns between brain networks across various task states. This research provides insights for continuously assessing AD acceptance, aiding in the development of reliable systems tailored to diverse users.
- • 关键词: Autonomous driving (AD) acceptance, brain functional network, driving behavior, electroencephalography (EEG), human–machine fitness.
- • 引用: G. Qi, Z. Dong, W. Guan, A. Huang and Y. An, "Human–Machine Fitness While Driving: Evaluating Human Acceptance of Autonomous Driving Styles Through EEG Signal Analysis," in IEEE Transactions on Human-Machine Systems, Early Access, doi: 10.1109/THMS.2026.3676889.
背景挑战
随着自动驾驶(AD)技术的飞速发展,人类在车内的角色正逐渐从“驾驶员”向“人类监督员”转变。然而,由于车辆的决策算法缺乏足够的“人情味”,自动驾驶系统的驾驶风格往往与人类的日常驾驶习惯大相径庭。这种“人机不适配”成为了阻碍自动驾驶普及的巨大心理屏障。论文作者敏锐地指出了当前自动驾驶接受度研究存在的三大痛点:
- 1. 主观性与滞后性:现有的研究极度依赖主观问卷或事后访谈(如技术接受度模型TAM或UTAUT)。这种宏观的评估方式难以捕捉人类在乘车过程中的瞬间情绪变化和动态认知体验。
- 2. 离散分类的局限性:此前的生理信号(如 EEG、ECG)研究大多将接受度视为一个“分类任务”(如低、中、高)。这种粗粒度的离散分类丢失了接受度随时间推移的精细动态变化规律,难以直接用于车辆控制策略的平滑调节。
- 3. 特征提取的空间局限:大脑是一个天然的复杂网络,但传统的机器学习或卷积神经网络(CNN)往往将EEG信号视为欧几里得空间的数据(如简单的二维矩阵),忽略了不同脑区之间高度复杂的非线性拓扑连接关系。
科学方案:针对上述挑战,作者提出了一种基于图卷积网络(GCN)和连续脑电信号评估的创新框架。该框架的核心思想是“动态差异映射与拓扑特征学习”:摒弃传统离散标签,将人工驾驶(MD)与自动驾驶(AD)在特定驾驶片段下的风格差异量化为连续的接受度指标,并利用相位锁定值(PLV)构建基于 EEG 的脑功能网络,输入双分支 GCN 中进行预测,从而实现对人机适配度的高精度、动态捕捉。
系统架构
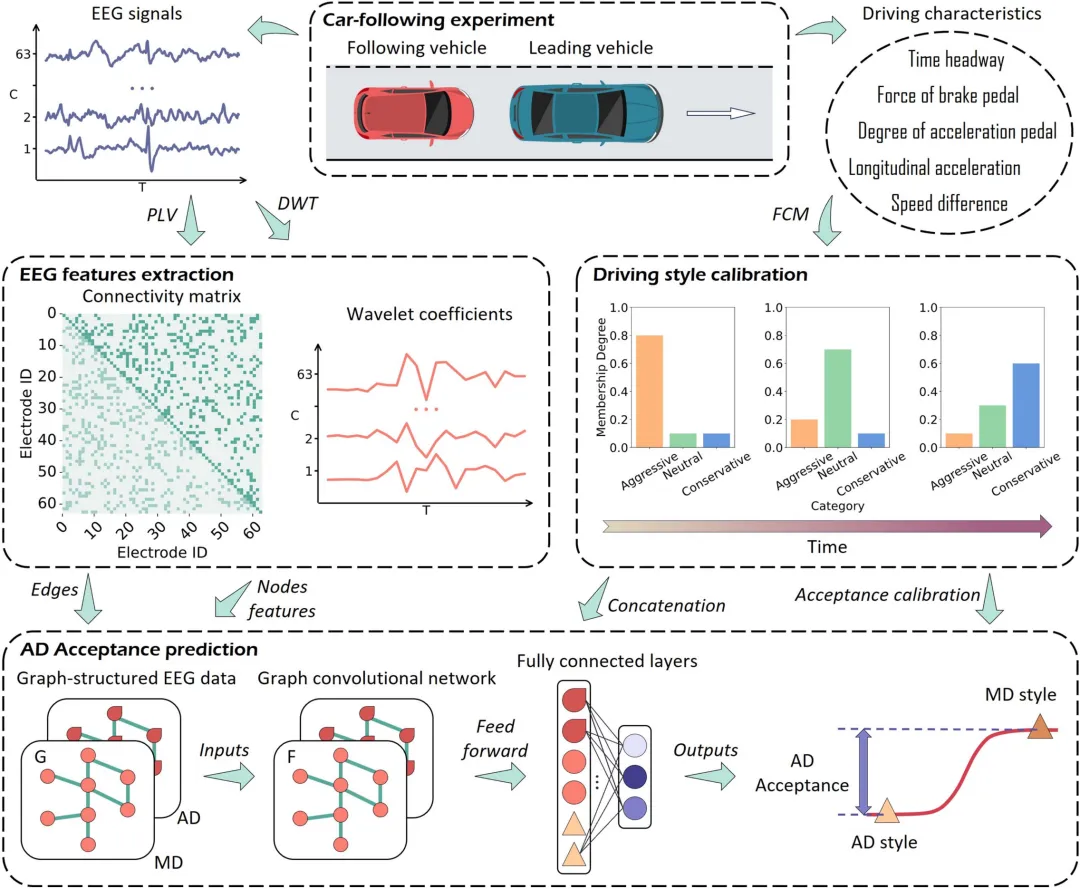
作者构建了一个融合了真实驾驶模拟器、VR 头显和 64 通道 EEG 采集设备的闭环多模态实验平台,重点研究了经典的跟车场景。
- 1. 驾驶风格连续标定:作者对驾驶片段进行了模糊C均值(FCM)聚类。与以往的硬分类不同,这里使用了属于“激进”类别的连续隶属度作为标签。自动驾驶接受度()被巧妙地定义为AD风格标签()与MD风格标签()的算术差:
当 趋近于0时,代表风格高度一致,接受度极高;当其趋向极值时,则代表接受度低。
- 2. 图结构脑电数据构建:大脑并非孤立运作。作者利用离散小波变换(DWT)提取低频(0-30Hz)脑电特征,并使用相位锁定值(PLV)来量化不同电极间的同步性,以此作为脑功能网络的边权重:
随后,采用密度阈值法对矩阵进行二值化,构建出真实的脑功能拓扑图。
架构优势:这种连续接受度指标和图结构构建设计极其巧妙。它不仅在数学上保证了模型输出的连续性,极其适合用于自动驾驶控制系统基于梯度的实时平滑优化;同时利用PLV网络真实还原了大脑在处理“不适感”时的复杂神经耦合过程,为纯黑盒的深度学习赋予了强烈的认知神经科学可解释性。
核心算法
为了处理高维且具有非欧几里得属性的脑电图结构数据,作者设计了一种双分支图卷积网络。
1. 脑网络拓扑构建:基于锁相值(PLV)与密度阈值
与传统的相干性或皮尔逊相关系数(PCC)不同,作者采用了对非线性动力学系统和振幅波动具有更强鲁棒性的 PLV 来构建大脑功能连接矩阵:
考虑到大脑网络中并非所有连接都是有效的,作者进一步引入了基于密度的阈值化,仅保留前 的有效连接,从而剔除假性连接并突出核心子网。
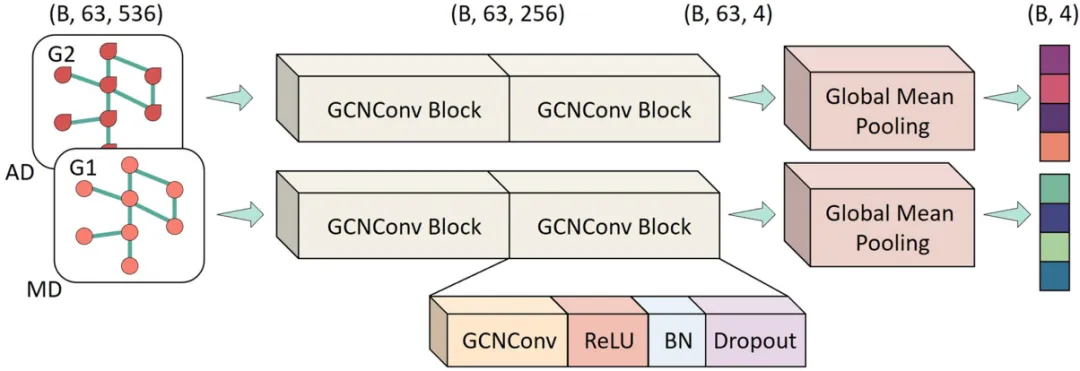
2. 双分支图卷积特征提取
模型采用两个结构相同但独立的 GCN 分别处理 MD 和 AD 期间的高维 EEG 图数据。在图卷积层中,节点特征通过聚合其邻居节点的信息进行更新:
随后,利用全局平均池化(Global mean pooling)对各个节点的特征进行进一步的维度压缩:
最终,两个 EEG 特征向量与 AD 时期的驾驶情境特征拼接,送入全连接层输出连续的接受度预测值。
算法优势:提出的双分支 GCN 模型在计算复杂度上表现出极其惊艳的效率。与传统的 FNN 或 CNN 基线模型相比,它直接在拓扑图上操作,不但避免了将脑电信号强行网格化带来的空间信息丢失,其参数量(不到 0.3M)和计算操作数(MACs)更是远低于对比方法。这种轻量化设计让其实时部署于车载边缘计算节点成为了可能。
仿真评估
作者招募了 35 名具有实际驾驶经验的受试者,在实验中采集了 MD 与 AD 交互的丰富数据,并进行了深度的对比分析与图论特征挖掘。
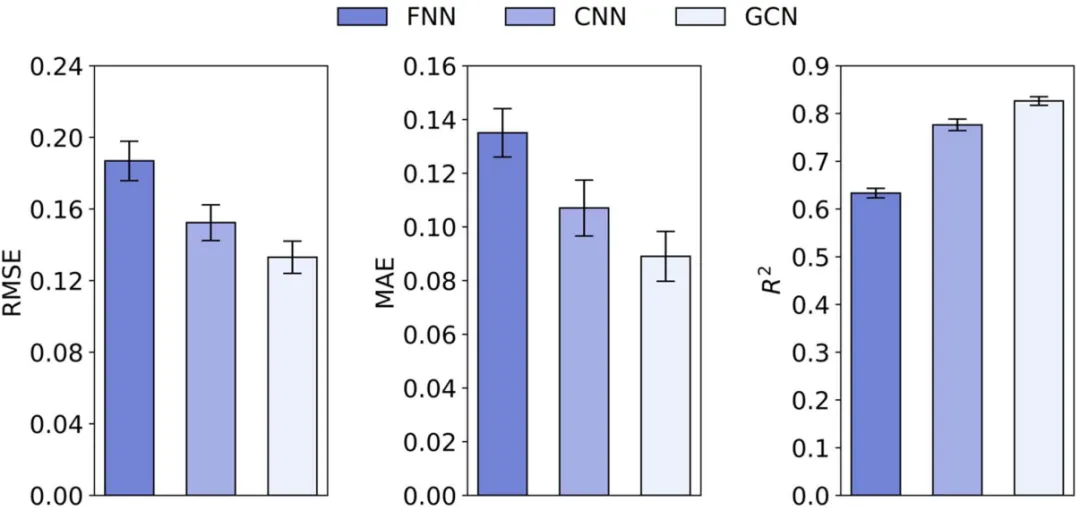
1. 预测性能上的碾压优势
在预测 AD 连续接受度的任务中,GCN 模型取得了 、RMSE为0.133的优异成绩,显著击败了 FNN 和 CNN 基准网络。这直接证明了图神经网络在提取跨通道EEG连接性特征时,远胜于传统的欧几里得距离度量。此外,实验指出,基于PLV和Top 10%密度阈值构建的网络质量最高。
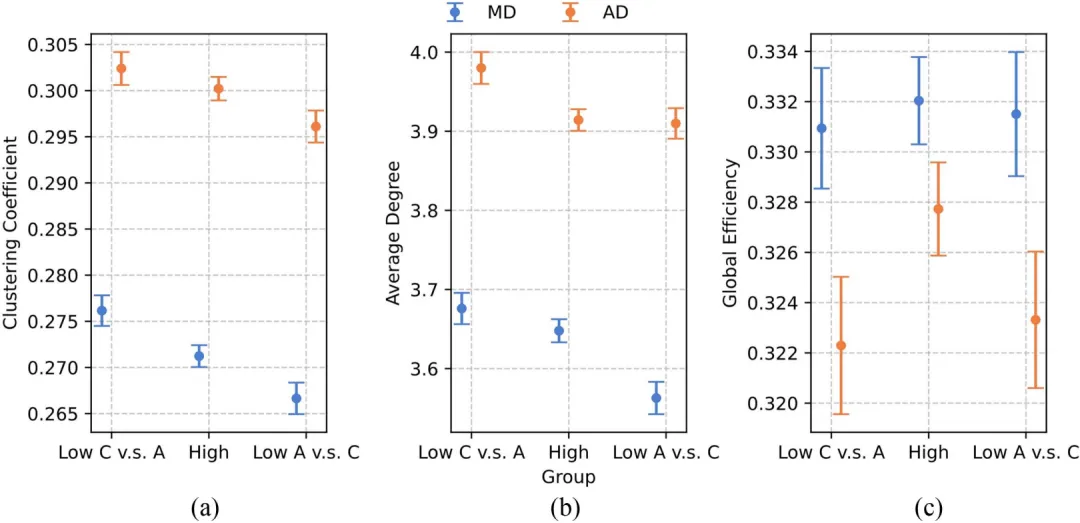
2. 脑网络图论特性与接受度的深度映射
作者通过计算脑网络的聚类系数、平均度和全局效率,揭示了一个深层次的生理现象:在 MD 状态下,大脑网络往往具有较低的局部密度但更高的全局效率,这意味着人类自己开车时,大脑能以更稀疏的连接高效运转。而当用户作为乘客体验不一致的AD风格时,脑网络的全局效率会下降。
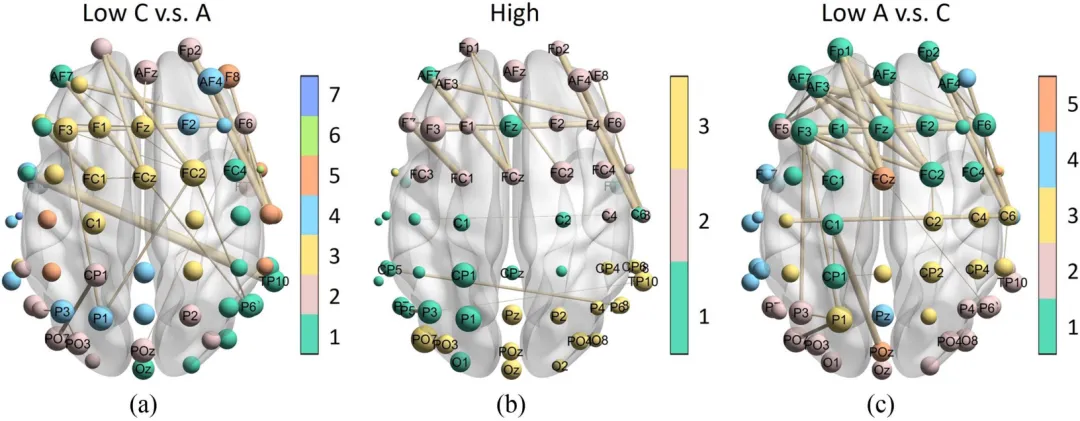
3. 前额叶:信任与接受度的核心枢纽
通过社区检测,作者发现高接受度对应着较少的脑网络社区数量,即全局网络协同性更好。特别是前额叶的内部连接密度与接受度呈现出高度的相关性。当 AD 风格比人类更激进时,前额叶连接出现冗余;当 AD 过于保守时,连接显得不足。这一发现与认知科学中前额叶主管“多感觉整合”与“信任判定”的结论完美契合。
观点引述
以下摘录自论文中的一些有价值的论述,建议大家在撰写人机共驾、自动驾驶信任度或脑机接口相关论文时参考和引用。
1. 论证连续评估取代离散分类的必要性
Although such categorical predictions can capture general trends, they inevitably lose fine-grained temporal dynamics and subtle transitions between states. In our view, this loss of resolution limits the ability of AD systems to respond adaptively in real time. By contrast, our approach outputs a continuous acceptance value... enabling smoother and more informative feedback during model training.
解析:当你需要证明你的研究为何采用连续变量而非简单的分类(如信任度分级)时,这段话是绝佳的论据。它明确指出了连续输出对实时自适应控制系统(梯度优化)的不可替代性。
2. 揭示“脑网络效率”与“系统信任度”的内在联系
Differences in driving style consistency between the human and the AV appear to induce insufficient or redundant connectivity in the cross-state brain network, leading to changes in network efficiency and ultimately contributing to variations in AD acceptance.
解析:在分析生理信号机制的论文中,这句原话精准概括了“风格不一致 -> 神经连通性异常 -> 脑网络效率下降 -> 接受度变低”的作用链条,可以直接作为你解释实验结果的理论背书。
3. 指出前额叶在人机交互中的关键作用
An indirect inference can be drawn that a mismatch in driving styles between human drivers and AD systems may induce changes in frontal lobe connectivity, leading to lower acceptance... This provides strong evidence that the frontal region makes a larger contribution to acceptance prediction.
解析:如果你的研究利用了 EEG 或 fNIRS 特征,并且发现了前额叶的显著性变化,引用这句话可以有效巩固你的结论,证明前额叶在评估人类对机器信任/接受度中的核心枢纽地位。
4. 重新定义“驾驶风格”的动态属性
Our study builds on this conclusion but goes further by treating driving style as a dynamic, time-varying construct rather than a fixed attribute. We segment trips and apply staged clustering to capture intra-driver variability...
解析:很多传统研究假定一个人的驾驶风格是固定不变的。当你提出在复杂环境中(如不同路况、不同交通流)人类或 AI 的驾驶风格应是动态切换的假设时,这句引语能够强力支撑你的“动态建模”逻辑。
总结展望
本文提出的基于 EEG 与 GCN 的接受度预测框架,为人机协作系统中的信任度评估打开了一扇崭新的窗口。它打破了传统研究“重表象(问卷调查)、轻机制(神经连接)”的桎梏,展示了如何通过严密的脑功能网络图论分析,精准量化人类对自动驾驶策略的底层认同感。
面向未来的智能网联交通,这种“生理反馈监测 + 连续偏好预测 + 策略自适应调节”的闭环人机交互范式,必将在消除人类接管焦虑、提升自动驾驶规模化落地进程中,发挥不可替代的作用!
#自动驾驶 #脑机接口 #图卷积网络 #人机交互 #脑电信号 #智能交通
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
