核心摘要:承载同济科研基因,同润智能让低成本4D雷达+摄像头方案,突破毫米波雷达瓶颈,逼近激光雷达的检测精度,已获多家头部车企法规量产。
炎夏的一场暴雨,深冬的一团浓雾,暮色中的一道强光——这些再日常不过的场景,却是当前自动驾驶系统最害怕的“鬼门关”。
摄像头在高动态范围下容易过曝或欠曝,图像特征严重退化;激光雷达虽然点云密集,但在雨滴、雪花、水雾中会产生大量噪声和虚警,探测距离和置信度双双跳水。当两大主力传感器同时“掉链子”,智能驾驶的安全冗余便形同虚设。
行业老生常谈的一个矛盾,至今没有完美答案:既要保证安全冗余,又要控制车辆硬件成本,如何在10万-15万级的主力车型上做到“安全过关”?
出路在于4D毫米波成像雷达。
4D雷达比传统3D雷达多出一个“高度”维度,可以清晰分辨限高杆、天桥、路牌等高空物体,角分辨率提升到1-2度,点云密度可达传统雷达的8倍以上。佐思汽研数据显示,2024年中国乘用车市场4D毫米波雷达安装量达273.7万颗,2025年飙升至1106万颗,同比增幅超400%,预计2030年将突破5000万颗,渗透率从2025年的26.0%跃升至54.5%。一颗基础版4D成像雷达的批量采购价已下探至激光雷达的十分之一左右。
然而,4D雷达并非万能。它的点云分辨率仍然无法与中高端激光雷达(如32线、64线)相提并论,稀疏的点云对于精细分类和小目标检测来说“心有余而力不足”。
能不能用低成本的4D雷达,做出接近中高端激光雷达的检测精度?
同润智能研发团队用一套名为DSFusion的双采样特征融合算法,给出了一个让人眼前一亮的答案。
面对这一行业难题,同润智能的解法清晰而坚定:不堆硬件成本,堆AI算法。
整套解决方案的核心技术DSFusion,借鉴了当前AI大模型中的跨模态对齐、注意力筛选等前沿思想,让4D雷达和摄像头真正“读懂”对方的语言。
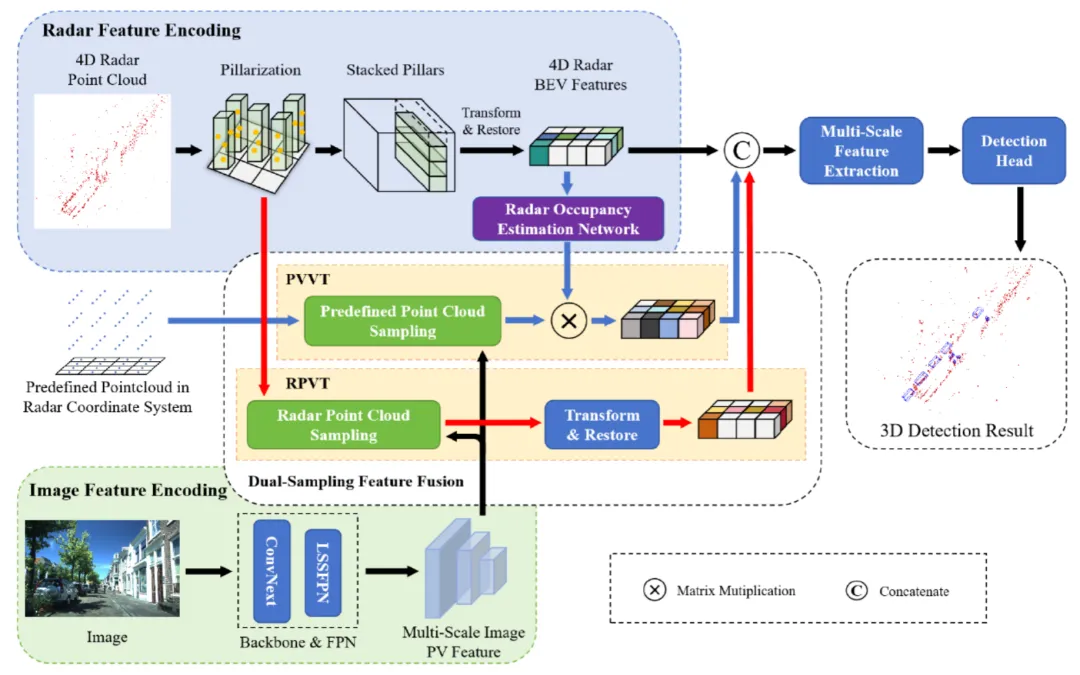
整个DSFusion架构可以概括为三步“智能协作流水线”:
第一步:预对齐——让两种传感器“对上一个眼神”。
摄像头拍下的是图像像素,4D雷达输出的是三维空间点云,两者不在同一个坐标系里。同润智能设计了预定义体素视图变换模块(PVVT):在3D空间中预先均匀采样参考点,再利用精确标定的内参和外参,将高分辨率图像中的丰富特征映射到这些参考点上。图像里每个像素的颜色、纹理、边缘信息,都被“投射”到了雷达所在的物理空间位置——这是跨模态融合的第一步。
第二步:智能筛选——用雷达“三维门槛”过滤无效信息。
摄像头图像中有大量区域是天空、地面、植被,对目标检测并无贡献,反而造成计算浪费和特征干扰。同润智能引入了一个精巧的雷达占据估计网络(ROENet),以雷达的BEV(鸟瞰图)特征为输入,经过上下采样和通道变换,输出精确到每个体素的3D占据概率——判断这个位置是真的有物体,还是空地或背景。有了这个“概率门槛”,模型只保留被判定为“真实占据”区域的像素特征,其余的直接过滤掉,既降低了计算量,又剔除了干扰。
第三步:细粒度补全——用雷达点坐标在图像上“描边”。
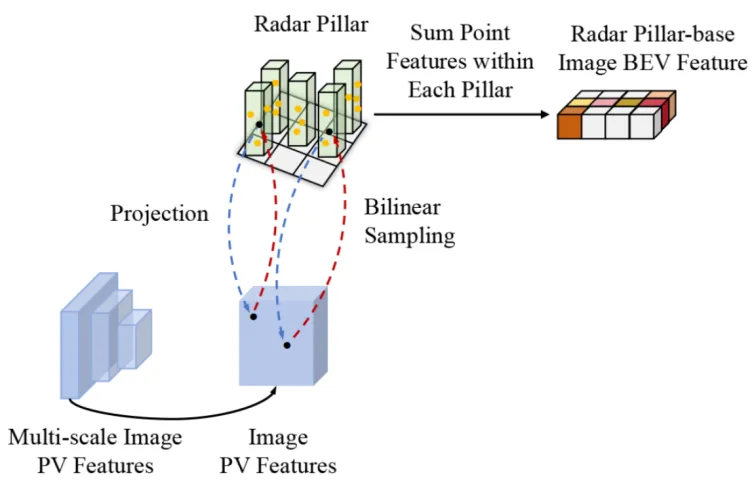
前两步完成了对齐和筛选,但这还远远不够。如果完全依赖预定义网格,会丢失每个雷达点独有的精确位置信息。同润智能开发了雷达柱基视图变换模块(RPVT):直接用4D雷达原始点云里每个点的精确三维坐标,在摄像头图像平面上做双线性插值采样,采样到的图像特征再通过点云特征网络映射回雷达点云的自然分布空间。这一步最大的意义,是能在鸟瞰图视角下保留非常精细的边缘和轮廓信息,对于行人、骑行者、锥桶等这样的小目标尤其重要(组合辅助驾驶系统安全法规强制要求)。
同润智能将这套技术路线总结为“双采样”策略——一次体素级采样,一次点级采样,两种采样互相配合,兼顾了效率与精度。
更值得强调的是同润智能的AI数据闭环能力和端侧优化水平。公司构建了“影子模式”数据闭环系统,量产车回传的脱敏数据实时流入云端AI训练平台,驱动DSFusion算法模型每周迭代。这意味着同润的雷达系统“越开越聪明”,能够持续适应中国复杂的混合交通场景。同时,同润自研的轻量化神经网络推理引擎,将算法模型深度优化后部署在车规级芯片上,实现了毫秒级的端到端感知延迟,用有限的低成本硬件支撑起这套复杂的AI算法运行。
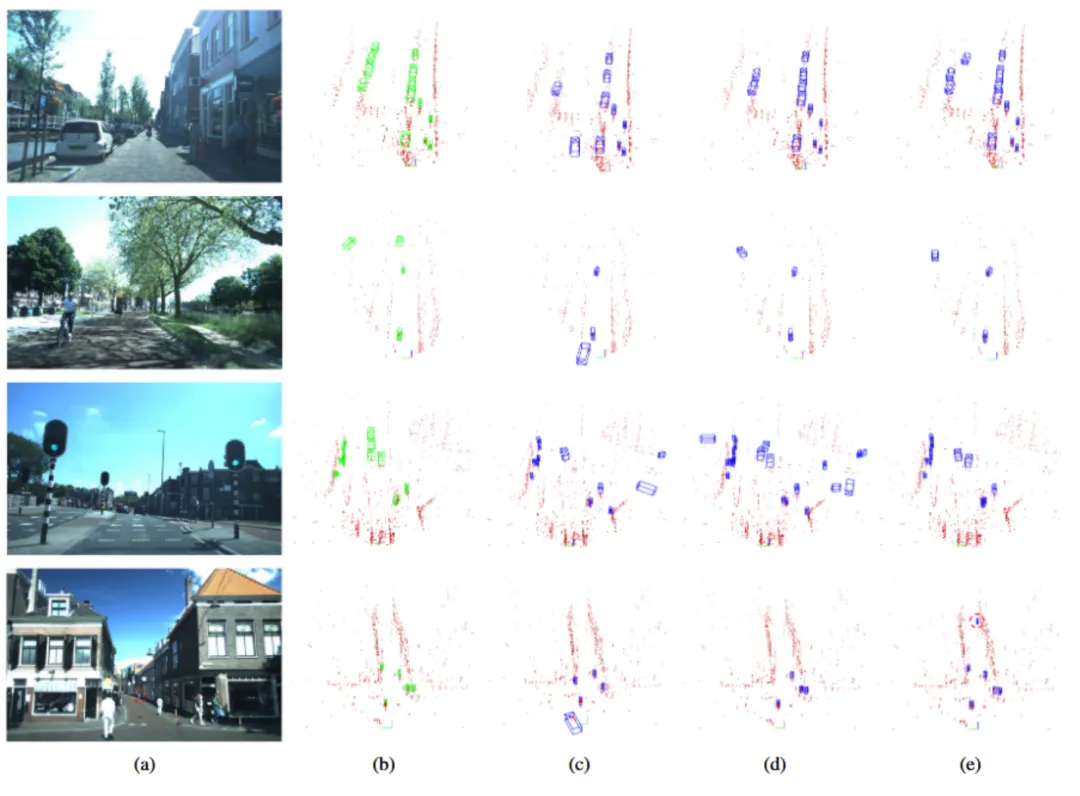
这套方案真正的说服力,不仅来自于学术论文,更来自于实际量产方案的验证。
同润智能研发团队在自动驾驶领域两个最具代表性的公开数据集View-of-Delft(VoD)和TJ4DRadSet上,对DSFusion进行了全面的消融实验和横向对比。
消融实验清晰展示了三大模块的价值:仅加入PVVT,在TJ4DRadSet测试集上,3D目标检测平均精度就提升了4.79%,鸟瞰图平均精度提升了2.63%;三大模块全部启用后,累计带来超过9.65%的精度净增长;在VoD数据集EA区域,完整DSFusion方案使平均精度从51.62%跃升至56.37%,DC区域则从70.22%提升到75.72%。
横向对比更直观。将DSFusion与当前主流的4D雷达-摄像头融合方法(RCFusion、LXL、RCBEVDet等)以及不同线数的激光雷达检测器(16线、32线PointPillars、PV-RCNN、BEVFusion)放在一起比较:
而成本端的对比更为震撼:同润智能4D雷达的批量采购价仅为同级别激光雷达的十分之一左右。以十分之一的传感器成本,逼近高端激光雷达的感知精度——这让那些正在成本核算与安全标准之间艰难博弈的车企,看到了一个明确可行的方向。
在实时性方面,在量产级车规芯片上完成深度优化后,DSFusion推理速度稳定超过15帧/秒,完全满足高端量产智驾系统对低延迟感知的需求。
2025年,强制性国家标准《轻型汽车自动紧急制动系统技术要求及试验方法》结束公开征求意见,计划于2028年1月1日正式实施。
同年,交通运输部发布《营运客车安全技术条件》(JT/T 1094-2016) 行业标准第1号修改单,强制新增AEBS、LDWS功能,15个月过渡期。
强制性国家标准《智能网联汽车 组合驾驶辅助系统安全要求》结束公开征求意见,涉及多种ADAS场景,对雷达提出了更严格的要求,计划于2027年1月1日正式实施。
一系列新法规逐步实施,不仅提升了夜间识别、复杂场景等测试指标,还新增了夜间儿童横穿、摩托车横穿(测试时速高达60km/h)、异形障碍物等“极端不友好”的测试场景,对感知系统在全天候和夜间环境下的可靠性提出了前所未有的挑战。
有业内人士表示,市场上不少搭载纯视觉或低阶雷达方案的车型,在暴雨“鬼探头”场景中要么识别大幅延迟,要么直接无反应,很难通过新国标的强制性测试。
同润智能的量产4D雷达方案,正是为了应对这道法规必答题而生。
针对法规新增的“夜间儿童横穿”和“异形障碍物”等严苛测试场景,同润智能4D雷达+视觉融合方案在实车验证中已通过了多轮严苛的场景测试,具备全场景可靠识别能力。4D雷达本身不受光照和恶劣天气干扰的特性,辅以AI多模态点云增强算法对低分辨率点云的精确特征补偿,确保了其在低能见度和复杂光线条件下的感知稳定性。这在很大程度上解决了主机厂普遍面临的“纯视觉方案怕恶劣天气、激光雷达方案成本太高”的两难困局,为15万级车型普及高阶智驾扫清了感知硬件和合规层面的核心障碍。
在攻克算法难关后,同润智能迅速完成了从实验室样机到车规级量产的跨越。目前,同润智能的4D成像雷达核心产线已在安徽芜湖智能工厂全面投产,整套技术方案已经获得了行业头部车企的量产验证。
产能规模:依托自建的全自动化标定与测试产线,同润智能已具备年产数十万颗4D成像雷达的交付能力,实车通过率100%,完全满足主流车企对供应链稳定和品控的高标准要求。
量产定点:该产品已正式实现多家头部车企主力车型的量产交付,配套方案正在向多款车型延伸。搭载同润智能4D雷达的量产车辆已在多个复杂工况下展开大规模道路验证,性能表现稳定可靠。
工程优化:针对量产车辆复杂的电磁环境,同润智能对雷达架构进行了深度EMC(电磁兼容)优化和热管理系统设计。产品在-40℃至85℃的极端温差条件下,仍能保持高稳定性的点云输出数据,真正实现了“出厂即可靠,上车即稳定”。
从同济大学实验室的前沿研究,到4D毫米波雷达智能工厂的全自动化产线;从顶级学术期刊发表的算法,到正在多地展开大规模道路验证的量产车型——同润智能走过的这条路,正是智能驾驶感知赛道从“论文突破”走向“产业落地”的一个生动缩影。
全球主流半导体厂商已在多通道毫米波雷达芯片展开密集布局,分布式AI成像雷达,正成为决定自动驾驶安全冗余与决策上限的核心技术变量,同润智能正加速下一代高分辨成像雷达多模态方案量产落地,启动自动驾驶全天候感知新纪元,推动智能驾驶感知系统跨越临界点,为L3及L4级自动驾驶的规模化落地铺平道路。
同润智能不仅是技术解决方案提供商,更致力于成为支撑中国智能驾驶量产进程的“核心Tier 1”。在安全标准不断升级、成本压力持续高压的行业格局下,4D雷达+摄像头融合+先进AI算法的技术路线,正成为智驾感知方案的主流选择之一。
本文内容基于同润智能研发团队发表的论文“Dual‑sampling feature fusion for three‑dimensional object detection using four‑dimensional radar and camera”(Engineering Applications of Artificial Intelligence, 2025)及公司量产数据整理分析。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
