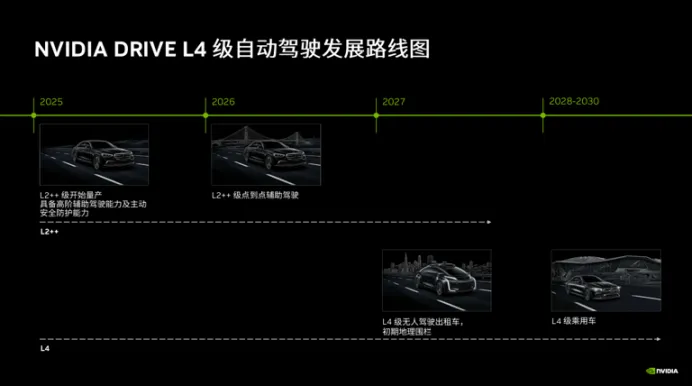
2026 北京车展,英伟达抛出清晰且强势的自动驾驶时间表:2026 年美国主要城市落地 L3,2027 年联合 Uber 启动 L4 试点,2028 年洛杉矶奥运会规模化运营 L4 服务。三年三步棋,精准踩点商业化关键节点。而比时间表更具深意的,是英伟达全球副总裁吴新宙的核心判断 ——视觉是上限,激光雷达是底线。
一、技术路线:视觉优先,绝不 “赌” 纯视觉
在自动驾驶路线争议中,英伟达立场明确:视觉优先,但不迷信纯视觉。吴新宙直言:“视觉系统的像素密度和感知上限,潜力远未被挖尽。” 但他随即强调:“L3/L4 必须靠激光雷达做冗余,这是行业共识”。直白来说:日常靠视觉高效感知,关键时刻激光雷达兜底防错。英伟达的理性很清晰:L2++ 可尝试纯视觉降本,但 L4 级无人驾驶绝不能 “单腿走路”——安全冗余,是高阶自动驾驶的绝对前提。
二、核心杀手锏:会 “思考” 更会 “解释” 的 Alpamayo 模型
如果说硬件是英伟达的骨骼,那 2026 CES 发布的Alpamayo 开放端到端模型,就是它的 “大脑与嘴巴”。
1. Alpamayo 是什么?
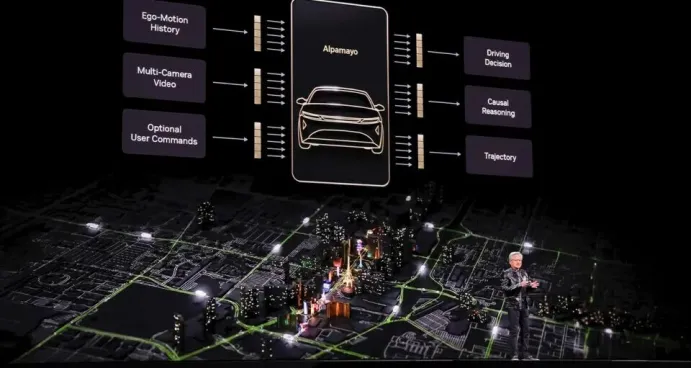
全称 NVIDIA Alpamayo,是集成 AI 模型、仿真框架(AlpaSim)、物理 AI 数据集的开放式产品组合,专为 L4 级自动驾驶打造NVIDIA。
- 核心能力:让车辆以类人判断完成感知、推理、行动,还能解释决策逻辑(可解释性),满足安全验证与监管要求NVIDIA;
- 关键动作:全栈技术开放—— 开源模型权重、仿真工具、数据集,降低行业开发门槛。黄仁勋的逻辑直白:“我不怕你用我的技术抄作业,我怕你不用我的技术。”
2. 双系统并行:AI “动脑”+ 规则 “兜底”,比你更怕你犯错
英伟达量产方案藏着关键设计:端到端 AI 模型 + 传统规则算法,双系统同时运行。
- 异常工况(AI “抽风”/ 决策模糊):规则算法立即接管,强制执行保守安全策略,杜绝事故。吴新宙明确表示:“即使客户模型存在缺陷,系统也能通过规则算法避免事故”。本质上,英伟达卖的不是单一技术,而是 **“容错能力 + 安全兜底” 的全套保障 。
三、生态野心:“三台计算机 + 五层蛋糕”,做不可或缺的选项
英伟达的目标从来不止于卖芯片,而是构建全栈开放生态,让自己成为行业 “必选项”。
1. 三台计算机架构(全域算力支撑)
- 车端推理计算机(AGX):搭载 Orin/Thor 芯片,负责实时驾驶决策;
- 云端训练计算机(CUDA 生态):海量数据训练模型,持续迭代优化;
- 仿真测试计算机(NuRec):高保真场景仿真,日均 200 万次验证,加速安全落地。
2. 五层蛋糕服务体系(全链路开放)
从底层到顶层,层层开放、自由组合:
- 硬件层:标准化 Hyperion 平台(含传感器、计算单元);
- 系统层:Halos OS 安全操作系统(ASIL D 级安全认证);
- 模型层:开放 Alpamayo VLA 推理模型;
- 基础设施层:Cosmos 数据工厂 + Omniverse 仿真平台。这套组合拳下,车企可按需选用:只用芯片、只用云端训练、只用仿真平台,甚至特斯拉这类自研芯片玩家,也能接入英伟达生态。黄仁勋的定位很清醒:“我们不追求垄断,但希望成为不可或缺的选项。”
四、阳谋逻辑:开放中掌控,安全中共生
英伟达的布局,是一套无懈可击的 “阳谋”,逻辑清晰且无法绕开:
- 技术不赌单一:视觉 + 激光雷达双保险,兼顾效率与安全,适配 L3/L4 全场景;
- 模型开放可解释:降低信任门槛与开发成本,吸引全行业共建,标准由我主导NVIDIA;
- 系统双栈兜底:AI 创新 + 规则防错,解决车企 “怕出事” 的核心顾虑,降低落地风险;
- 生态开放不锁死:分层授权、自由组合,不强迫绑定,反而让车企离不开。
三年后,当 L4 级 RoboTaxi 在洛杉矶奥运会穿梭时,人们或许不会察觉:这些车辆的 “大脑”,大概率印着英伟达的印记 ——既聪明到能引领行业,又保守到能守住安全底线,这正是英伟达自动驾驶 “阳谋” 的终极奥义。