Behavioral changes to repeated takeovers in automated driving: The drivers’ ability to transfer knowledge and the effects of takeover request process
自动驾驶中重复接管的行为变化:驾驶员知识迁移能力及接管请求过程的影响
作者:Stefan Brandenburg, Fabienne Roche
1.引言
随着SAE L3级自动驾驶系统逐步部署于公共道路,驾驶员需在系统达到运行边界时接管车辆控制,这一接管过程在可见度变化等复杂场景下的安全性与适应性日益受到关注。由于自动化允许驾驶员从事非驾驶相关任务(NDRTs),其情境意识下降,首次接管往往表现出较大的反应变异性。以往研究多聚焦于单次接管行为,且缺乏对多次接管中驾驶员适应性变化及跨情境知识迁移能力的系统探讨。本研究采用固定基座驾驶模拟器,在重复出现的施工区接管场景中,系统考察驾驶员的适应行为与迁移行为,并比较一步与两步接管请求过程对接管绩效及主观评价的影响,揭示驾驶员经验积累与场景泛化机制,为稳健接管请求界面设计提供实证依据。
2.研究内容
本研究采用固定基座驾驶模拟器实验,结合驾驶行为指标与主观量表,系统探究了驾驶员在重复接管情境下的行为适应与知识迁移能力;研究设计包含相同可见性(雾或无雾)的适应阶段与可见性变化的迁移阶段,并比较了一步法与两步法接管请求过程的效果。
3.研究方法
3.1参与者
本研究共招募了40名参与者,所有参与者均完成了三次连续的接管试验。因5名参与者的驾驶数据记录缺失,最终数据纳入主观评分的参与者有40名,数据纳入驾驶行为分析的参与者有35名(女性19名)。
3.2实验材料
固定基底驾驶模拟器由车辆模型构成,包括可调节驾驶员座椅、力反馈方向盘、加速与制动踏板,以及两个5英寸显示器(用作左后视镜与内后视镜)。车速与转速显示于方向盘后方的显示器。采用SILAB™ 5.0软件,在2×1.80米背投屏幕上呈现包含树木、山脉、房屋等元素的双车道乡村道路。屏幕置于模型前方约2.5米,提供约140度视场角。一台平板电脑安装于参与者右侧,用于执行非驾驶相关任务(NDRT,图1)。
NDRT为问答游戏,问题依次显示,每项含三个选项,选自棋盘游戏Cranium。参与者通过点击选择答案,选后或超20秒后出现下一问题。该任务所需认知、操作与视觉资源与使用智能手机类似。
驾驶情境关键性采用单维7点李克特量表评估,选项从“完全非关键”(-3)到“完全关键”(3)。感知努力采用单维量表评估,参与者在10厘米垂直线上划叉评分,左侧刻度0–220(最大努力),右侧7点言语锚定(“几乎没有努力”至“超常努力”)(图2)。

图1 驾驶模拟器的设置
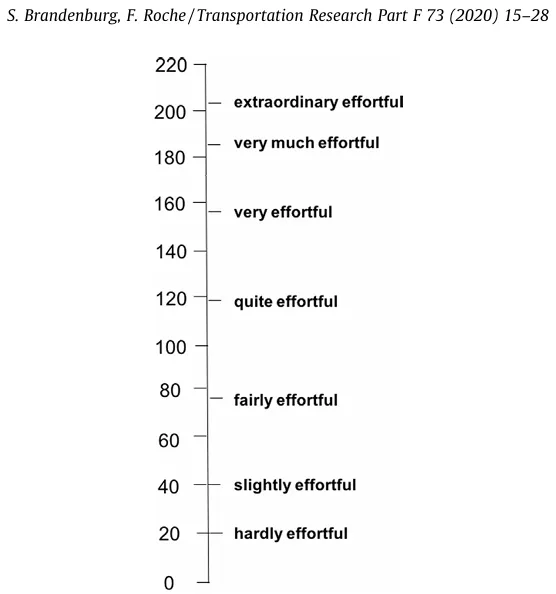
图2 感知努力的单维尺度
3.3 实验流程与实验设计
参与者到场后签署知情同意书,并通过5分钟手动驾驶练习熟悉模拟器及NDRT。练习道路为单车道乡村公路,能见度良好。随后,实验人员解释接管请求并指导参与者练习一次接管:启动自动驾驶,车速达80 km/h后发出接管请求,要求参与者尽可能快速准确地接管,未指定具体操作方式,最后说明测试中可能出现雾天。
测试中,所有参与者均在笔直的单车道乡村道路上行驶。每次试验中,模拟车辆自动加速至80 km/h,随后参与者开始执行NDRT。行驶2500米后,车道前方出现施工区,需恢复车辆控制。一半参与者经历两步接管请求:第一步在施工区前240米(10.8秒)呈现单音提示及“警告:前方道路施工,请尽快接管”的文本;第二步在施工区前70米(3.2秒)呈现相同单音及“警报:请立即接管”信息(图3)。另一半参与者仅经历第二步。

图3 有雾(左)和无雾(右)警报的可视化对比图
通过施工区后,参与者停下模拟车辆,并对接管情境的关键性以及自身感知努力程度进行评分。每次实验试验持续约2分钟。图4展示了单次试验的序列。
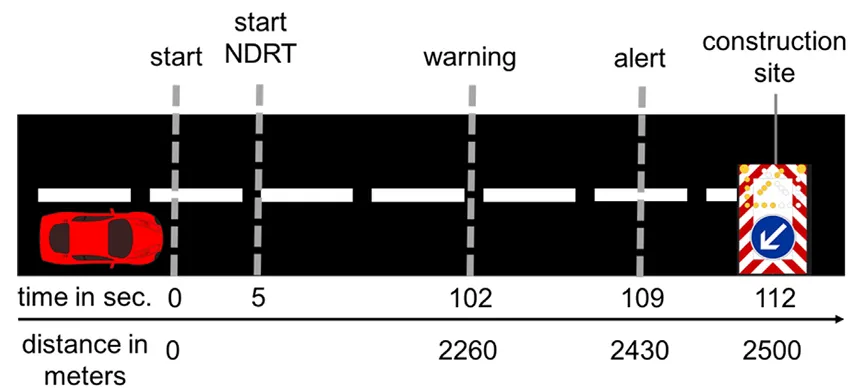
图4 实验试验序列的示意图
本研究将参与者分为适应条件组与迁移条件组。适应条件下,连续三次试验的接管情境完全相同,旨在考察参与者随经验增加而产生的行为变化。迁移条件下,前两次试验情境相同,第三次试验的能见度发生改变;参与者前两次试验按适应条件的流程熟悉情境,第三次则面对全新能见度条件。若参与者虽遇天气变化仍能维持操作水平,则存在迁移效应;若第三次试验中接管行为改变,则视为对新情境的适应过程启动,而非迁移效应。通过比较适应条件与迁移条件下从第二次到第三次试验的变化,判断行为迁移是否发生。
实验设计为 3(试验次数:1、2、3)× 2(行为变化:适应/迁移)× 2(TOR过程:单步/两步)的混合设计,其中试验次数为被试内因素,行为变化与TOR过程为被试间因素。施工区前对向车道车辆数量在4至16辆间变化以增强模拟真实性。因变量包括:接管时间(TOT)、最小碰撞时间(TTCmin)、最大纵向减速度(m/s²)、最大方向盘转角(度),以及每次试验后的关键性评分与感知努力评分。
TOT以秒为单位进行测量,从首次呈现接管请求开始,到驾驶员对方向盘、制动踏板或加速踏板产生首次输入(接管)为止。TTCmin 通过将模拟车辆至危险点的距离(米)除以即时速度(米/秒)计算,时间窗口从驾驶员接管至通过危险点,用以量化接管情境的关键性。最大纵向减速度与最大方向盘转角亦按相同流程计算。所有运动学指标均基于参与者从接管到施工区的数据提取。
4.研究结果
共获得120个数据点用于主观评分的分析。5名参与者的驾驶数据缺失,因此驾驶行为分析共纳入105个数据点。发生碰撞2次,一次碰撞施工区,一次碰撞防撞护栏,均发生在迁移条件下第三次试验的单步TOR情境中。这两个试验在分析TTCmin时被排除,以免结果产生偏差。最终,TTCmin分析共纳入103个数据点。
驾驶数据分析分为两个步骤。首先对数据进行预处理,接对每个因变量进行方差分析。采用Mauchly检验对试验次数因子的球形假设进行检验,使用Greenhouse-Geisser方法对自由度进行校正(表1、表2)。
表1 主要影响及互动对参与者接管行为和主观评分的影响表
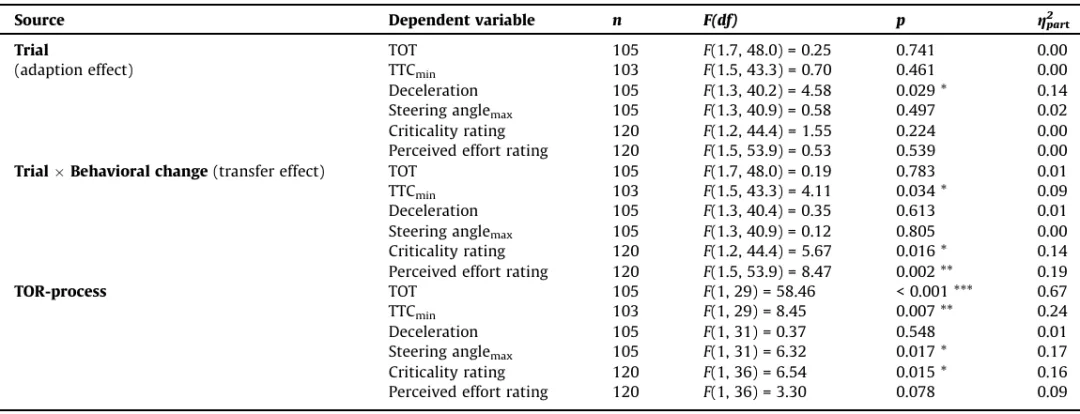
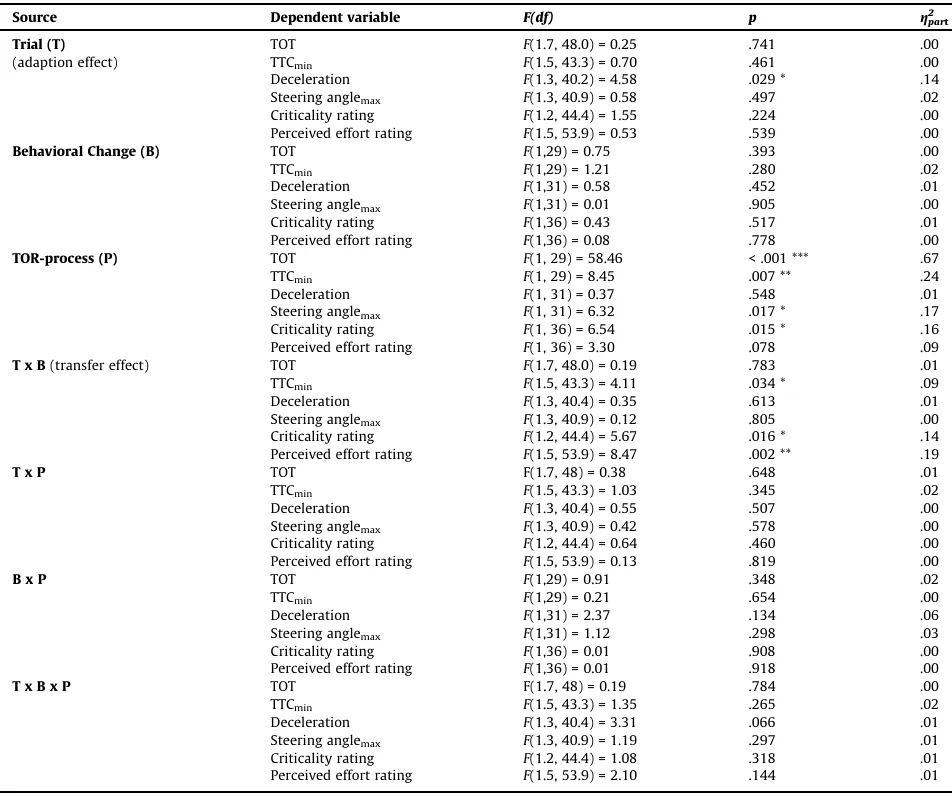
表2 实验参与者接管行为及主观评价的试验、行为变化和TOR过程分析的完整结果表
4.1 重复接管请求的适应效应
方差分析结果显示,试验次数对最大减速度的主效应显著。图5a显示,参与者的减速度随试验次数增加而增强。事后检验显示,第一次试验与第三次试验之间差异显著。此外,在适应条件下,参与者的最小碰撞时间、关键性评分和感知努力评分在描述性水平上随试验次数增加而降低(图5b、图6a和图6b),但这些差异未达到显著水平。未发现试验次数的其他主效应。
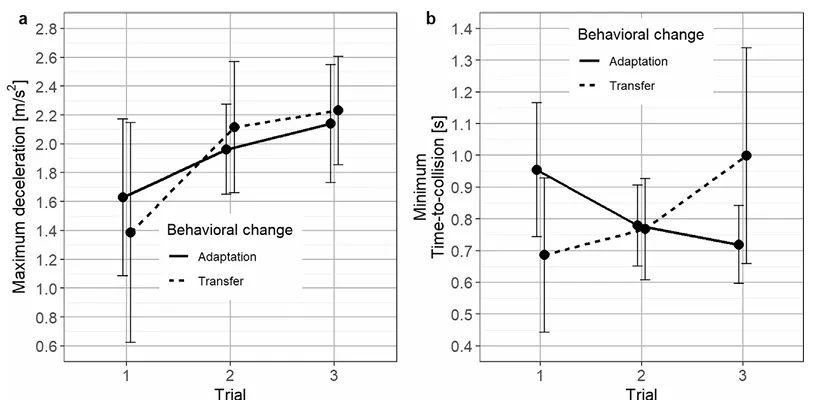
图5 试验中不同可见性特征对最大减速度和最小碰撞时间的影响
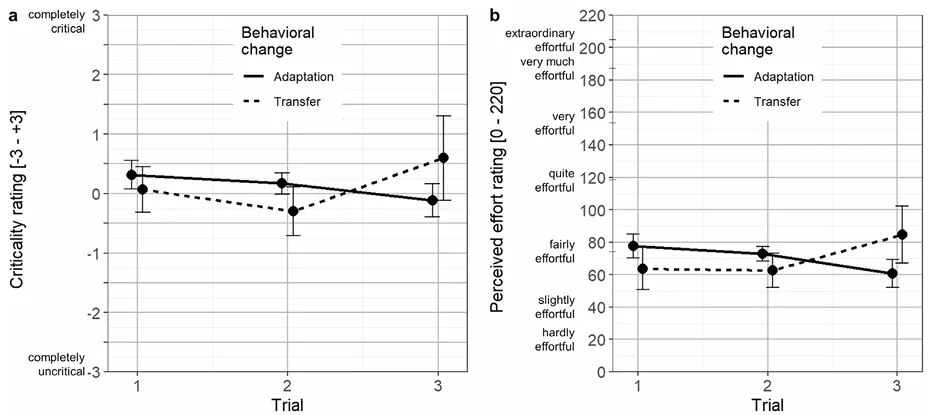
图6 试验中不同可见性特征的情境下的摄入效应对关键性和感知努力评分的影响
4.2 迁移效应
行为变化(适应/迁移)与试验次数的交互作用在最小碰撞时间上显著。适应条件下,最小碰撞时间随试验次数持续下降,迁移条件下第三次试验时有所上升,但事后比较不显著。关键性评分与感知努力评分亦存在显著交互,从第二次至第三次试验,迁移条件下两项评分均呈上升趋势,而适应条件下呈下降趋势。推测迁移条件下评分的上升可能与第三次试验从无雾转为有雾有关,但事后t检验显示,第三次试验中有雾与无雾条件下的关键性评分与感知努力评分均无显著差异,故可排除天气变化的影响。
4.3 接管请求过程的影响
描述性分析显示,在两步TOR条件下,66.6%的参与者在第二步TOR之前即完成接管,33.3%在第二步TOR之后完成接管。接管请求过程对参与者的接管行为存在显著的主效应。与两步TOR相比,单步TOR导致的接管时间显著更短(统计结果见表1与表2,可视化呈现见图7a)。然而,单步TOR条件下的最小碰撞时间小于两步TOR条件(图7b)。单步TOR条件下的最大方向盘转角大于两步TOR条件(图7c)。此外,与两步TOR相比,参与者在单步TOR条件下的关键性评分显著更高(图7d)。接管请求过程对感知努力评分未产生影响。
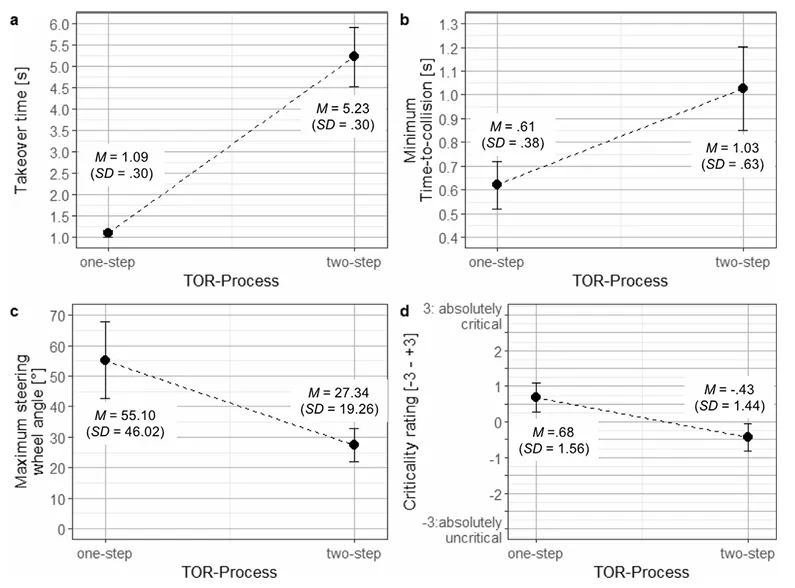
图7 接管请求过程对接管时间、碰撞最短时间、方向盘最大转角,以及、关键性评分的主要影响
5.结论
本研究通过驾驶模拟器实验,系统考察了驾驶员在多次接管请求中的行为适应与知识迁移能力。首先,结合接管时间、最小碰撞时间、减速度、转向角及主观努力度和危急度评分,量化了重复经历相同能见度情境下的行为变化。其次,通过改变雾天条件,验证了驾驶员能够将已习得的接管行为迁移至不同能见度情境,但迁移过程中感知努力与危急度显著升高。此外,两步式接管请求(预警+警报)相比一步式接管请求,虽延长了接管时间,但显著提升了最小碰撞时间、减小了最大转向角并降低了危急度评分。研究证实了驾驶员具备跨情境行为迁移能力,并为设计安全高效的接管请求系统、提供了实证依据,尽管样本以低里程年轻驾驶员为主,结论仍需在真实道路与多样化场景中进一步验证。
6.文献出处
Brandenburg, S., & Roche, F. (2020). Behavioral changes to repeated takeovers in automated driving: The drivers’ ability to transfer knowledge and the effects of takeover request process. Transportation research part F: traffic psychology and behaviour, 73, 15-28.
7.点评
本研究通过驾驶模拟器实验,结合行为绩效与主观评测量表,创新性地考察了驾驶员在重复接管情境下的行为适应性与知识迁移能力,并对比了一步与两步接管请求过程对安全性的影响,为L3级自动驾驶人机交互设计提供了实证依据。但研究受限于固定基座模拟器、单一接管场景(施工区)及被试驾驶经验分布不均,且未深入探讨不同非驾驶相关任务类型及更长自动化时程对迁移效果的调节作用,未来可拓展至真实道路环境、多变的交通密度与能见度条件,并解析驾驶员的认知负荷与信任演变的交互机制,以提升接管请求系统的适应性与鲁棒性。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 徐立丽
审核丨 张秀伟
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
