特斯拉正在不断完善和改进其Robotaxi项目,现在将对该套件的智能手机应用程序部分进行一些彻底的改变。
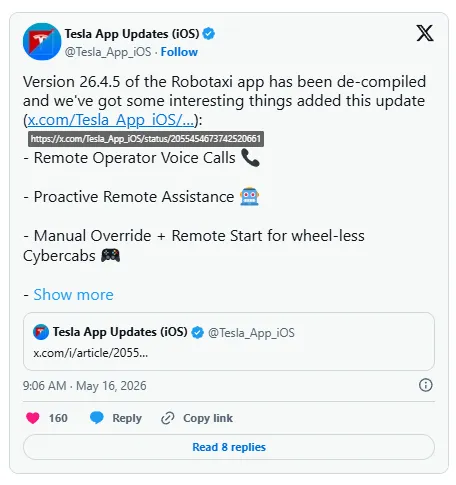
该公司计划通过发布 Robotaxi 应用26.4.5 版本进行一些重大变革,该版本最近已被 Tesla App Updates on X 反编译。此次更新揭示了大量新代码,重点在于远程操作、安全协议和无缝的自动驾驶叫车服务。
这些改进显然表明特斯拉正准备扩大无人驾驶Cybercab的部署规模,尤其是已在量产车中亮相的无方向盘版本。这些改进旨在提供可靠的体验,在需要时为乘客提供支持,同时提升运营效率。
远程操作员语音通话
其中一项显著的新增功能是支持远程操作员语音通话。该应用程序现在包含一个专用的原生语音通信系统,乘客可以通过车辆座舱内的麦克风和扬声器直接与特斯拉远程操作员连接。
这项功能可在行驶过程中提供实时帮助,解决导航问题或舒适度调整等需求,而不会中断自动驾驶旅程。它基于现有的支持协议,使人工干预更加便捷直观。
主动远程协助
此次更新引入了主动式远程协助功能。系统无需等待乘客发起请求,即可根据监测到的情况预测并提供帮助。
这可能包括建议更改路线、调整车内温度或应对潜在的延误。通过将人工智能驱动的监控与人工监督相结合,特斯拉旨在提供更流畅、更贴心的体验,超越传统的共享出行服务。
无方向盘网约车的手动控制和远程启动
无轮Cybercab车队的一大亮点是手动控制和远程启动功能。车队运营人员和技术人员现在可以临时控制或远程启动没有方向盘的车辆。这对于低速行驶至关重要,例如将车辆从狭窄的停车位驶出,甚至进行维护保养。
出于安全考虑,控制措施受到严格限制——通常速度低于 2 英里/小时——以确保这些干预措施仍然只是紧急措施。
特斯拉正在增加一个安全的“启用手动驾驶”模式,该模式将允许车队运营商或其他人员暂时接管车辆控制权。
此外,还具备远程启动功能,可授权空车自行启动无人驾驶行驶。
网约车和调度功能
车辆调度功能已得到增强,新增了智能匹配和多目的地支持。该应用程序能够智能地将乘客与可用的网约车进行匹配,并支持单次行程前往多个目的地。
这优化了车队利用率,减少了等待时间,提高了共享出行的效率。软匹配可能考虑了距离、乘客偏好和车辆可用性等因素,以提高用户满意度。
乘客与车厢同步,实时路线规划
全新的同步工具让乘客可以通过手机上的应用程序直接镜像并控制车厢内的设置,例如座椅、空调和娱乐系统。实时路线更新会根据交通或路况动态调整,而动态安全监控则会持续评估周围环境。
现在,该应用程序可以直接将更新推送至主屏幕,从而实现中央显示控制。此外,还有一个专用的导航协议,可以共享道路封闭和施工的精确坐标,这可以防止车辆被困,避免需要手动操控。
这些功能创造了一种连贯、响应迅速的体验,使车辆和应用程序能够和谐运作。
终止开关
特斯拉拥有一项高安全级别的指令,可以完全冻结车辆的行驶能力。这项指令允许特斯拉出于任何原因将该车辆从自动驾驶出租车车队中移除,并且即使拥有正确的设备(例如有效的钥匙),也无法启动车辆。




 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
