👆点击上方“蓝字”关注信鸽笔记了解更多精彩内容
今天是坚持的第132/365天
据统计,雨雪等恶劣天气下的行车事故率,比正常天气高出70%。
风沙、浓雾、雨雪,无一不在干扰路况条件、驾驶员视野和场景判断。无论新手还是老司机,雨雪天开车都是一场噩梦。
而对于“模仿”人类驾驶的自动驾驶汽车,恶劣天气对环境感知系统的影响更为致命。能否在恶劣天气下正常行驶,已成为检验自动驾驶能否真正上路的终极“试金石”。
就在3月,美国国家公路交通安全管理局(NHTSA)日前宣布,升级对320万辆搭载FSD(完全自动驾驶)辅助系统的特斯拉汽车的调查。
此次调查聚焦FSD系统的低能见度隐患-特斯拉纯摄像头视觉系统无法检测眩光、灰尘等障碍物,且摄像头性能下降时预警滞后,直至碰撞前才提示。目前已发现9起相关疑似事故,含1起致命、2起伤人事故,另有6起事故正排查关联。

单一传感器,其实各有各的“软肋”
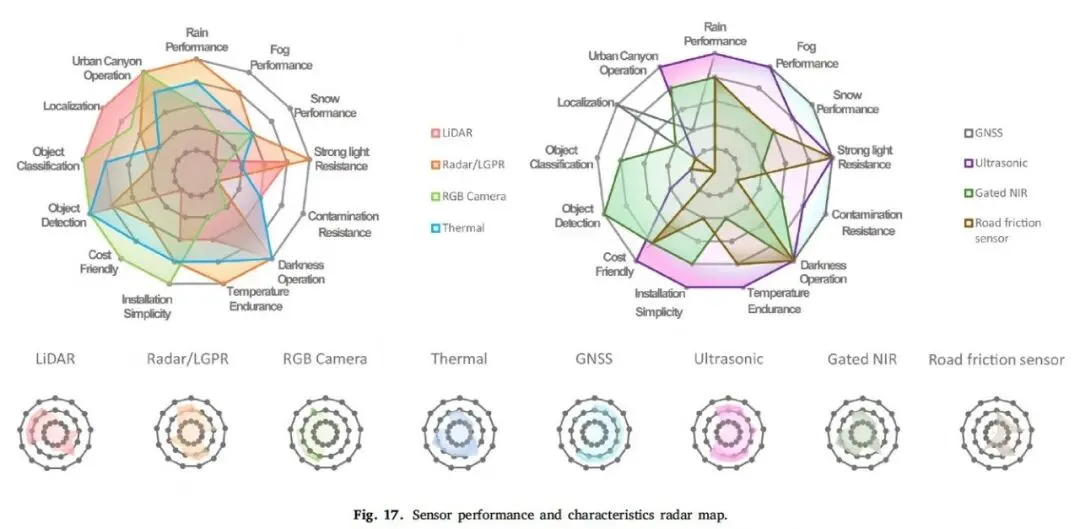
在恶劣天气下,没有任何一种传感器是完美的。根据综述论文《Perception and sensing for autonomous vehicles under adverse weather conditions: A survey》:
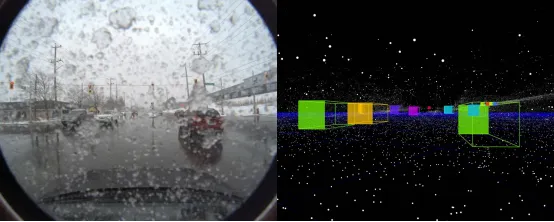
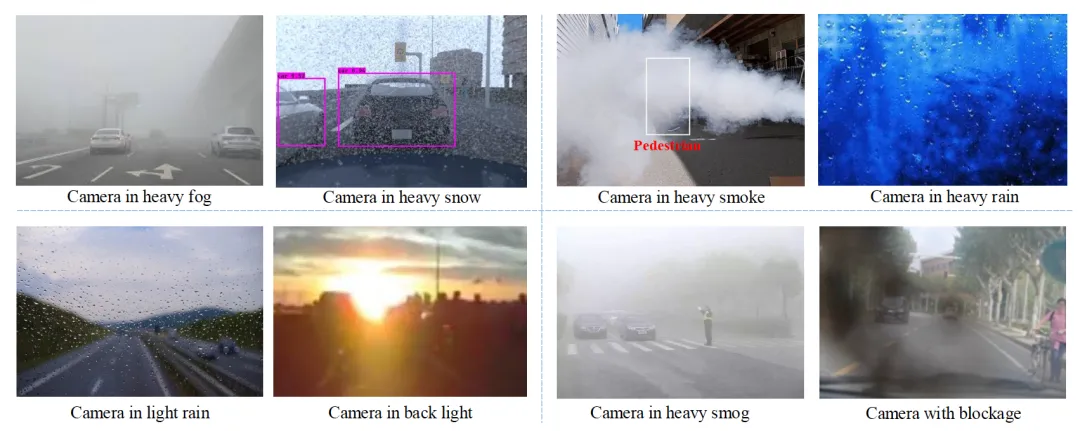
可见光相机:易受水滴遮挡、雾气模糊、积雪覆盖和强光干扰,导致图像信息严重丢失。
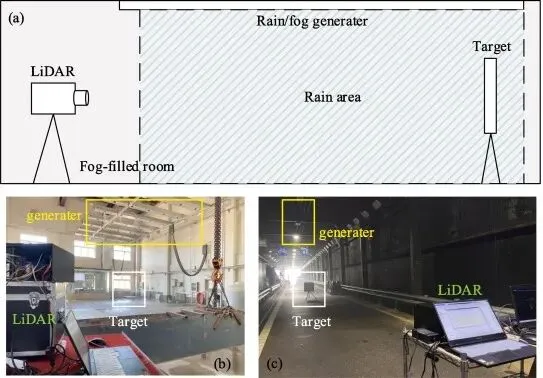
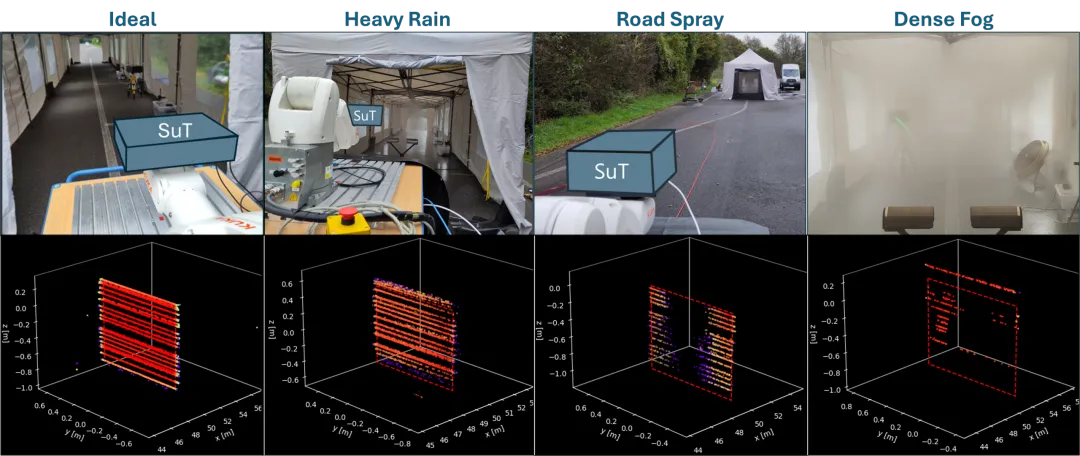
激光雷达:雨雪和雾霾会引入大量噪声,降低点云密度和有效探测距离,甚至产生虚假障碍物。
毫米波雷达:虽穿透能力最强,但空间分辨率低,难以准确识别物体形状和类别。
截至目前,大多数研究集中在单一传感器的性能提升、滤除算法优化或多传感器融合策略上。然而,有一个更基础、更关键的问题被长期忽略了-定量准确的性能评估。
被忽略的关键:性能评估,不能各说各话
简单总结就是:每一个实验室测出的传感器性能衰减曲线都不一样,那我们该如何建立统一的算法或融合策略?
更关键的是,性能边界是自动驾驶ODD(运行设计域)定义和SOTIF(预期功能安全)触发条件的最关键基础。
没有统一、可复现的性能评估方法,就谈不上可靠的上路决策。
好消息:ISO系列国际标准已正式进入立项
2025年,相关工作已开展预研。
就在本周,由中国牵头的两项国际标准正式进入TC22立项流程:
Part 1:恶劣天气条件的定义、分类和测量Road vehicles - Perception sensor under adverse weather conditions - Part 1: Definition, classification, and measurement of adverse weather conditions
Part 2:雨雾环境下的性能测试Road vehicles - Perception sensor under adverse weather conditions - Part 2: Performance testing under rain and fog
这一系列标准从预研之初,就得到了德国、韩国、芬兰、法国等多个国家的密切关注和积极参与。
从“各自为战”到“统一标尺”
相比于既有的单一项目或技术报告,这次的标准定位是系列标准。
我把它类比为智能网联汽车进入全天候场景的“新DV/PV测试”。
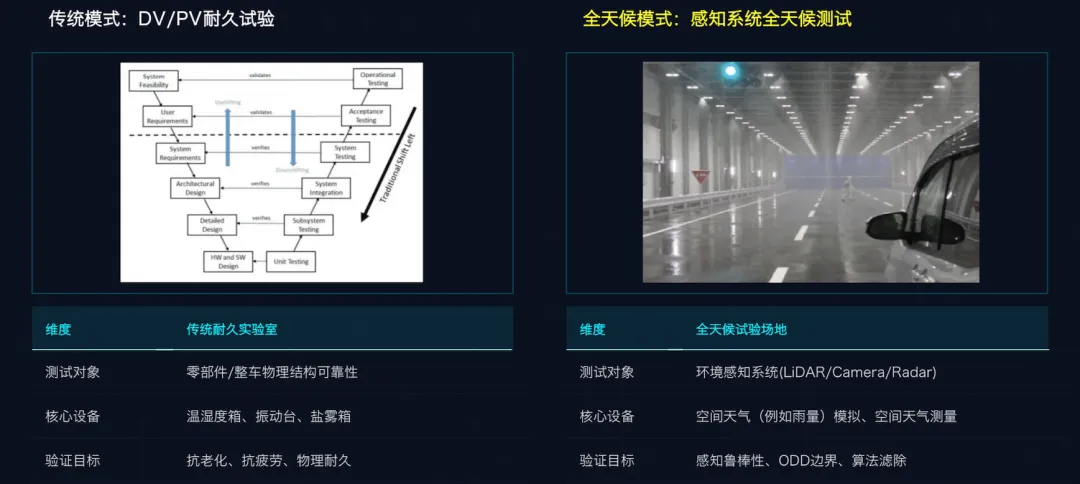
该系列标准将从以下维度进行全方位描述和规范:
目标是:为自动驾驶的“最后一公里”-全天候、全场景安全行驶,提供坚实的支撑。
欢迎大家点赞、留言,这是我坚持的动力,我们明天再见✊
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
