ISO26262自动驾驶方程式赛车EBS设计(下):全流程安全分析
- 2026-06-21 18:39:01

摘要:本文分为“上、下”两个部分,此为文章“下部分”,我们将基于ISO 26262第三部分规范完成全流程安全分析;并结合分析结果逐一回答五项研究问题。
文章“上部分”已发布,主要介绍了功能安全基础知识与ISO 26262标准体系;并详细说明紧急制动系统软硬件结构。
原文作者:MARKUS BÖLANDER
原文标题:Design and Safety Analysis of Emergency Brake System for Autonomous Formula Car
编译:猿东东,猿西西

04. 概念阶段(ISO 26262 Part3)
本章依托ISO 26262第三部分规范,以EBS Supervisor(紧急制动监控软件)为分析对象,依次完成项目定义、HARA危害分析、功能安全概念、技术安全概念全流程落地,输出各环节分析成果。
4.1 项目定义
项目定义完整描述待分析对象功能、跨零部件交互、环境工况,输出文档作为HARA分析基础,内容分为7小节。
4.1.1 项目范围
紧急制动监控软件部署在dSpace MicroAutoBox控制器内,用于KTH FS无人驾驶赛车故障监测、上电自检、制动航向控制;软件在Simulink完成架构设计,编译C程序烧写入控制器CPU。
4.1.2 整车层级系统概览
dSpace控制器布置在驾驶座椅下方,由整车低压蓄电池供电;和外部器件通过CAN总线、以太网、模拟信号线交互,整车系统拓扑见图4.1。
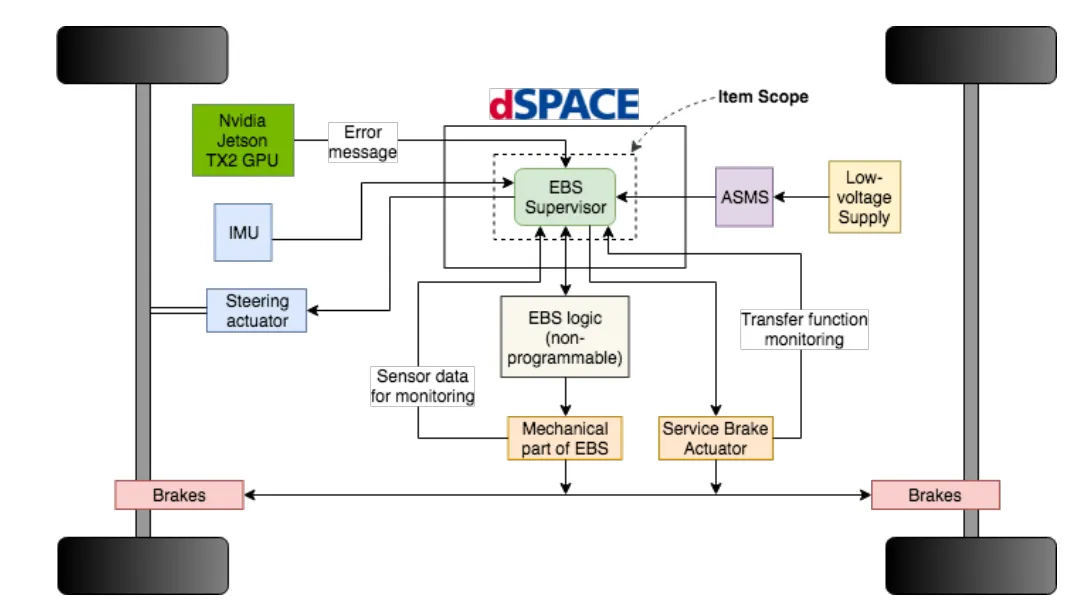
图4.1:整车系统概览
4.1.3 与外部单元信号交互
输入信号汇总(表4.1)、输出信号汇总(表4.2),系统信号拓扑见图4.2;信号后缀NOT代表逻辑取反(非),安全设计逻辑:正常工况持续发送有效电平,信号线断路直接判定故障、触发制动。

表4.1:监控单元输入信号清单

表4.2:监控单元输出信号清单
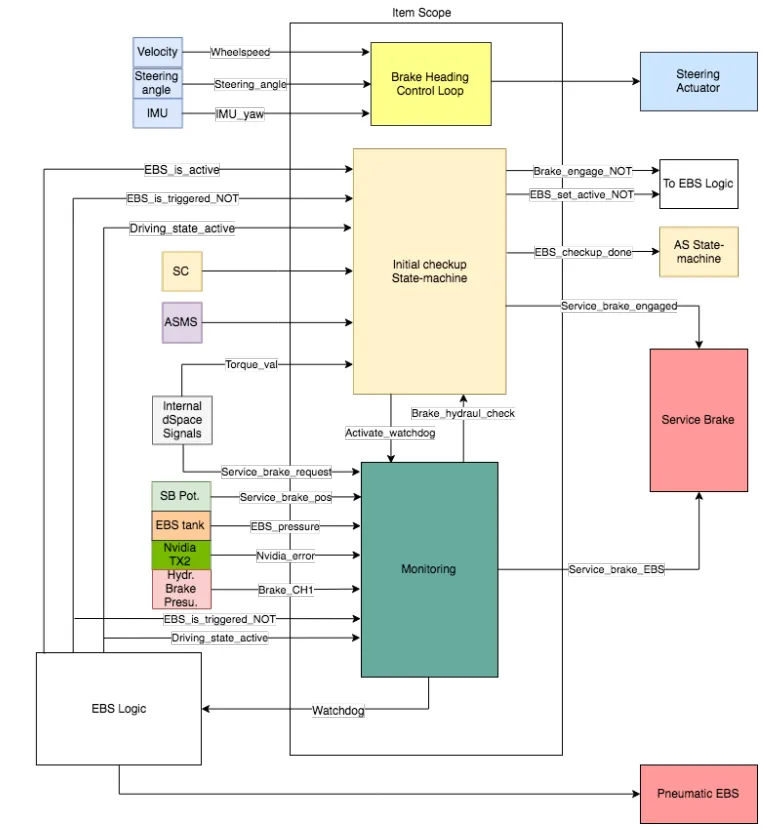
图4.2:系统及信号原理图

4.1.4 关联零部件功能说明
1.EBS硬件逻辑:分立器件搭建无CPU硬件回路,原理图见图4.3;依靠多路与逻辑电路实现:任意关键信号丢失直接打开EBS电磁阀、释放气压制动。
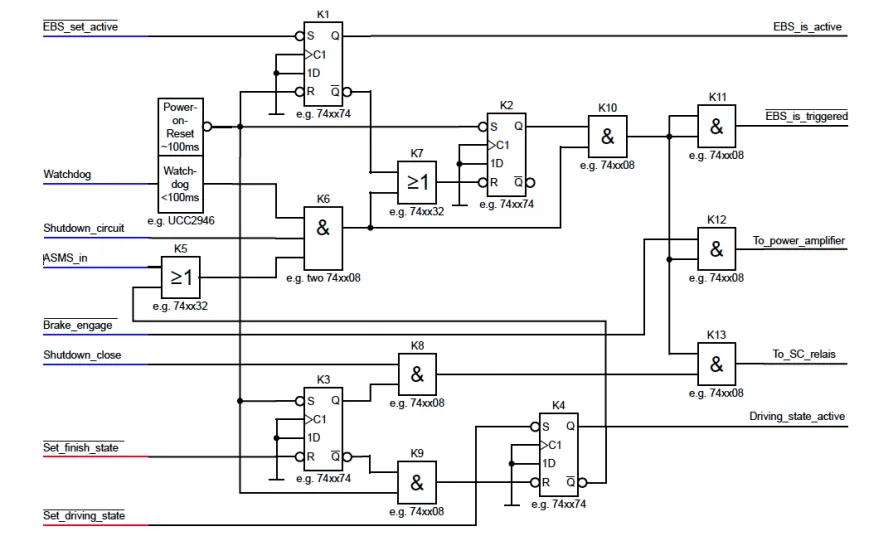
图4.3:EBS控制逻辑总览
2.气动制动本体:二位三通常开电磁阀+ CO₂高压气瓶+拉线气动缸;电磁阀得电关闭封闭气源,失电/断电打开、气压推动气缸拉动制动踏板(CAD安装结构见图4.4)。
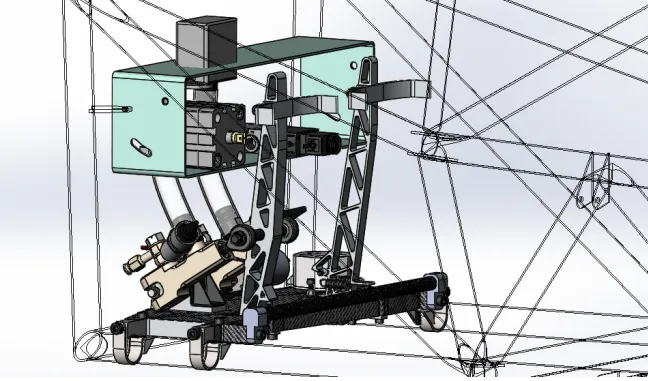
图4.4:抓取样机CAD结构图
3.伺服行车制动:伺服电机拉线踩制动踏板,常规自动驾驶减速使用,气动系统失效时作为冗余紧急制动。
4.dSpace主控单元:整车核心处理器,实现IO采集、算法运算,紧急监控软件集成于此。
5.整车切断回路:控制高压储能隔离继电器(AIR)线圈通断,闭合后牵引电机高压上电,EBS系统串入切断回路拓扑见图4.5。
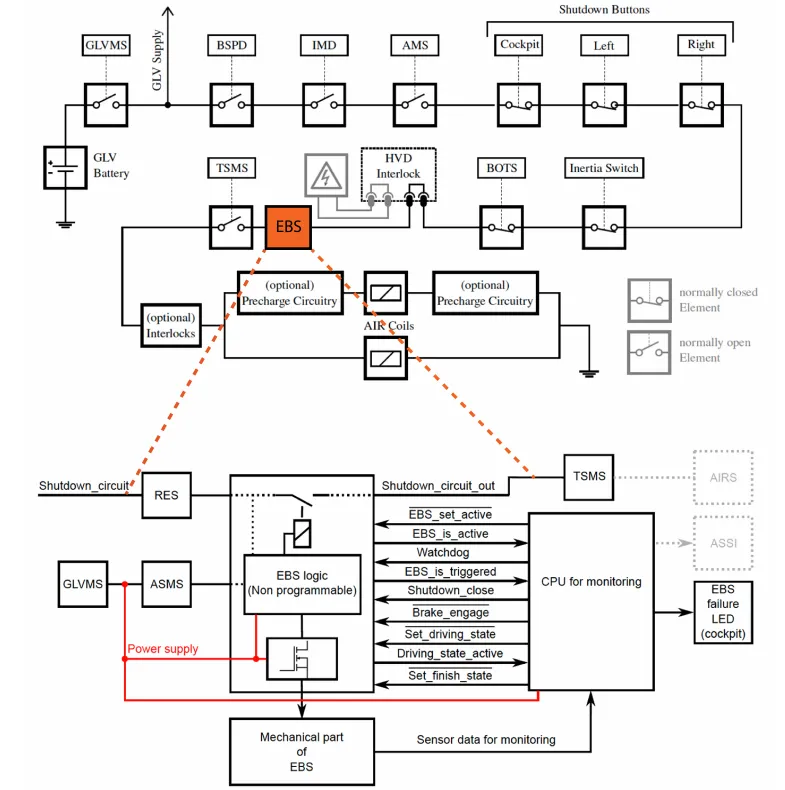
图4.5:上部与下部急停断电回路原理图
6.ASMS自动驾驶总开关:物理船型开关,闭合后自动驾驶电控系统(含EBS监控)上电。
7.Xsens MTi IMU惯性单元:测量车身横摆角速度,为BHC航向控制提供反馈。
8.转向执行电机:永磁直流电机驱动转向柱,BHC闭环执行校正动作;配套电位器采集实际转角。
9.英伟达Jetson TX2:接收激光雷达、摄像头原始数据,SLAM建图+ MPC轨迹规划;软件故障向上位dSpace发送报错信号。
4.1.5 系统工作状态划分(表4.3、图4.6整车状态机)

表4.3:EBS工作状态与整车工况对应关系
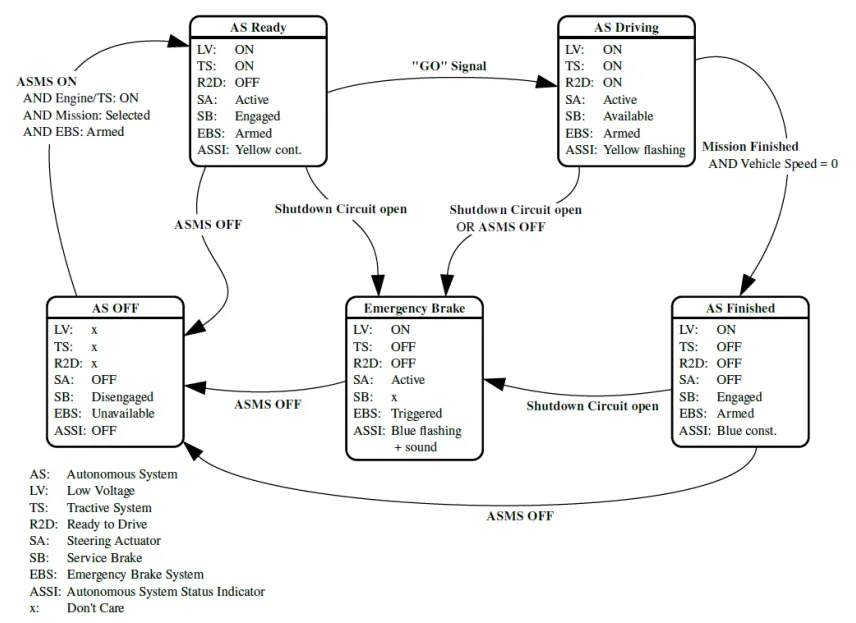
图4.6:自控系统状态机
4.1.6 监控单元五大核心功能描述
①上电初始驻车制动
整车低压总开关+ASMS开关闭合上电,立即驱动伺服制动锁死车轮,规避扭矩误请求带来意外窜车;执行器件:伺服行车制动。

表4.4:初始制动接合所涉及的执行机构
②上电全流程自检
按照文章“上部分”表3.2的自检逻辑排查装配漏装、接线断路故障;涉及输入:ASMS开关、切断回路、制动油压传感器;硬件:dSpace、EBS分立逻辑、气动电磁阀;执行机构:伺服电机。
表4.5:初始自检流程所用传感器与输入信号

表4.6:初始自检流程涉及元器件
表4.7:初始自检流程所用执行机构
③硬件逻辑保活(Keep Alive)
硬件逻辑采用多路与门架构:EBS 监控持续输出多路高电平(EBS_set_active、看门狗、Brake_engage 等)才能保持电磁阀关闭;任意一路信号丢失,与逻辑不满足、电磁阀泄压制动;关联硬件:dSpace、分立逻辑、切断回路、气动电磁阀。

表4.8:保活工况相关零部件
④全周期故障在线监测
持续监测气瓶气压、制动油压、传感器合理性、伺服传递函数、硬件逻辑电平、行驶状态标志;故障触发对应制动动作;监测输入:气瓶压力传感器、制动油压传感器;硬件:dSpace、EBS逻辑、切断回路、电磁阀。
表4.9:工况监测所用传感器与输入信号

表4.10:工况监测相关零部件
⑤故障制动触发
三类故障启用伺服冗余制动:气瓶储气压力过低、气动触发后建压不足、英伟达GPU报错;伺服自身故障则监控停止看门狗脉冲,靠硬件逻辑触发气动制动;关联传感器:气压、油压传感器;硬件:dSpace、EBS电磁阀;执行:伺服制动、仪表指示灯+蜂鸣报警。
表4.11:所用传感器与输入信号

表4.12:EBS触发动作相关零部件
表4.13:所用执行机构/输出负载
⑥制动航向控制BHC
DV3.3.3规则要求紧急制动无意外横摆;依托IMU横摆数据+转向执行器构成P闭环,制动触发后启用、抵消车身偏转;控制闭环原理见图4.7。
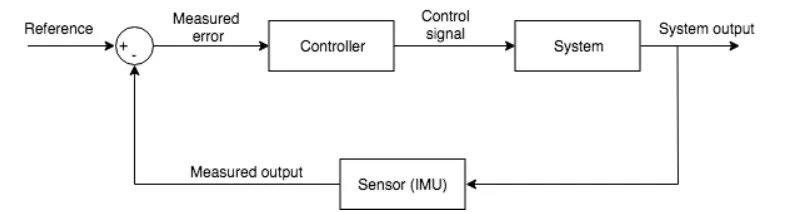
图4.7:闭环反馈控制框图
4.1.7 整车使用环境条件
赛道为封闭铺装沥青路面,比赛时段赛道无无关行人;调试阶段工程师可近距离驻留赛道。

表 4.14 环境温湿度参数
4.2 危害分析与风险评估(HARA)
依托AVL内部标准Excel模板开展HARA分析,工作步骤:HAZOP危险与可操作性分析→危害工况场景梳理→ASIL等级判定→提炼安全目标;完整数据见附录 C~E,正文节选关键内容。
4.2.1 HAZOP 危险与可操作性分析
选用标准引导词:无、误触发、反向、过量、不足、过早、过晚,逐项核查监控单元所有功能(节选“初始伺服抱闸”见表4.15);汇总8项整车危害(表4.16)。

表4.15:HAZOP节选(初始伺服抱闸功能)

表4.16:HAZOP分析危害汇总表(初始行车制动接合功能)
4.2.2 危害场景定义
区别于公共道路乘用车,方程式赛车仅在封闭测试赛道使用,自定义三类运行场景(表4.17),逐个匹配8项危害判定是否产生伤人事故(表4.18):赛道无其他车辆,H2无故驻车、H3突发制动不会引发碰撞;仅静止起步意外窜车、行驶制动失效/横摆/丢转向会撞击赛道边工作人员与裁判。

表4.17:三大运行工况场景

表4.18:危害场景后果分析表

4.2.3 ASIL安全等级判定规则
ASIL分为A/B/C/D四级(A最低、D最高),由严重度S、暴露概率E、可控性C三项参数查表4.22得出等级;S0~S3、E0~E4、C0~C3分级规则如下。
严重度 S(依托 AIS 简明损伤定级)
S0:无任何受伤;S1:轻中度受伤(擦伤、扭伤、简单骨折);S2:重伤、有生命危害但大概率存活;S3:致命重伤/死亡;本项目危害场景仅出现S2、S3两级。

表4.19:严重度分级(S等级,功能安全严重度)
暴露概率E
E0:极罕见工况;E1:极低概率;E2:低概率;E3:中等概率;E4:几乎每次用车都会出现;干地行驶E3、湿地E2、起步待命E4。

表4.20:工况暴露概率分级(E参数,ISO26262暴露等级)
可控性C
C0:极易修正;C1:简易可控;C2:常规可控;C3:极难/无法控制;本车为无人驾驶无驾驶员,全部危害工况统一按C3(不可控)定级。

表4.21:可控性分级(C等级,ISO 26262功能安全可控度)
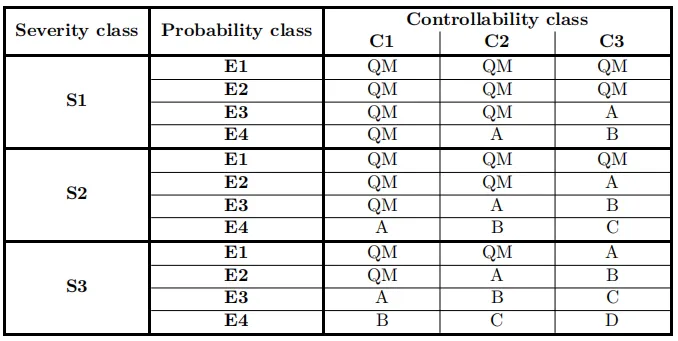
表4.22:ASIL查表判定表(S-严重度/E-暴露/C-可控)
最终定级结果
本项目所有危害对应安全目标统一判定ASIL C级,无D级工况;QM代表无需满足ISO 26262,仅遵循企业常规质量管理。
4.2.4 五大安全目标(SG)汇总(表4.23)

表4.23:安全目标与对应危害、ASIL等级
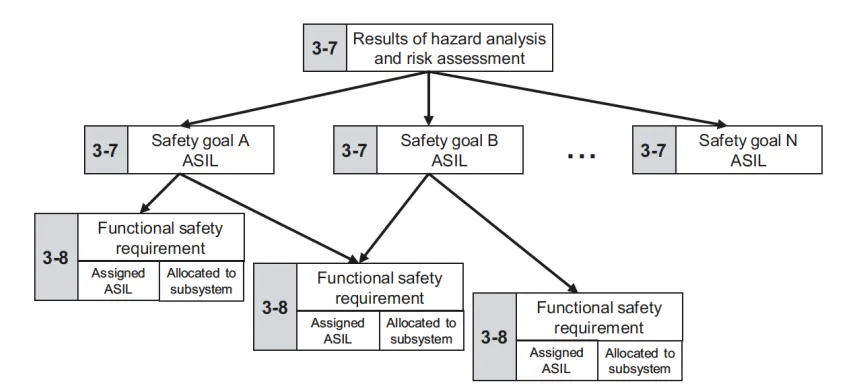
图4.8:安全目标与功能安全要求层级关系图
4.3 功能安全概念(FSC)
基于五大ASIL C安全目标拆解功能安全需求FSR,每项FSR定义运行工况、故障容错时间FTTI、安全状态、冗余设计要求。
4.3.1 SG1:防止意外起步(ASIL C,FSR1)
安全状态:伺服制动锁止车轮;DTI诊断间隔50ms(AVL工程经验),赛事规则限定故障响应FRT≤200ms,FTTI=DTI+FRT=250ms;250ms内1g加速度整车车速低于10km/h,几乎无致死风险。
FSR1:启动工况下,监控单元实时采集驱动扭矩指令与伺服制动状态,异常立即执行安全处置。
4.3.2 SG2:保障制动可用(ASIL C,FSR2、FSR3)
安全状态:冗余制动可靠投入;FTTI同样250ms;FSR2(待命工况):持续在线监测气瓶气压、制动油压、伺服输入指令、伺服实际行程;FSR3(自检工况):自检全流程监测伺服动作、看门狗、切断回路、多路EBS硬件逻辑电平、制动油压、行驶状态标志、自检完成标志。
4.3.3 SG3:保证制动触发(ASIL C,FSR4、FSR5)
安全状态:冗余制动投入,FTTI250ms;FSR4(待命/触发工况):实时监测看门狗、英伟达故障、制动油压、EBS触发反馈信号;FSR5(待命工况):伺服传递函数校验异常时,停止看门狗脉冲、触发气动制动。
4.3.4 SG4:制动无额外横摆(ASIL C,FSR6、FSR7)
安全状态:车身横摆速率低于标定阈值;DTI=50ms,FRT=50ms,FTTI=100ms; FSR6(EBS触发工况):IMU横摆采集与转向输出全链路监控、输出限幅;FSR7(EBS 触发工况):结合实时横摆、车速、转角计算安全转向扭矩指令。
4.3.5 SG5:转向本体功能完好(ASIL C,FSR8、FSR9)
安全状态:BHC航向控制模块关闭;FTTI=100ms;FSR8:仅EBS触发时,BHC算法使能工作;FSR9:整车断电/自检/待命阶段,强制关闭BHC控制。
4.3.6 通用整体需求(FSR10、FSR11)
FSR10(全工况):EBS全系列零部件满足ASIL C设计要求;FSR11(全工况):所有安全关键信号线满足赛事SCS线路规范。

表4.24:全功能安全需求FSR汇总
4.4 技术安全概念TSC
将FSR细化为可落地的硬件软件技术需求TSR,全量TSR,正文仅展示SG1配套TSR与三级监控架构设计。
4.4.1 SG1对应技术需求TSR1、TSR2(ASIL C)
TSR1(启动工况):MicroAutoBox持续采集扭矩请求、伺服制动使能、自检完成三路模拟/数字信号;TSR2(启动工况):自检未完成(EBS_checkup_done=0)且扭矩≠0,立即拉高伺服制动使能、锁止车轮。
4.4.2 通用三级监控设计思路
三级监控架构:一级(功能层):EBS基础算法(自检、BHC、故障监测);二级(功能监控层):校验一级算法输出合理性,异常触发安全动作;三级(主控芯片监控层):独立硬件监控单元、独立电源与晶振,实现MCU内核自检(AD采样校验、程序流校验、ROM/RAM循环巡检、指令集测试、问答式喂狗、过压欠压监测等);三级硬件冗余是满足ASIL C的强制要求,受成本周期限制本项目暂不落地,列为后续优化方向。
4.4.3 硬件架构选型
主控dSpace MicroAutoBox实现一、二级监控;外置独立供电监控板实现三级处理器故障巡检(拓扑图4.9、4.10)。
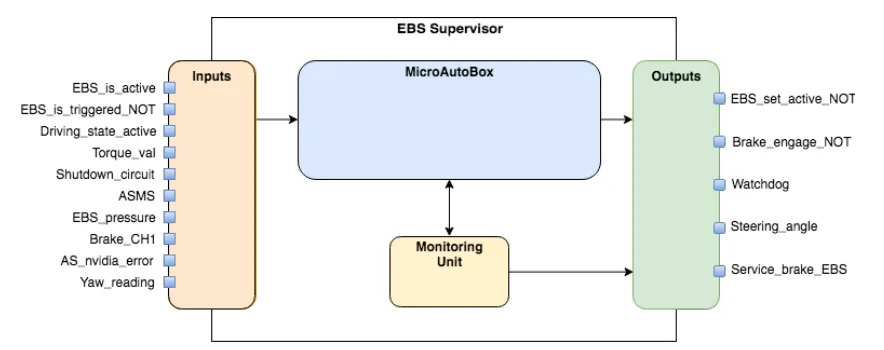
图4.9:带独立监控单元的EBS系统原理图
4.4.4 三级监控完整架构说明(图4.10)
1级:应用功能算法;2级:应用功能结果校验;3级:处理器内核硬件诊断,软硬件完全解耦。
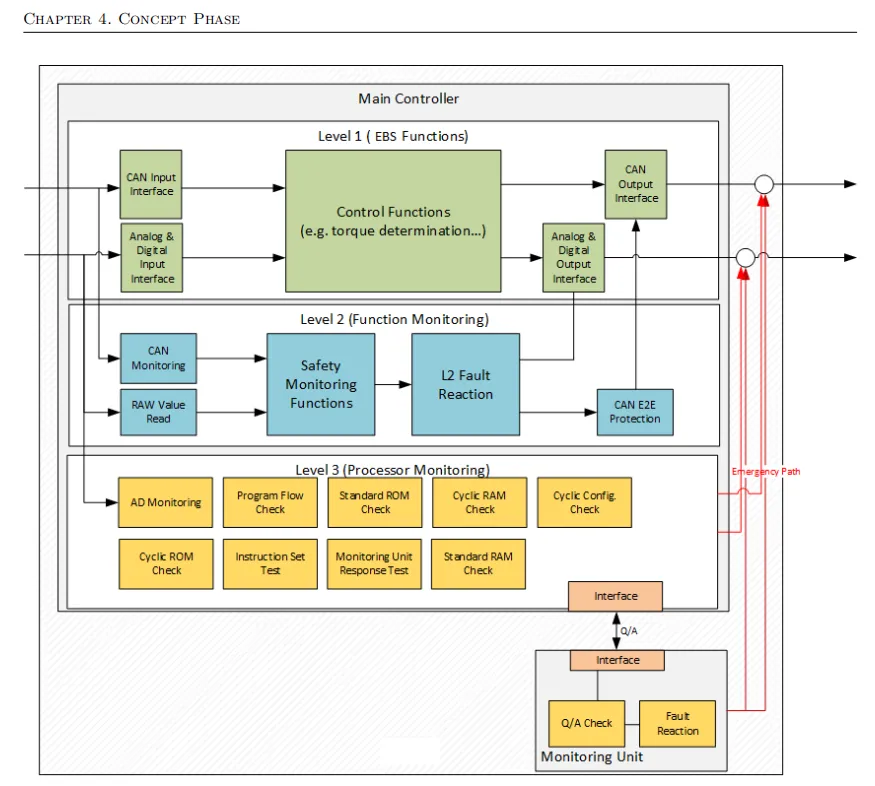
图4.10:三级安全架构方案原理图

05. 分析结果(对应五项研究问题)
5.1 RQ1:KTH车队紧急制动系统该如何设计?
若落地ISO 26262全量ASIL C要求,需要新增冗余CPU、全链路信号校验,受资金、周期约束无法落地;因此整车沿用文章“上部分”第3章初始设计,在满足方程式官方赛事规则前提下即为合理安全方案。
5.2 RQ2:落地功能安全需要哪些管控措施?
核心落地流程即ISO 26262概念阶段四步法:项目定义→HARA→FSC→TSC;
1.项目定义统一全团队对系统边界认知,便于供需双方(主机厂/零部件商)对齐设计;
2.HARA定位失效衍生危害,自上而下制定安全目标;
3.FSC拆解功能需求、TSC落地软硬件细则; 整套流程形成可追溯设计文档,倒逼安全优化;建议安全分析与系统开发由不同人员分组执行,多视角排查隐患。 补充:ISO 26262仅管控硬件/软件失效带来的风险,不评判原始功能方案设计优劣,方案可行性需要前置系统工程评审。
5.3 RQ3:赛事场景EBS潜在故障与风险?
HARA梳理出8类危害,但封闭单赛车赛道下:意外驻车、无征兆制动不会造成人员碰撞,仅意外起步、制动失效、丢转向、制动横摆存在伤人风险;从赛事成绩维度,无故驻车/制动会直接罚分、退赛,因此ISO 26262安全分析也可用来规避赛事失误风险。
5.4 RQ4:现有EBS能否满足ISO 26262?
想要达标ASIL C必须增设冗余处理器、全信号冗余校验、BHC失效容错架构;项目放弃冗余改造,现有设计无法满足ISO 26262完整规范。
5.5 RQ5:ISO 26262是否适合车队研发流程?
优势:提升全员安全设计思维、设计文档在赛事工程评审环节更有说服力;劣势:标准落地周期过长,学生项目资源有限难以全量落地;即便无法全合规,对标标准的分析过程依旧优化了部分监控软件设计逻辑。


06. 讨论与结论
6.1 文档编制
ISO 26262仅规定各阶段文档必备内容,不约束排版与编写工具;本文直接用LaTeX编写分析文档,未使用专业需求管理软件,导致需求追溯繁琐;后续项目建议采用专用需求管理工具优化文档追溯性。
6.2 分析细节粒度
SG安全目标定义粗细无官方强制标准,行业分两种写法:SG宏观定义再细化FSR、SG精细化定义;本文参考AVL工程规范选用宏观SG定义;SG作为顶层安全约束,宏观定义更贴合标准原始意图。
6.3 ASIL等级判定难点
ASIL依托事故统计数据定S/E/C,但无人驾驶赛车无量产事故数据库,只能参考标准示例估算;存疑工况遵循标准“就高不就低”原则,因此本项目统一上浮至ASIL C;同时工况划分过细会人为压低ASIL等级,设计时需要规避该问题。
6.4 ISO 26262适配自动驾驶系统的问题
2011版ISO 26262面向量产民用乘用车,方程式原型赛车不在标准适用范畴,但自定义赛事工况后可顺利完成HARA定级;最大痛点在可控性C定级:原版可控性依托人类驾驶员应急操作,无人驾驶无驾驶员,本文以整车轨迹规划算法的避险能力替代驾驶员可控性;现阶段车队轨迹算法仅沿参考线行驶、无主动避障,因此全部工况C3(不可控);未来优化避障算法后可下调可控等级、降低ASIL。
6.5 QM质量管理等级说明
QM≠无安全需求,代表不受ISO 26262强制条款约束,但必须遵循企业自有质量管控体系;本项目QM场景以满足赛事规则作为质量底线。
6.6 以EBS监控作为分析项的特殊难点
赛事规则已经强制EBS自带基础监控(等同于ISO 26262二级监控功能),因此按照标准需要额外再加一层冗余监控(三级),对标量产车设计属于合理要求,但学生赛事项目成本冗余超标,这是全文分析最突出的矛盾点;但该难点反向加深了团队对分层功能安全架构的理解。
6.7 后续优化研究方向
1.在IPG CarMaker仿真环境标定BHC航向控制参数,完成控制算法验证;
2.新增FMEA失效模式分析、FTA故障树分析深挖潜在隐患;
3.研究SOTIF预期功能安全标准,适配自动驾驶非失效类危害。

免责声明:文中观点仅供分享交流,文章版权及解释权归原作者及发布单位所有,如涉及版权等问题,请您联系alpha.yuan@houwa-tech.com告知,我们会在第一时间做出处理。
相关推荐 ●●




随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 7款SUV降价,四款新车要上市,价格战才刚刚开始 (2)
- 25万级中大型旗舰SUV踩坑指南|唐L DM-i开了90天的真心话
- 又来一款新车,2026款高山7 SUV版加高底盘高度,轻松适应复杂路况
- 续航破纪录、AI会聊天!6款重磅SUV即将杀到
- 15万级家用SUV新标杆,余承东官宣尚界H5焕新登场
- 30万落地的美式豪华SUV!这台林肯让我重新认识了“二线豪华”
- 卖得最火的SUV到底赢在哪
- 小米昆仑增程SUV 3个信号刺痛理想
- 不到10万拿下合资SUV尺寸的国产车?这台冷门SUV我得说句良心话
- MPV+SUV二合一!高山7 SUV版来了,限时27.08万,家庭出行新物种
