从ToF测距到6D全彩感知,一台不会拍照的“3D相机”如何重新定义机器视觉
一、先搞清楚:激光雷达到底在“看”什么?
如果说摄像头是在“看颜色”,那么激光雷达(LiDAR)是在“测距离”。在自动驾驶、机器人、无人机、测绘等领域,激光雷达被誉为机器的“第三只眼”。它最大的特点是:不依赖环境光,能够直接获取三维空间信息。
LiDAR全称 Light Detection And Ranging(激光探测与测距),本质上是一种利用激光测量距离的传感器。
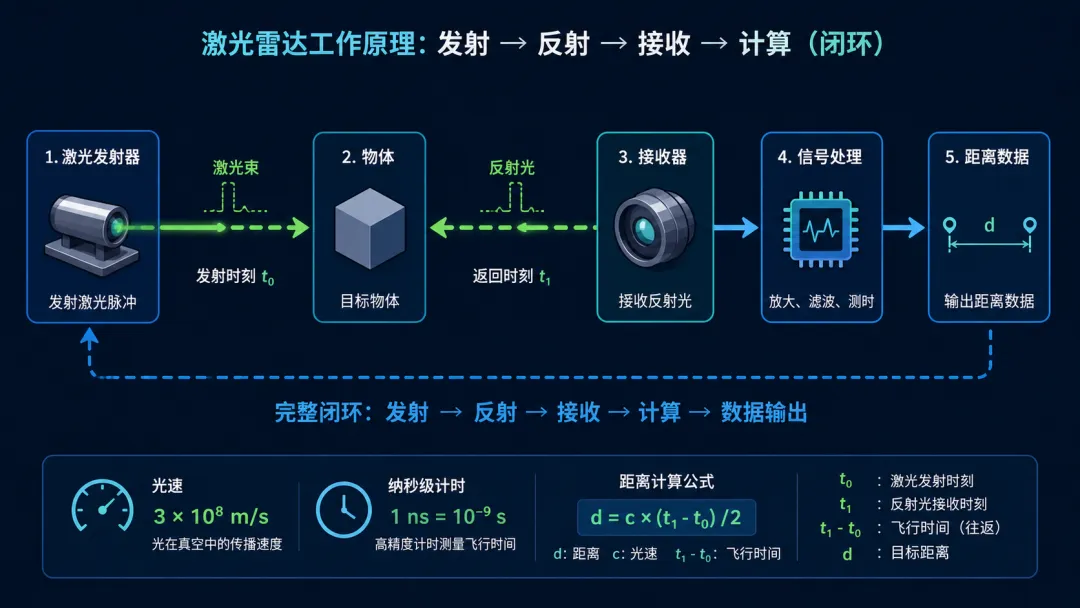
工作逻辑非常简单:
发射激光 → 击中物体 → 反射回来 → 测量飞行时间 → 计算距离
就像蝙蝠发出超声波定位一样——区别只是蝙蝠用声音,激光雷达用光。二、核心结构拆解:一个小盒子里藏着什么?
从外部看,一个激光雷达可能只是一个小盒子。但内部结构相当复杂:1. 激光发射器:系统的“光源”
发出极短的激光脉冲,常见波长为 905nm 和 1550nm(看不见,属于红外光)。2. 扫描系统:从一条线到整个世界
激光只有一条线,要看到整个世界就必须不断扫描。目前有三种主流技术路线:2026年的关键转折:固态SPAD-SoC芯片化架构成为行业分水岭。禾赛科技发布“毕加索”SPAD-SoC芯片,速腾聚创推出“凤凰”芯片,均实现2160线以上的超高分辨率,成本却降至200-500美元区间。
3. 接收器:捕获极其微弱的反射光
- APD(雪崩光电二极管):光→电子→放大→输出信号
- SPAD(单光子雪崩二极管):甚至能检测单个光子,目前高端激光雷达大量采用
三、最核心原理:飞行时间测距(ToF)
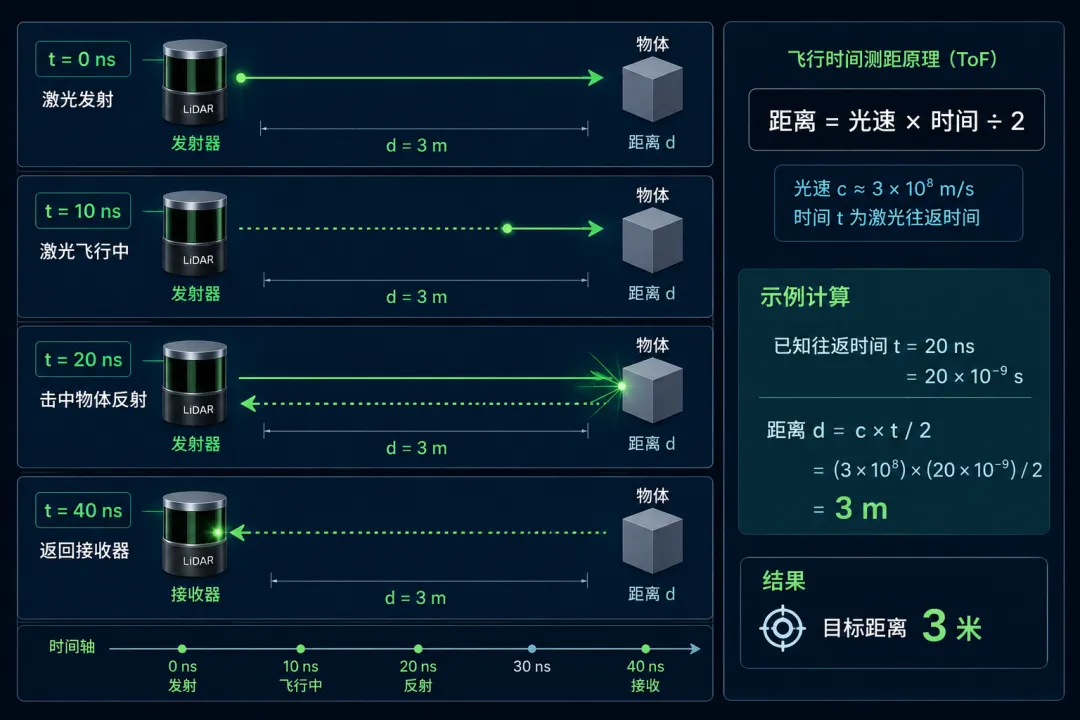
激光雷达最重要的原理是 Time of Flight(飞行时间法):发射激光 → 飞向目标 → 反射回来 → 记录时间
由于光速已知(≈ 300,000 km/s),因此:为什么除以2? 因为激光走了一个来回(雷达→目标→雷达),总路程是两倍。举个例子:假设飞行时间 20 ns(20×10⁻⁹秒)
距离 = 3×10⁸ × 20×10⁻⁹ ÷ 2 ≈ 3米
只需测量纳秒级时间,就能知道目标距离。这就是激光雷达的“超能力”——时间分辨率直接转化为空间分辨率。四、激光雷达如何成像?它不拍照,它“画点”
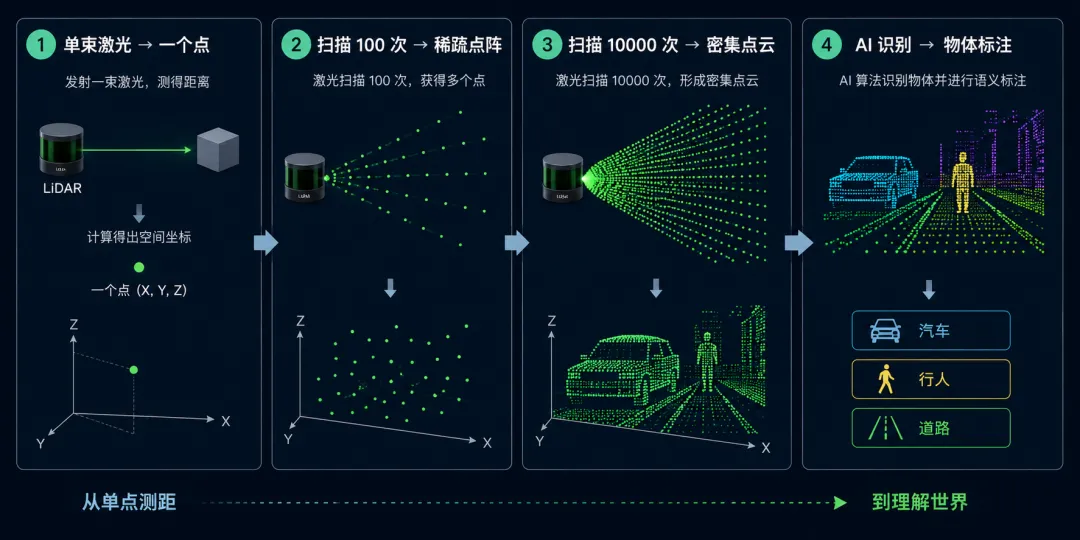
激光雷达并不拍照片。它生成的是:点云(Point Cloud)想象一下:激光不断扫描,每发射一次获得一个坐标点 (X, Y, Z)。例如 (2.1m, 1.4m, 0.7m) 表示空间中的一个点。扫描百万次后,形成密密麻麻的空间坐标——这就是点云数据。
坐标计算: - 距离 r - 水平角 θ - 垂直角 φ
转换成 X, Y, Z 坐标,最终形成三维地图。
在计算机里看到的不是照片,而是由无数空间点组成。
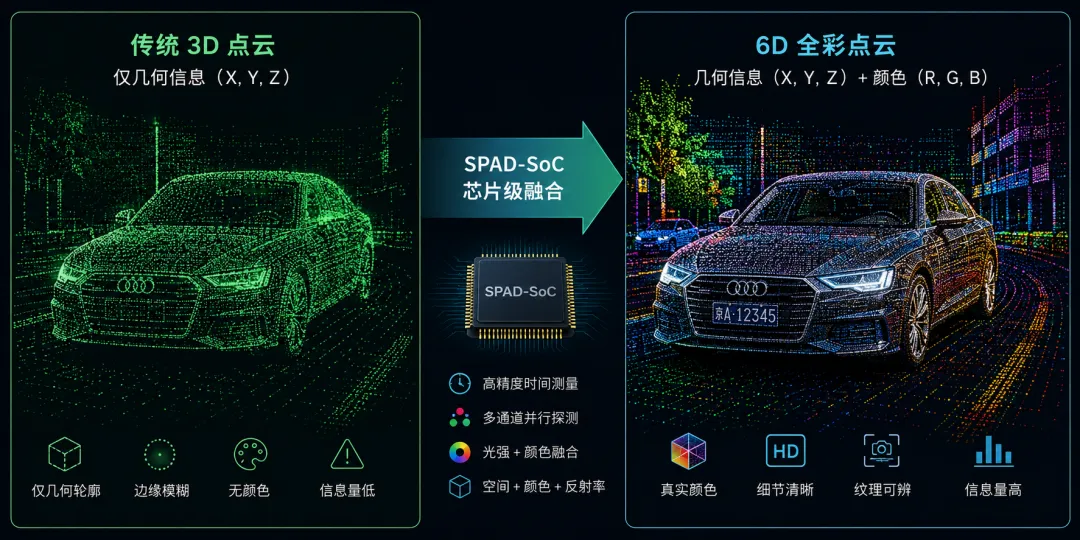
五、2026年革命:从3D到6D全彩感知
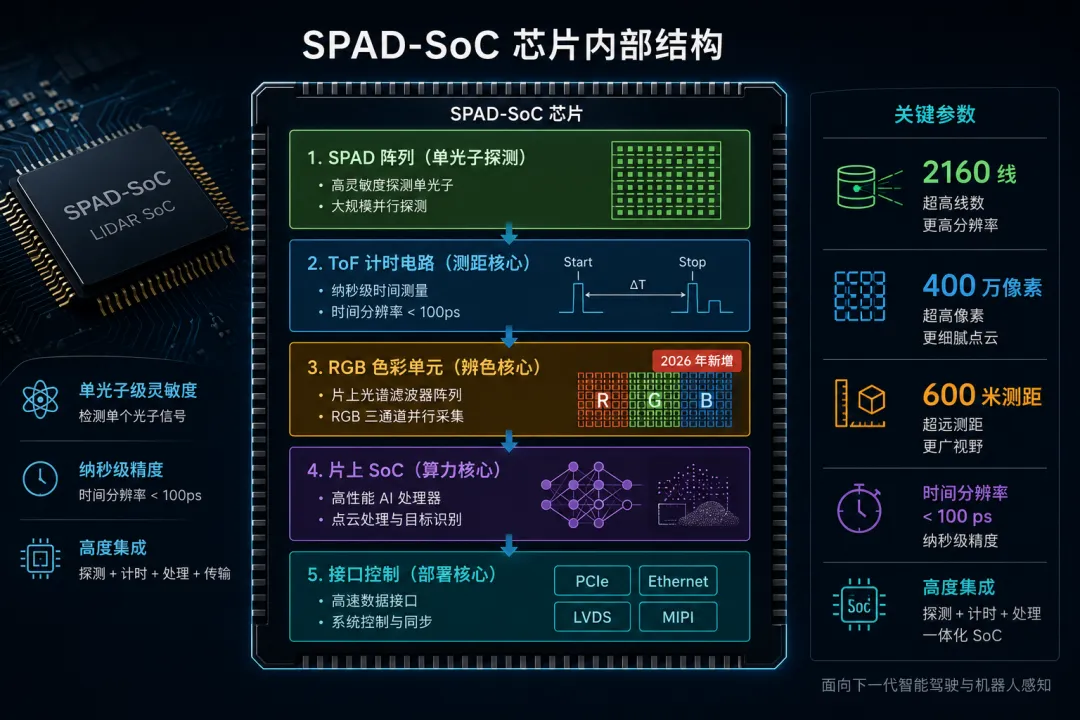
2026年,激光雷达行业发生了质的飞跃——6D全彩激光雷达的出现。传统激光雷达只感知三维空间(XYZ),存在两个本质问题: 1. 看得见几何,看不懂语义——不知道点云中的物体是什么颜色 2. 需要后期与摄像头拼接——激光雷达和摄像头数据时间对齐困难,融合误差大2026年,禾赛科技发布“毕加索”SPAD-SoC芯片,速腾聚创推出“凤凰”SPAD-SoC芯片,通过芯片级像素级融合,把RGB颜色信息直接“揉”进点云里——每一个点都自带颜色数据。SPAD-SoC芯片五大核心模块: 1. SPAD单光子探测器阵列——接收端核心,检测单个光子 2. ToF计时电路——测距核心,纳秒级精度 3. RGB色彩处理单元——辨色核心,2026年最大突破点 4. 片上SoC处理单元——算力核心,实时处理 5. 接口与控制单元——部署核心,即插即用
技术优势: - 像素级时空对齐,彻底消除后期拼接问题 - 400万级超高像素分辨率 - 10%反射率下测距 400-600米 - 能在 300米外识别水马、280米外识别小动物
六、激光雷达如何识别汽车和行人?
激光雷达只负责获得点云,它本身并不知道“汽车”“行人”“红绿灯”是什么。后续流程:
点云 → AI算法 → 目标检测 → 目标分类 → 轨迹预测
例如:5000个点组成一个物体,AI判断其高度、宽度、形状、运动轨迹,符合汽车特征,于是识别为 🚗 车辆。6D全彩的加持:当每个点自带RGB颜色信息后,AI的语义理解能力大幅提升——不仅能识别”这是一个物体”,还能识别”这是一个红色的停车标志”或”这是一个蓝色的垃圾桶”。
七、为什么自动驾驶离不开激光雷达?
| 场景 | 摄像头 | 激光雷达 |
夜晚 | 几乎看不清 | 照样测距 |
逆光 | 容易过曝 | 影响较小 |
强光/阴影 | 对比度失效 | 稳定工作 |
距离精度 | 依赖算法估算 | 直接测量 |
三维结构 | 需立体视觉推算 | 原生输出 |
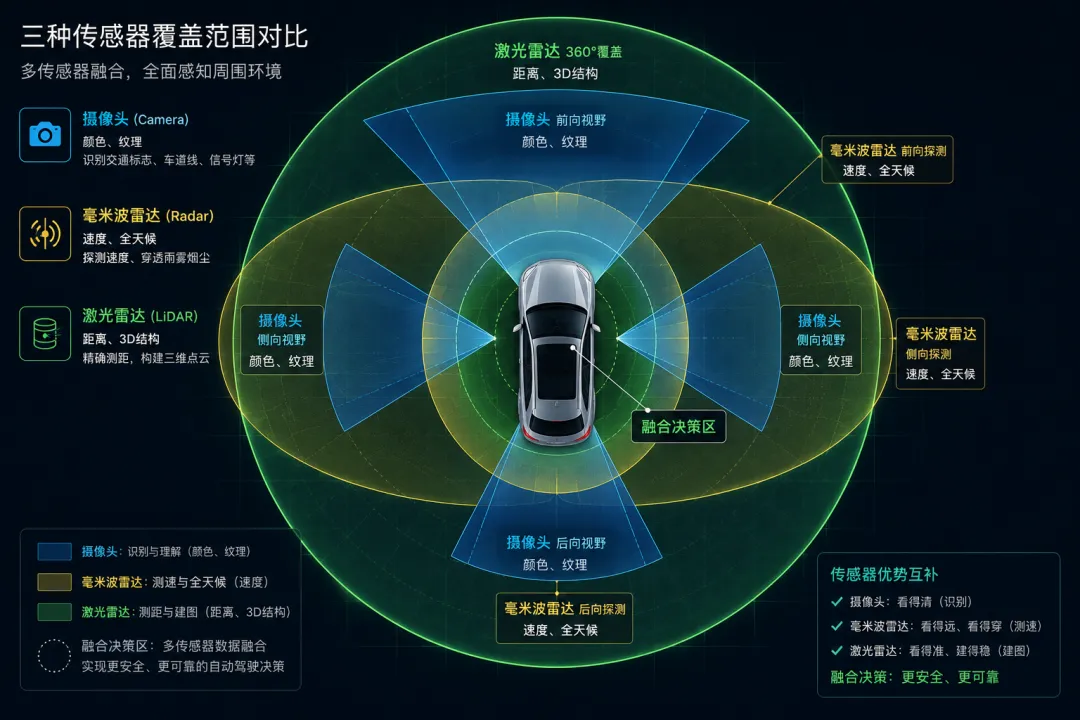
因此,自动驾驶普遍采用多传感器融合: 摄像头:颜色、纹理、语义 、 毫米波雷达:速度、全天候、远距离 激光雷达:真实距离、真实空间位置、三维结构
八、数据洪流:一台激光雷达每秒产生多少数据?
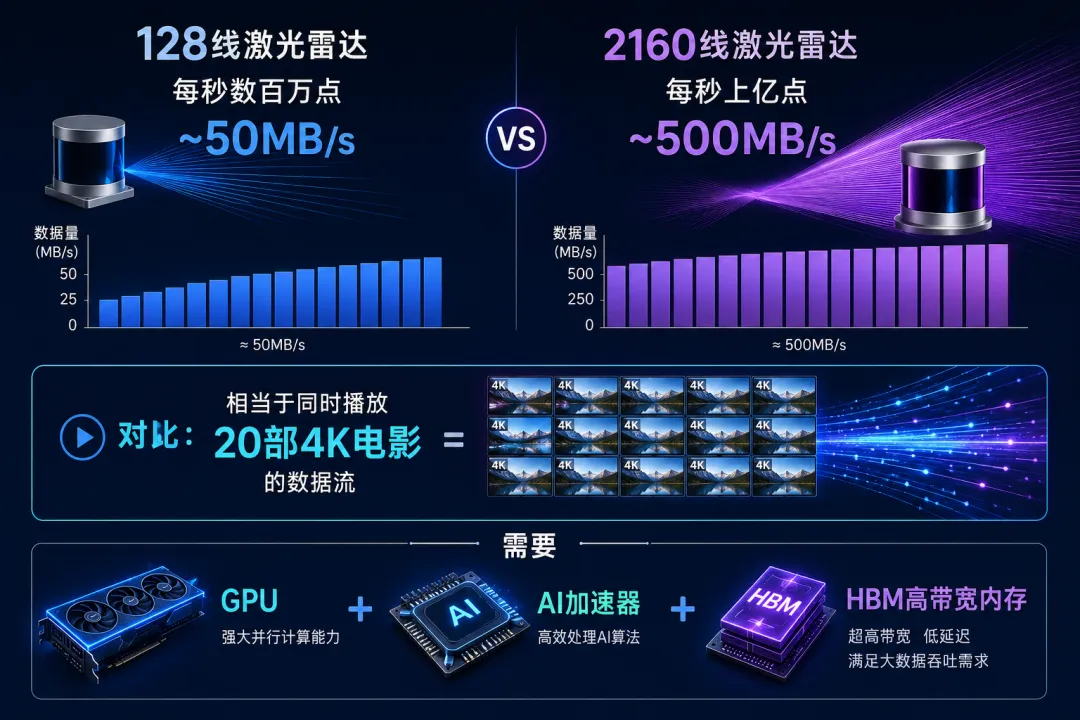
以 128线激光雷达 为例: - 每秒:数百万个点 - 数据量:数十MB高端产品甚至每秒上亿点。因此自动驾驶芯片需要: - GPU - AI加速器 - 高带宽内存(HBM)
实时处理海量点云,是自动驾驶系统的“算力刚需”。
2026年三大竞争赛道
- L2++极限演进:端到端大模型把辅助驾驶做到“几乎不用接管”
- L4 Robotaxi规模扩张:谷歌Waymo目标2026年底周100万次订单
- 物理AI数据竞赛:人形机器人量产战打响,激光雷达企业的”第二曲线”打开
总结:激光雷达到底是什么?
可以把激光雷达理解成:一台不会拍照的“3D相机”。它不记录颜色,而是不断发射激光,测量距离,并把整个世界转换成由数百万个坐标点组成的三维地图。核心过程只有四步:
激光发射 → 反射返回 → 测量飞行时间 → 生成点云
最终:点云 → AI识别 → 环境理解 → 自动驾驶决策从某种意义上说,激光雷达看到的世界,比人眼看到的更“数字化”。因为在人眼看到的是图像,而在机器眼里,整个世界只是由无数个精确的三维坐标点构成。而2026年的6D全彩激光雷达,正在让机器不仅能“测距离”,还能“辨颜色”——从冰冷的坐标点,走向有语义的彩色世界。
参考资料: - 禾赛科技2026技术开放日:“毕加索”SPAD-SoC芯片与ETX 4320线激光雷达 - 速腾聚创2026 Tech Day:“凤凰”芯片与”创世”数字化架构 - InsightAce Analytic《LiDAR Market Latest Trends Analysis Report 2026》 - Business Research Insights《Solid-State LiDAR Market Forecast Report 2026》