首先看看官方链接:
https://www.miit.gov.cn/zwgk/wjgs/art/2026/art_87a73a22fd22496c9b62238651ed98e4.html
有消息说L3必须摄像头+毫米波雷达,L4必须摄像头+毫米波雷达+激光雷达。甚至还声称文件划定硬件红线:L3车型必须做到摄像头与毫米波雷达双感知冗余,单一纯视觉方案不能申报国内合规L3自动驾驶;L4车型还需要加装激光雷达。
那么真的是这样么?
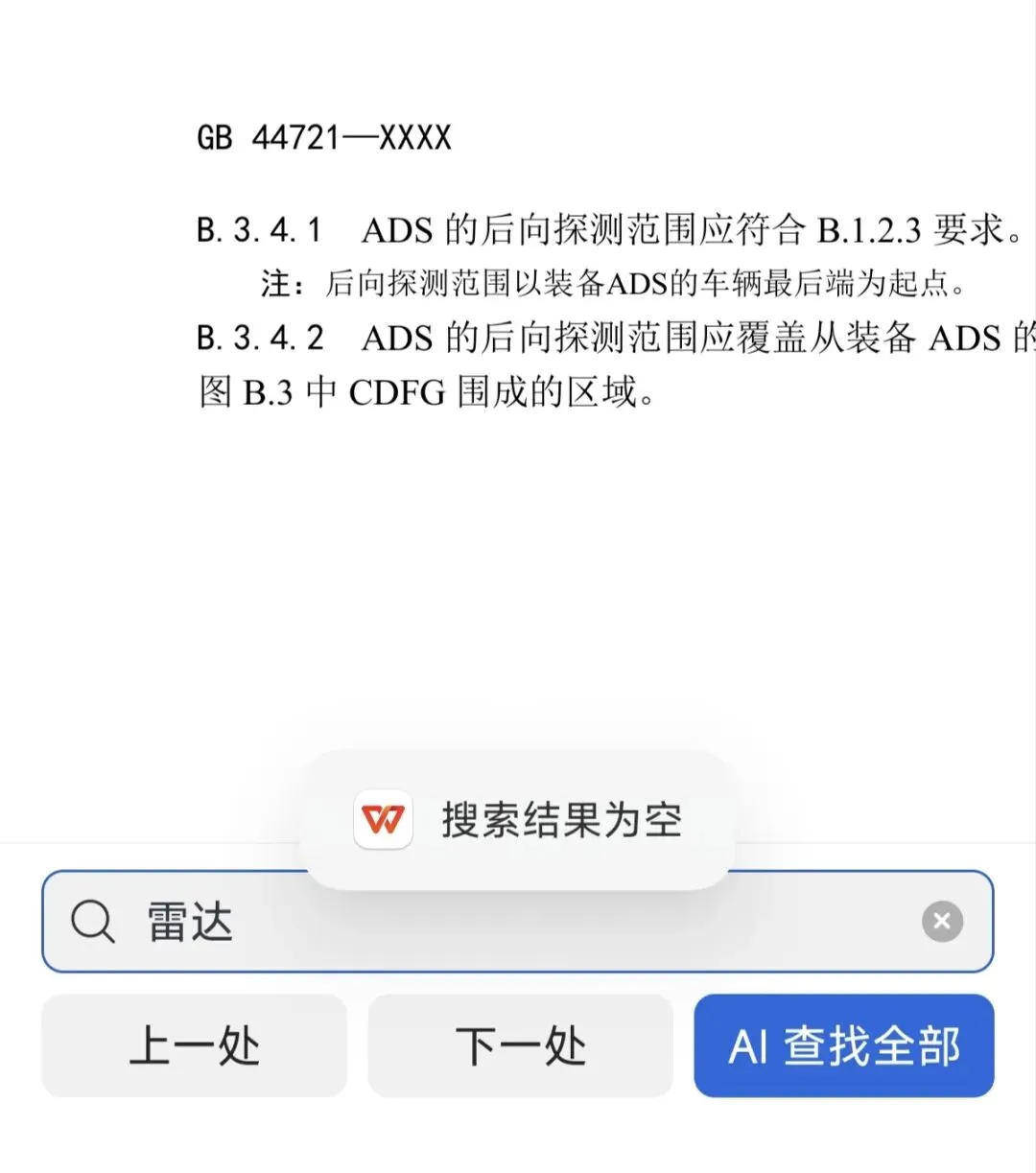
我们打开官方链接,下载报批稿,看看里面到底是怎么写的。我们搜索“雷达”,显示结果为空。
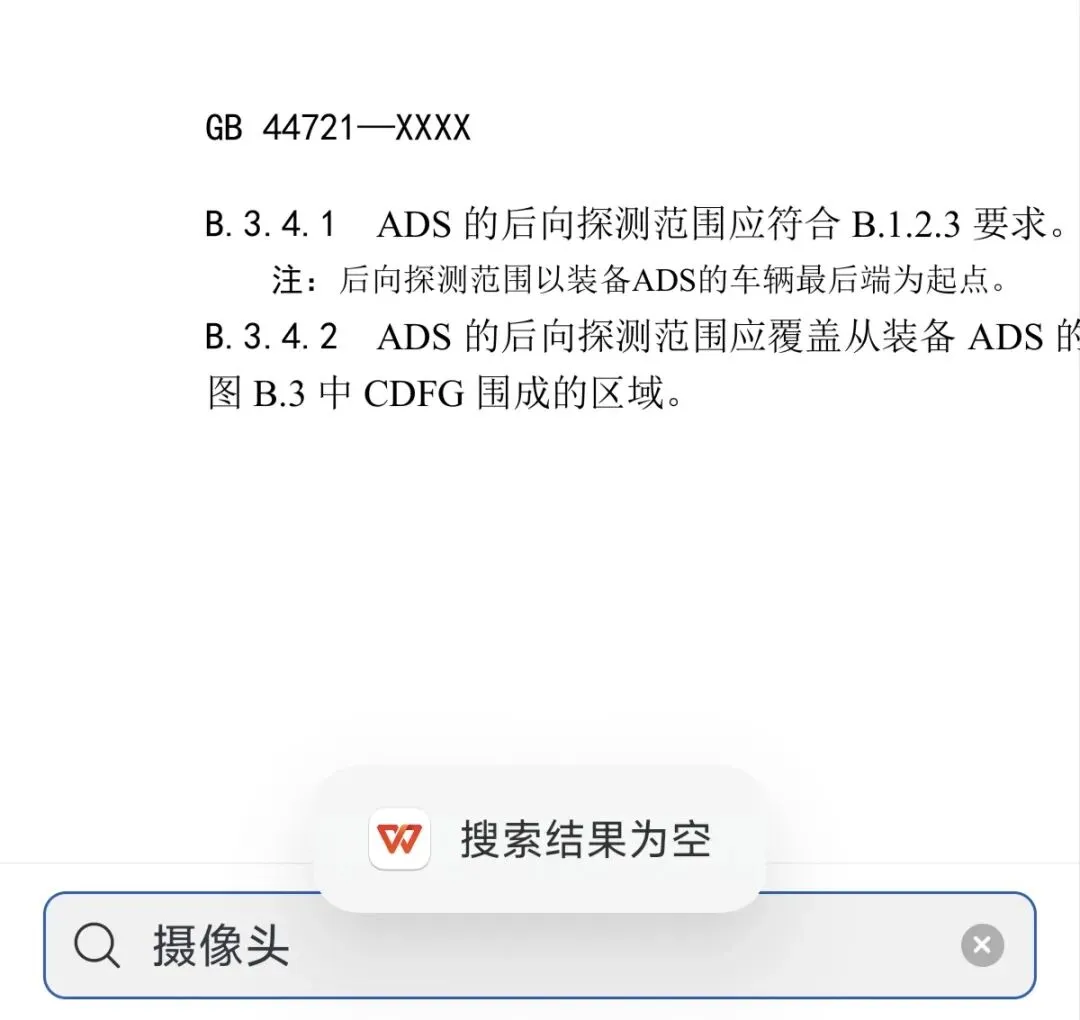
搜索“摄像头”,显示结果也为空。
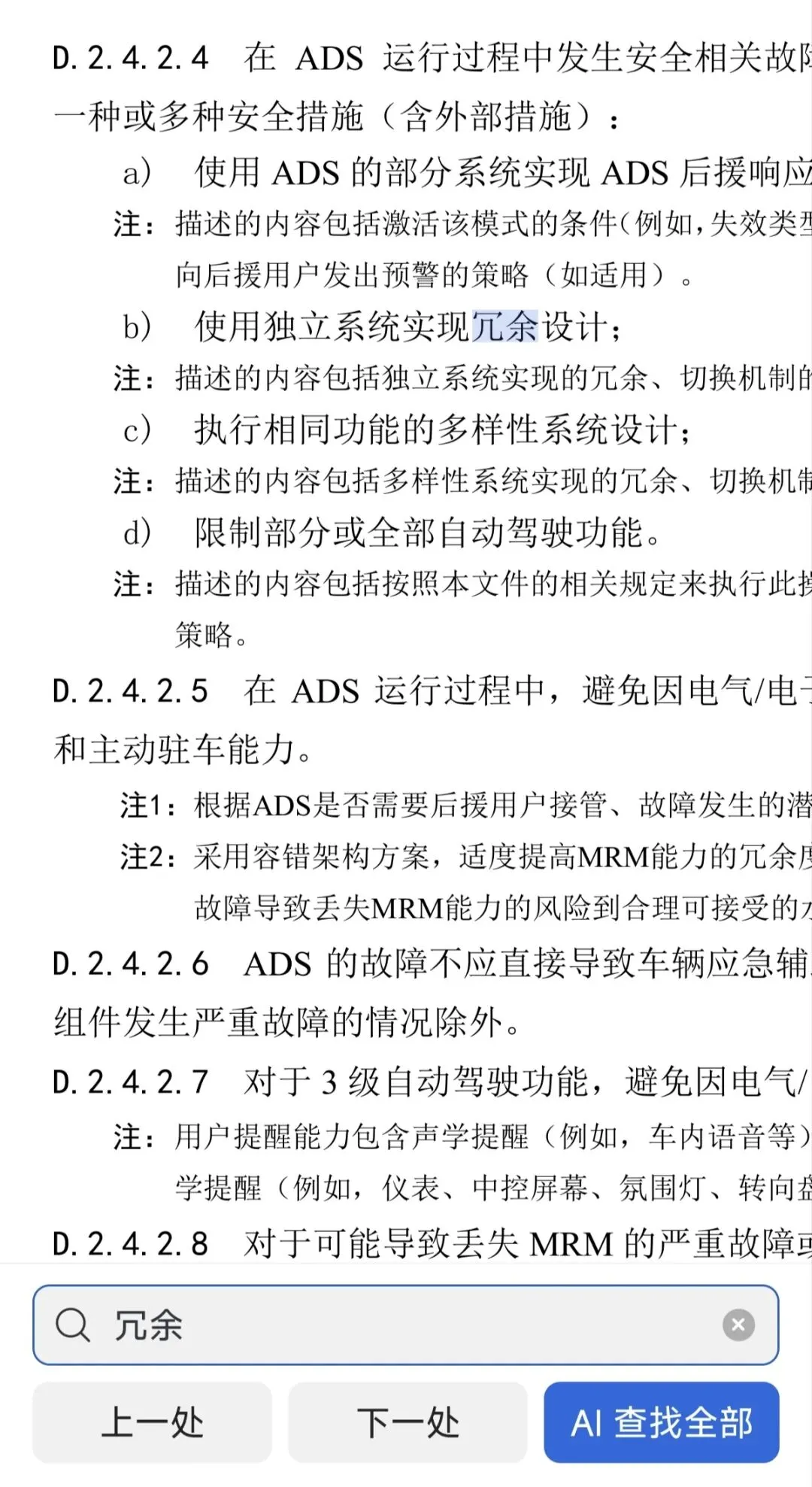
那么该文件中对于“冗余”是否有相关词汇呢?那还是有很多的,但并没有提到“感知冗余”。
那么对于“感知”这个词呢?
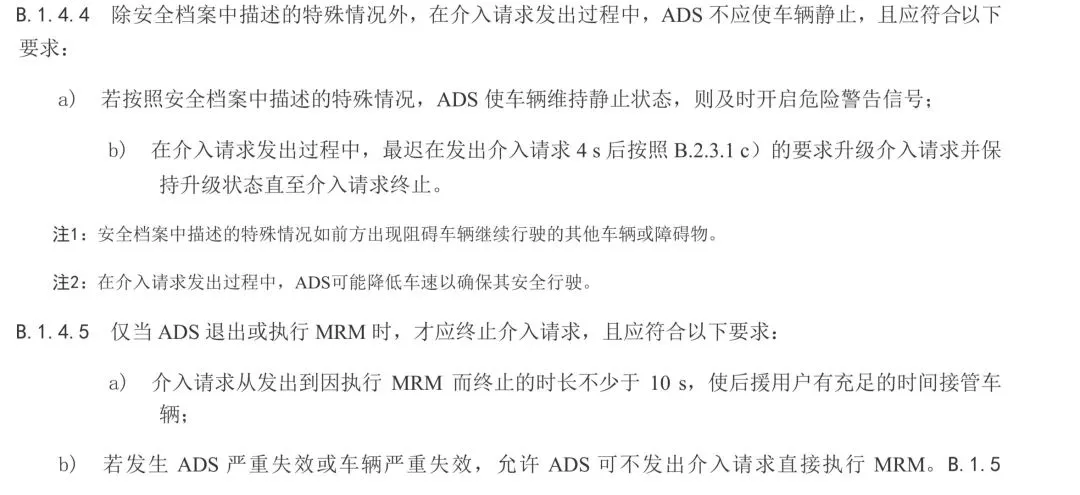
提到了“若发出介入请求, 确保预留充分时间,以便后援用户感知到介入请求并安全接管 DDT 。”这一点很重要,我们已经看到很多在请求用户介入后没几秒钟就发生事故甚至是用户还没介入自动驾驶就直接退出的情况,根本不给用户反应时间。那么标准中有没有提到预留的充分时间是多久呢。“仅当 ADS 退出或执行 MRM 时, 才应终止介入请求,且应符合以下要求:a) 介入请求从发出到因执行 MRM 而终止的时长不少于 10 s, 使后援用户有充足的时间接管车辆;b) 若发生 ADS 严重失效或车辆严重失效, 允许 ADS 可不发出介入请求直接执行 MRM 。”这条规定直接封死了“事故前系统突然撂挑子”的漏洞。以前的事故中,常见致命场景是:系统在碰撞前1~3秒突然退出,把完全没准备的方向盘和刹车瞬间扔给驾驶员,导致人为反应根本来不及。
针对这一乱象,新规的作用是强制系统必须“扛到最后”,具体通过三重机制实现:
· 堵死“误触即退出”的漏洞(针对核心前提):以前系统常因驾驶员慌乱中猛打方向或重踩刹车,就被误判为“人工接管”而立即退出,导致AEB(自动紧急制动)等主动安全功能失效。新规严格规定介入请求只能因“计划内退出”或“执行MRM”终止——也就是说,只要没到预定的安全停车节点,驾驶员的操作信号无法强制系统立刻撒手,系统必须继续参与风险控制直至进入安全状态。
· 禁止“零预警仓促退出”:新规要求从发预警到系统退出(执行MRM)不少于10秒。这意味着,如果系统在碰撞前几秒内因“感知到危险”想退出推给驾驶员,必须提前10秒就报警。如果在碰撞前2秒才退出,直接违反该条款,属于违规设计。这彻底杜绝了“临时甩锅”的猝死式退出。
· 故障时“跳级保命”而非“关停甩锅”(针对b款):若系统发生严重失效,旧逻辑可能是直接“宕机退出”。新规强制:允许但不允许直接退出,而是允许跳过人工请求,直接执行MRM(如紧急制动减速)。这就把“退出”变成了“主动避险动作”,确保在最危险的最后几秒,系统即使崩溃也要执行减速,而不是瞬间切断所有控制力。
以前是“不行了就退,交给人(虽然人根本来不及)”;现在是“退之前必须给足10秒,如果来不及退,那就必须自己努力刹停”——把底线从“提醒义务”升级为“安全兜底义务”,彻底禁止在事故窗口期无保护地终止控制。很明显,对于L3和L4自动驾驶,还有一段时间要走。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
