导语:当无人驾驶出租车真正驶上城市道路,乘客最关心的问题可能不再只是“它能不能自己开”,而是坐在车里的人,能不能相信它?会不会晕车?能不能看懂它接下来要做什么?很多自动驾驶车辆都会在车内屏幕上显示感知环境、周围车辆、道路元素和未来行驶轨迹。看起来,这样的界面似乎能够让乘客更理解车辆行为,从而提升信任、降低不安。但问题是:这些信息真的有用吗?这篇发表在《Applied Ergonomics》的最新研究,把实验从模拟器和“伪自动驾驶”环境中带到了真实商业运营的无人驾驶出租车中。
研究背景:
随着 L4 级自动驾驶技术逐渐进入商业运营,无人驾驶出租车已经在部分城市开始运行。对乘客而言,自动驾驶的普及不仅取决于技术是否成熟,也取决于他们是否信任车辆、是否能够在乘坐过程中保持舒适。
过去大量研究认为,车内 HMI 可以通过展示车辆意图、道路信息和潜在风险,提高系统透明度和用户信任。同时,车辆未来动作的提前提示,也可能帮助乘客预判加速、减速和转弯,从而缓解晕车。但这些研究大多基于模拟器或 Wizard of Oz 实验,缺少真实道路风险和真实车辆动态,因此结论是否适用于真实无人驾驶出行场景仍然存疑。
研究目的:
本研究希望验证:
在真实商业运营的无人驾驶出租车中,显示车辆的实时动态轨迹规划信息,是否能够提升乘客对自动驾驶系统的信任、系统透明性感知,并降低乘客在观看车内视频时产生的晕车症状。
研究过程:
研究招募了 16 名没有乘坐过无人驾驶车辆的参与者,每人完成两次真实无人驾驶出租车乘坐实验。
一次实验中,参与者可以看到车内屏幕上的动态轨迹规划信息;另一次实验中,研究者用定制遮挡板遮住该信息。两次实验顺序进行平衡处理,以减少学习效应。
乘坐过程中,参与者需要观看车内屏幕播放的纪录片视频,以模拟未来自动驾驶场景中乘客进行娱乐、办公或其他非驾驶任务的状态。同时,研究团队通过问卷、每分钟口头报告和车辆运动数据记录,综合测量乘客的信任感、系统透明性感知和晕车程度。
研究结果:
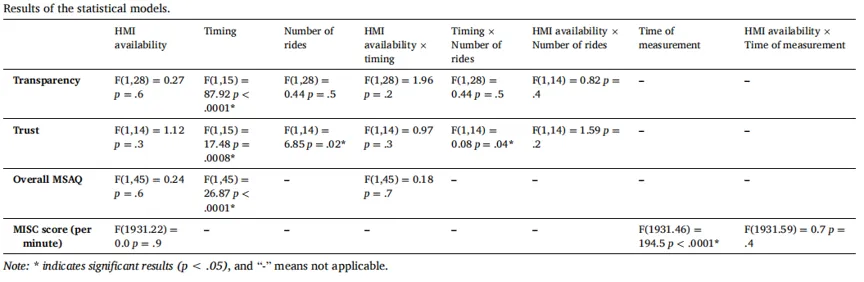
研究发现,单纯显示动态轨迹规划信息,并没有显著提升乘客对无人驾驶车的信任,也没有显著提升系统透明性感知。
在晕车方面,显示轨迹信息时,部分晕车指标的上升幅度确实更小,但整体统计结果并不显著。这说明轨迹可视化可能具有一定缓解晕车的潜力,但作用有限。
更重要的是,研究发现第一次真实乘坐体验对信任提升最关键。乘客在完成第一次无人驾驶乘坐后,信任水平明显提高;但第二次乘坐带来的额外提升并不明显。
PART01 研究介绍
在很多智能座舱和无人驾驶概念设计中,设计师往往会默认一个前提:只要把车辆感知到的信息展示出来,用户就会更安心。
于是,车内屏幕上出现了大量自动驾驶相关信息:周围车辆、行人、车道线、交通灯、障碍物、未来轨迹、路线规划……这些界面看上去非常“科技”,也似乎能让乘客感到车辆正在认真观察环境、谨慎做出判断。
但这篇研究提出了一个很现实的问题:信息展示本身,真的等于信任建立吗?
对于自动驾驶乘客来说,他们并不只是想知道车辆“接下来往哪走”,更想知道车辆“为什么这样走”“它是否看到了风险”“它接下来的动作会不会突然”。如果 HMI 只是把系统内部的一部分数据可视化出来,却没有真正转化为乘客能够理解和预判的信息,那么它对信任和舒适性的帮助可能远低于设计师预期。
这也是本研究最有价值的地方。它没有停留在概念演示或模拟器实验,而是把问题放进真实商业运营的无人驾驶出租车中,直接检验动态轨迹信息在真实道路中的实际效果。
PART02 研究内容
为了验证动态轨迹 HMI 是否有效,研究团队设计了一项真实道路实验。
1. 真实无人驾驶出租车实验
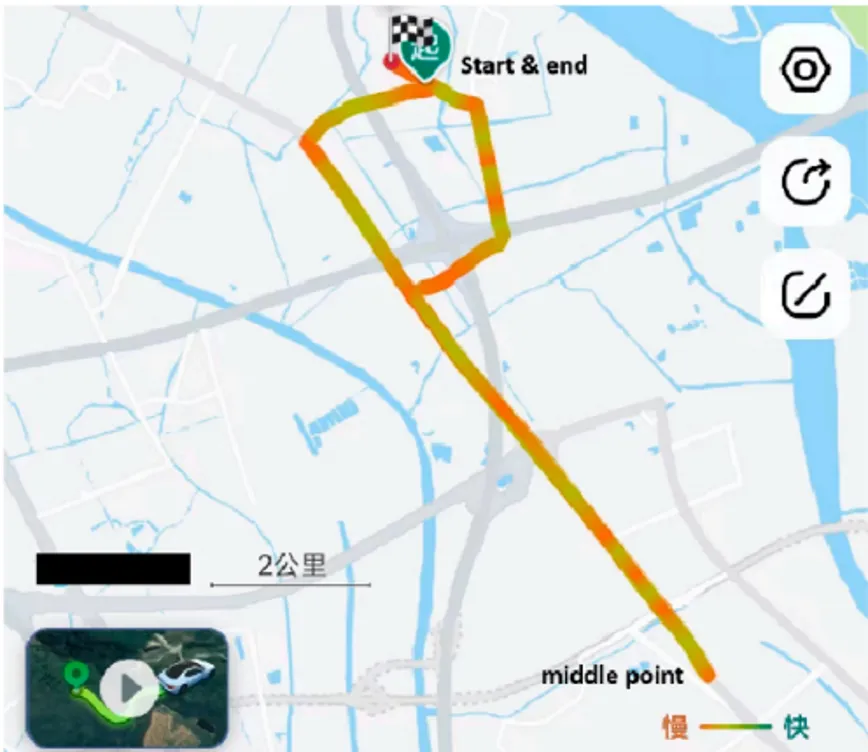
实验路线为一条约 15 公里的闭环路线,从香港科技大学(广州)校园出发,经过黄阁汽车城,最后回到起点。路线包含城市道路中常见的加速、减速、跟车、红绿灯、变道和超车等交通情境,能够较真实地反映无人驾驶出租车的日常运行状态。
参与者均坐在第二排右侧座位。每名参与者需要完成两次乘坐,一次能够看到动态轨迹规划信息,另一次看不到该信息。两次实验之间至少间隔 3 天,以减少晕车后的残留影响。
图1:实验采用真实城市道路闭环路线,包含加减速、变道、红绿灯等典型交通情境
2. HMI 条件对比:看得见轨迹 vs 看不见轨迹
实验中的核心变量是:乘客是否能够看到车内屏幕上的动态轨迹规划信息。
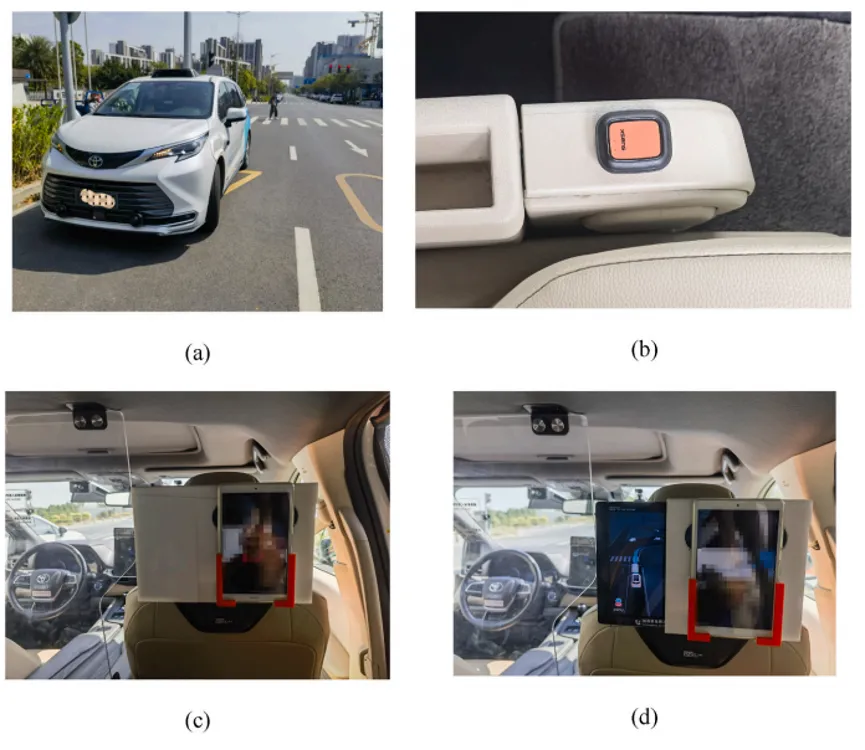
在“有 HMI”条件下,乘客可以看到车辆计划行驶的轨迹、感知到的道路元素和周围交通参与者;在“无 HMI”条件下,研究者使用定制遮挡板遮住相关信息,使乘客无法看到车辆未来轨迹。
这种设计非常接近真实产品问题:很多无人驾驶出租车已经开始向乘客展示车辆感知和规划信息,但这些信息是否真的能产生用户体验收益,仍需要被实证验证。
图2:实验车辆、车载 IMU 设备及 HMI 显示/遮挡条件
3. 模拟未来乘客的真实使用状态
在自动驾驶场景中,乘客不再需要持续观察道路,可能会看视频、工作、阅读或使用手机。因此,研究团队要求参与者在乘车过程中观看车内屏幕播放的纪录片视频,并在实验后回答相关问题,以确保他们真的投入到非驾驶任务中。
这一步很关键。因为晕车往往不是在“专心看路”时最严重,而是在乘客低头看屏幕、阅读或看视频时更容易发生。研究通过视频任务,让实验更接近未来自动驾驶座舱中的真实使用情境。
4. 多维度测量信任与晕车
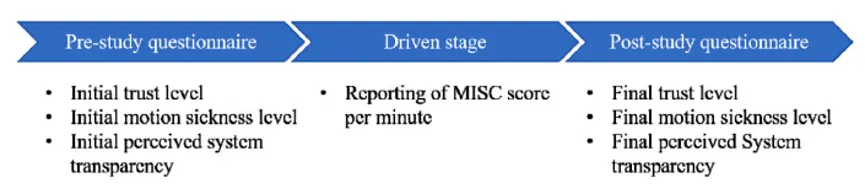
研究团队从三个方面采集数据:
第一,乘车前后填写信任问卷,用来测量乘客是否更相信无人驾驶系统。
第二,乘车前后填写系统透明性感知问卷,用来判断乘客是否觉得自己更能理解和预测车辆行为。
第三,使用 MSAQ 和 MISC 两种晕车评估方式。MSAQ 在乘车前后填写,MISC 则要求参与者在乘车过程中每分钟报告一次当前不适程度。
此外,研究者还通过 IMU 记录车辆运动数据,并计算运动刺激强度,以确保不同实验条件下的道路运动刺激没有明显差异。
图3:不同参与者的实验条件顺序与视频内容安排
PART03 结果分析
1. 轨迹可视化并没有显著提升信任
研究最直接的发现是:显示动态轨迹规划信息,并没有显著提升乘客对无人驾驶车的信任。
这与许多模拟器研究的结论并不完全一致。过去研究常认为,展示车辆意图和未来轨迹可以提升系统透明度,从而增强信任。但在真实无人驾驶出租车中,这种效果并不明显。
原因可能有两个。
一方面,本研究中的参与者以年轻人为主,他们对自动驾驶等新技术的理解和接受度较高,初始信任水平本身不低,因此 HMI 留给信任提升的空间有限。
另一方面,实验中的无人驾驶车辆整体运行较平稳,没有出现明显危险或突发情况。当车辆表现本身足够稳定时,乘客可能更多依赖实际乘坐体验,而不是屏幕上的轨迹信息来判断是否可信。
这提醒我们:信任不是简单“看见更多信息”就能建立的。真正影响乘客信任的,可能是车辆行为是否稳定、是否符合预期,以及界面是否解释了车辆决策背后的原因。
表1:系统透明度、信任、MSAQ 与 MISC 的统计模型结果
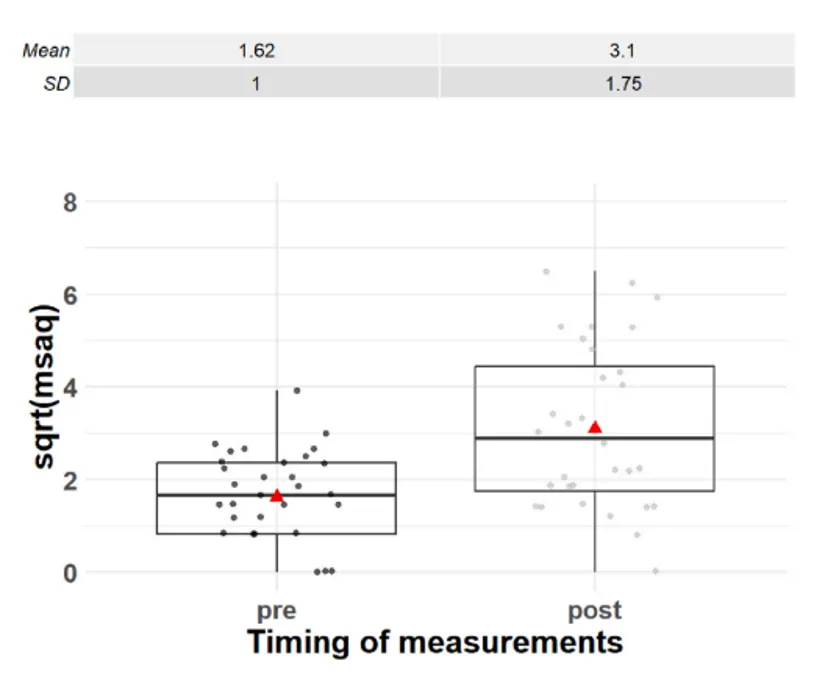
2. 轨迹信息对晕车有一点帮助,但不够明显
在晕车方面,研究结果更加微妙。
从整体统计结果来看,动态轨迹 HMI 对晕车程度没有显著影响。也就是说,单纯显示车辆未来轨迹,并不能稳定地减少乘客在观看车内视频时产生的晕车感。
不过,研究也发现,在显示轨迹信息的条件下,部分晕车指标的上升幅度更小。例如,一些胃肠道相关、中央神经相关和嗜睡相关症状在“有 HMI”条件下没有像“无 HMI”条件下那样明显增加。
这说明轨迹信息可能确实有一定缓解潜力,但作用不够强。原因在于,当前 HMI 主要告诉乘客“车辆准备往哪里走”,却没有充分表达“车辆接下来会如何运动”。
对于晕车来说,乘客真正需要预判的不只是路径方向,还包括加速、减速、刹车强度、转弯幅度和车身横向运动。如果界面只显示二维轨迹,而没有传达加速度变化,乘客仍然难以提前做好身体和心理上的运动预期。
图4:乘车前后 MSAQ 晕车问卷分数变化
3. 第一次乘坐体验,比界面信息更重要
这篇论文中最值得设计师关注的结论,是关于“第一次乘坐体验”的发现。
研究发现,参与者在完成第一次无人驾驶乘坐后,信任水平明显提高。也就是说,对于从未坐过无人驾驶车的人来说,只要第一次真实体验足够顺畅、安全和稳定,他们对系统的信任就会快速建立。
但到了第二次乘坐时,信任提升幅度不再明显。这说明信任增长并不是无限累积的,初次体验可能是最关键的信任建立窗口。
对于无人驾驶服务运营商来说,这一点非常重要。与其只在界面上堆叠更多自动驾驶信息,不如优先保证用户第一次乘坐时的整体体验:路线选择是否平稳、车内提示是否清晰、车辆动作是否可预期、乘客是否知道发生了什么。
换句话说,第一次坐得安心,比第一次看见多少技术信息更重要。
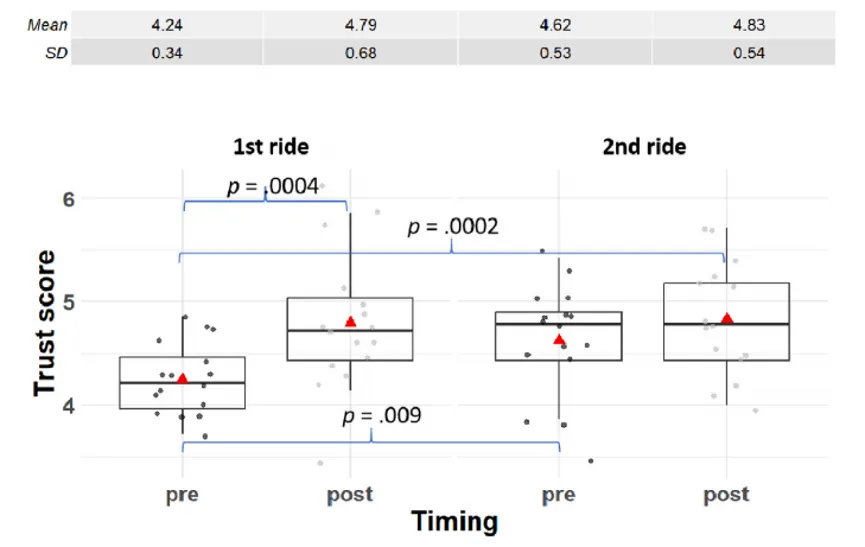
图5:第一次与第二次乘坐前后的信任分数变化
PART04 总结与展望
这篇研究的意义,并不在于证明“动态轨迹 HMI 没有用”,而在于提醒我们重新理解自动驾驶座舱中的信息设计。
1. 信息可视化不等于有效沟通
很多智能座舱设计习惯于把系统数据直接展示给用户,例如周围车辆、车道线、检测目标和未来轨迹。但对普通乘客而言,他们真正需要的不是系统内部数据的完整呈现,而是能够理解车辆行为的解释框架。
如果界面只是告诉乘客“车要往这里走”,却没有解释“为什么这么走”“接下来会不会减速”“是否因为前方有障碍物而变道”,那么这种信息对信任建立的帮助就会非常有限。
2. 自动驾驶 HMI 需要从“展示动作”走向“解释原因”
论文指出,当前轨迹界面主要提供的是 action-based information,也就是基于动作的信息。但未来更有价值的方向,是提供 reason-based information,也就是基于原因的信息。
例如,当车辆减速时,界面可以说明是因为前方红灯、行人横穿或跟车距离变化;当车辆变道时,界面可以说明是为了避让慢车、规划转弯或提升行驶效率。这样的解释更有助于乘客建立对系统的心理模型。
3. 缓解晕车不能只靠视觉轨迹
对于晕车缓解而言,视觉轨迹只是其中一个维度。未来 HMI 设计可以进一步加入加速度信息,例如用颜色深浅、动态线条粗细、节奏变化来提示即将到来的加速、减速或转向强度。
同时,研究也提示,视觉通道常常会被视频、手机或其他任务占用。因此,声音提示、座椅振动、触觉反馈等非视觉通道,可能比单纯视觉信息更容易被乘客感知,也更适合用于运动预告。
4. 第一程体验是建立信任的关键窗口
对于无人驾驶服务而言,用户的第一次乘坐体验具有非常高的价值。第一次乘坐如果能够让用户感到平稳、可控和可理解,信任会明显提升;而后续体验更多是在维持和巩固信任。
因此,未来 Robotaxi 或自动驾驶座舱设计,不应只关注“界面多酷炫”,还应关注初次用户的完整体验路径:上车前如何建立预期,上车后如何解释车辆行为,行驶中如何降低不确定感,下车后如何强化安全感。
本文基于国际权威期刊《Applied Ergonomics》发表的论文《Effect of riding experience and HMI on users’ trust and riding comfort in fully driverless autonomous vehicles: An on-road study》撰写。原文链接:https://doi.org/10.1016/j.apergo.2025.104580 ,原论文知识产权归杂志社及原作者所有,如有侵权,请联系删除。
封面图来源:ChatGPT
i读
“i读”通过紧跟时事热点、分享国内外设计领域优质论文、论文撰写经验与iDi项目介绍,让读者在平时的点滴积累中深入理解、掌握设计研究方法,提高学术研究能力与论文写作水平
◆ ◆ ◆ ◆ ◆
编辑:李昊宸 李紫妍
编辑责任人:张书铭



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
