今天我们要给大家分享的,是由北京科技大学团队发表在人工智能与工程应用领域知名 Top 期刊《Engineering Applications of Artificial Intelligence》上的重磅研究成果——《Passable area segmentation for open-pit mine road from vehicle perspective》(车载视角下的露天矿山道路可通行区域分割。文章的通讯作者是北京科技大学机械工程学院的孟宇教授。他的主要研究方向为智能车辆自动驾驶技术、计算机视觉与多模态目标识别。文章的第一作者是北京科技大学机械工程学院的博士研究生郑超。主要研究方向为车载智能视觉感知、小样本目标学习、无边界语义分割与点云处理。
该工作针对矿用车临近悬崖、无清晰路缘等极端场景下的安全感知痛点,‘双管齐下’提出了首个开源的车载视角像素级矿路数据集 MRSS,并配套设计了高精度的 TrRoad-Net 分割算法。下面,让我们一同走近这项研究,探讨其背后的学术探索与工业落地价值。
一、 矿区感知痛点:无车道线与悬崖危机
在露天矿山中,主力车辆通常是宽体矿用车。由于矿卡摄像头部署位置较高、视野极广,道路图像往往呈现出大面积的低频特征(如质地单一、无明显车道线的沙石路面)。
更为致命的是,矿区道路往往建在崇山峻岭之中,道路两侧极易出现巨大的落差,甚至是临河或绝壁悬崖。一旦感知算法对路缘识别出现丝毫偏差,就会对自动驾驶矿车造成极大的安全隐患。
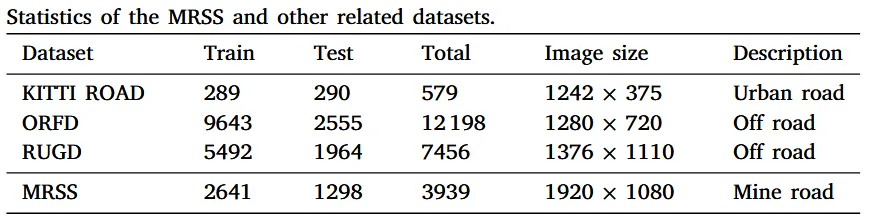
因此,感知系统在关注路面整体低频特征的同时,必须高度聚焦路面边缘细节的“高频特征”。然而,目前已有的公开道路数据集(如KITTI、ORFD、RUGD等)要么属于规整的城市道路,要么纹理与矿区大相径庭,无法直接应用于露天矿山场景。
二、 填补空白:MRSS 矿区道路分割数据集
为了解决矿区缺少像素级精细标注数据集的燃眉之急,研究团队使用宽体车作为采集平台,在运行环境下拍摄了数以百计的视频并进行了精密标注,构建了MRSS(Mine Road Scapes Segmentation)数据集。
图2:研究团队所采用的真实大型矿用宽体车数据采集平台
图3:MRSS 与 KITTI ROAD、ORFD、RUGD 等主流数据集的参数对比
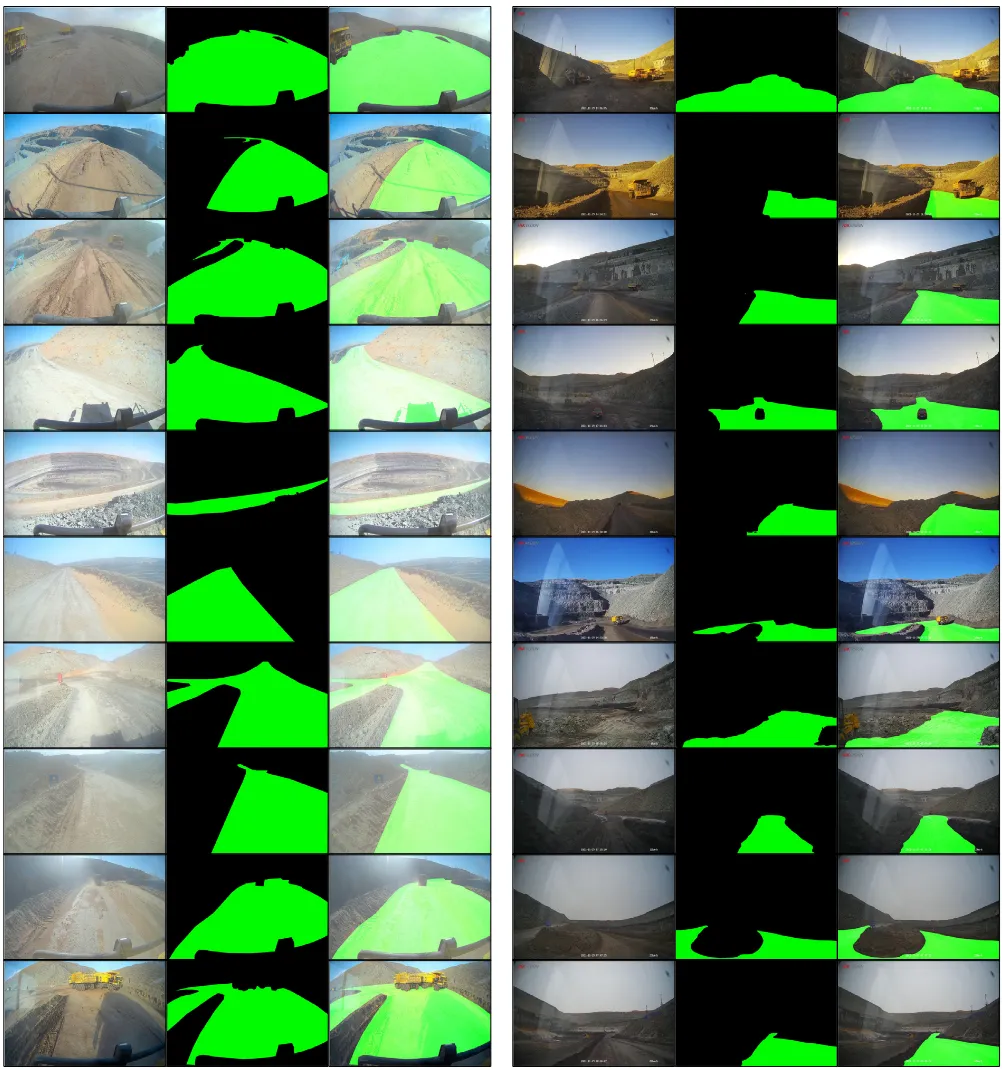
图 4:MRSS 数据集在不同光照、不同地貌矿区的精细分割标注示例
三、核心设计:结合Transformer与CNN 的TrRoad-Net
针对露天矿道狭长、边界模糊的几何特征,研究团队设计了全新的 TrRoad-Net 网络架构。通过引入卷积机制,使原本由于自注意力计算而容易导致边界模糊的 Transformer 重新具备了极佳的局部位置感知能力。
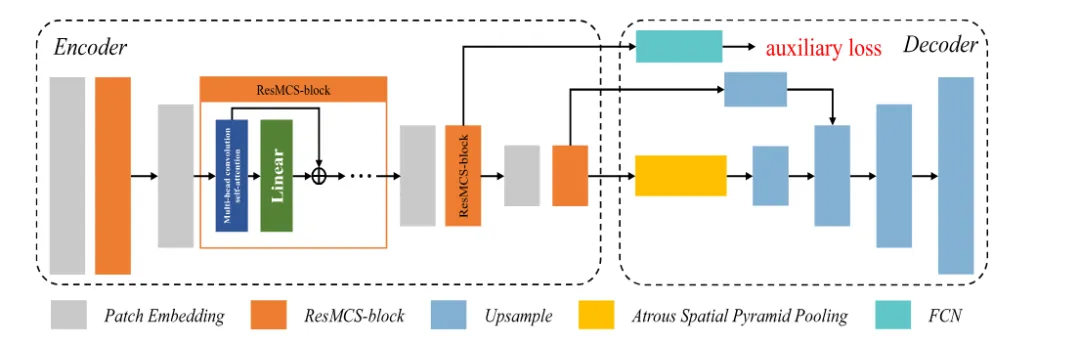
图 5:TrRoad-Net 整体的“编码器-双解码器”架构
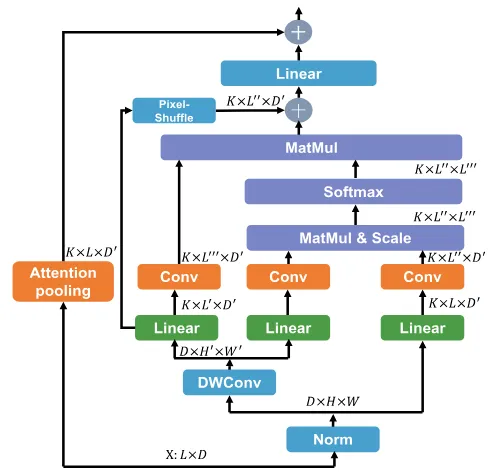
图 6:新型多头卷积自注意力与残差注意力池化的示意图
在整体架构上,TrRoad-Net 采用了先进的‘对称式编码-双解码器(Encoder-Decoder)’拓扑,通过多尺度特征的分层提取与自适应对齐,实现了对矿道可通行区域的高精度重建。在特征编码阶段,输入图像经分幅后送入级联堆叠的 ResMCS 骨干网络中;其核心计算单元——多头卷积自注意力(MCS)模块,首先利用二轴深度可分离卷积(DWConv)建立相邻像素的空间局部约束,并引入自适应注意力池化(Attention pooling)对自注意力尺度进行压缩以削减运算开销,同时配合像素重组(PixelShuffle)层将注意力重组的高频细节补偿回特征空间,从而在源头保留了精准的位置先验;而在特征解码阶段,网络采用了主、辅双分支设计:主分支利用空洞空间金字塔池化(ASPP)在多个膨胀率下捕获多尺度的感受野信息,并通过跳跃连接(Skip connection)将早期的浅层高分辨率特征级联对齐;辅分支则基于轻量化全卷积网络(FCN)计算辅助损失(Auxiliary loss),对网络权重进行多目标约束与联合优化。这一‘微观局部重构与宏观尺度融合’的多级级联机制,使 TrRoad-Net 具备了优异的高低频特征均衡学习能力,在各类复杂的矿区工况下均表现出较强的感知鲁棒性。
四、实验评估与可视化效果对比
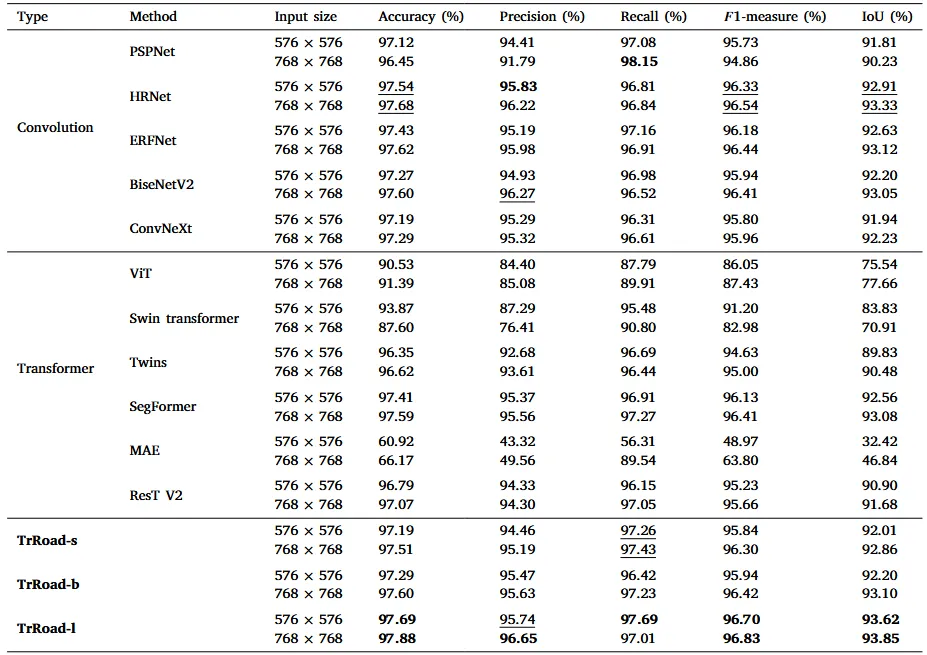
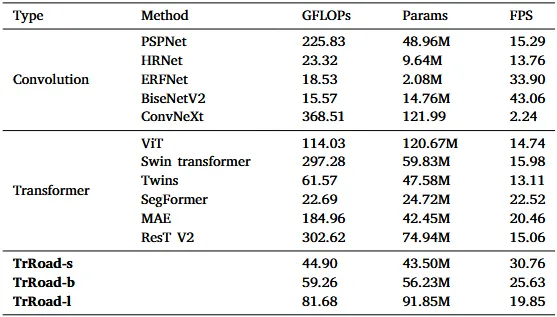
为了验证模型的优越性,研究团队将 TrRoad-Net(包含三个不同体量的版本:s、b、l)与当下的主流 CNN 及 Transformer 架构进行了全方位评估。
图 7:不同算法在精度、召回率、F1和IoU等五个指标上的定量对比
实验定量分析显示,高精版 TrRoad-l 取得了较高的 IoU 表现,达到了 93.62%;而轻量化版本 TrRoad-s 在大幅度削减参数量的同时,其推理速度在嵌入式设备上能够达到 30.76 FPS 的优异水平,极具工程实用价值。
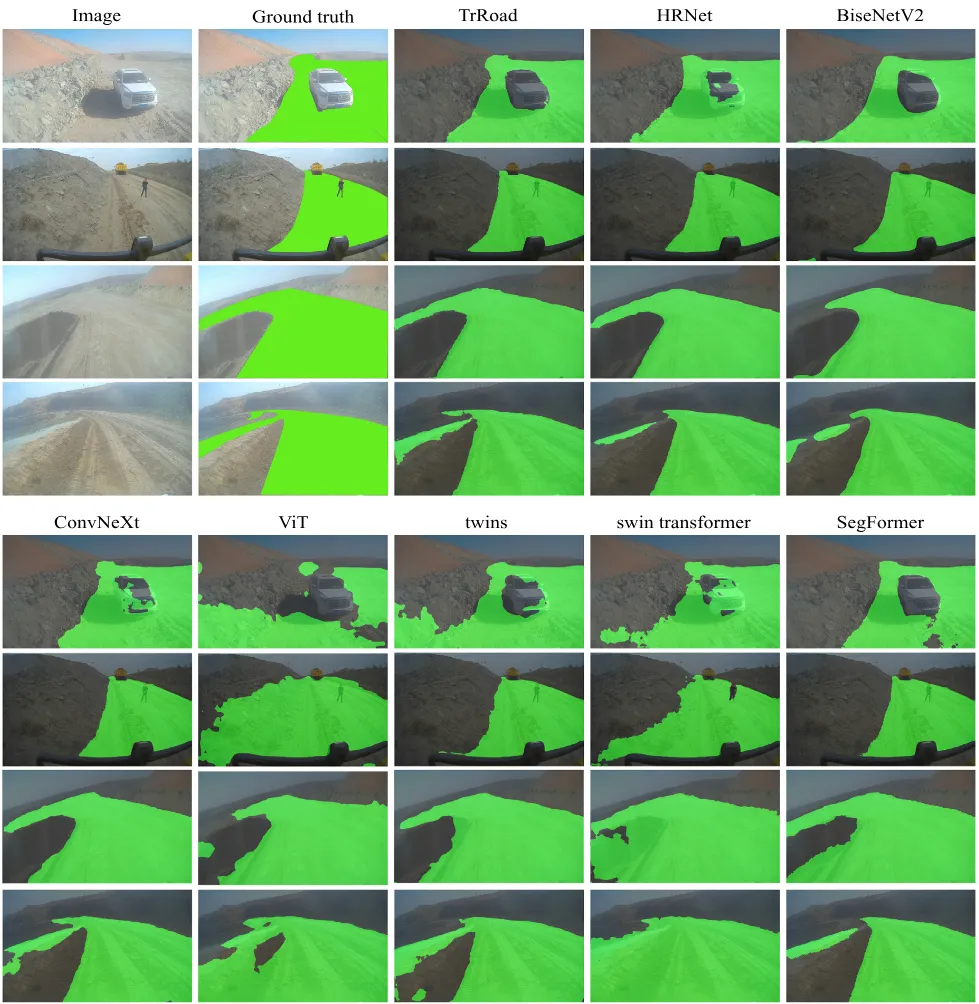
图 8:TrRoad-Net 与其他先进方法在道路边缘、障碍物绕行场景下的定性视觉对比
🏁 总结与未来展望
北京科技大学团队提出的 MRSS 数据集与 TrRoad-Net 分割网络,为非结构化露天矿区下的自动驾驶可通行区域感知搭建了高效、实用的模型样板。 未来,团队将着重扩充数据集以覆盖雨雪、大雾等极端恶劣天气下的工况,并致力于视觉与激光雷达(LiDAR)的多模态数据融合技术的研究,为保障矿山智能化、安全、常态化安全运营提供更有力的支持!
论文链接:
https://doi.org/10.1016/j.engappai.2023.107610
代码开源:
https://github.com/miniflash/trroad
文献开源,感兴趣的可以自己下载阅读全文,希望分享的文章对您有帮助,谢谢大家!


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
