注:本文节选自《AI汽车:场景生成与测评》,由机械工业出版社出版本书对于智能驾驶公司及零部件企业开展设计验证、算法评估、产品测试工作具有较高参考价值,也可为相关政府机构制定标准提供有益借鉴,同时,本书对于科研工作者及检测认证行业的从业人员也有较大的参考作用,还可以作为普通高等院校相关专业本科生或研究生教材。
7.3 不同国家的测试标准
随着自动驾驶技术的快速发展,全球各国相继制定了针对自动驾驶车辆的测试标准和政策,这些标准涵盖了自动驾驶车辆技术研发、道路测试、安全法规等多个方面。各国标准的制定为自动驾驶技术的发展提供了规范框架,同时也为测试评价体系的建立提供了重要的参考依据。本节将对不同国家的测试标准进行梳理和介绍。
7.3.1 公认的国际标准
对于高级自动驾驶系统的开发,公认的国际标准有ISO 26262:2018《道路车辆—功能安全》和ISO 21448:2022《道路车辆—预期功能安全》。其中,ISO 26262 是针对汽车电气电子系统的功能安全工程标准,ISO 21448 是对ISO26262 的一个补充,是识别危险状况的架构,以及风险级别降到可接受范围之前的验证和确认状态的方法。
另外,国际自动机工程师学会(SAE International)制定的汽车自动驾驶功能分级[13] 也是公认的行业标准,详见表7-8。
7.3.2 我国的国家标准和研究现状
我国虽然起步较晚,但是目前针对自动驾驶和智能网联汽车的发展也提出了许多标准[16]。2015 年9 月发布的《〈中国制造2025〉重点领域技术路线图》首次提出了智能网联汽车概念并对其进行了分级;2017 年发布的《新一代人工智能发展规划》指出了自动驾驶技术将逐步投入到实际应用中这一战略目标;2018 年4 月发布的《智能网联汽车道路测试管理规范(试行)》是我国首个针对自动驾驶车辆测试的考核评价标准。另外,我国发布的《智能网联汽车自动驾驶功能测试规程(试行)》中也提出了具体的测试标准和34 个测试场景。
我国还积极推进智能网联汽车测试示范区的建设,目前已经有国家智能汽车集成系统试验区(i-VISTA)、中德智能网联汽车四川试验基地、国家智能网联汽车应用(北方)示范区等十余个国家级测试示范区。
我国有许多企业也进行了自动驾驶车辆的研究。百度建立了自动驾驶模拟系统Apollo,开展了大量的虚拟测试。Apollo 仿真平台搭建在百度云和Azure上,仿真场景分为人为预设的场景Worldsim 和由路测数据提取的场景Logsim两种。Apollo 仿真平台也提供了场景通过判别系统,从交通规则、动力学行为和舒适度这几个方面对自动驾驶算法进行评价。51VR 公司自主研发了一款集多传感器仿真、交通流与智能体仿真、感知与决策仿真、自动驾驶行为训练等一体化的自动驾驶仿真与测试平台51Sim-One。
7.3.3 美国的国家标准和研究现状
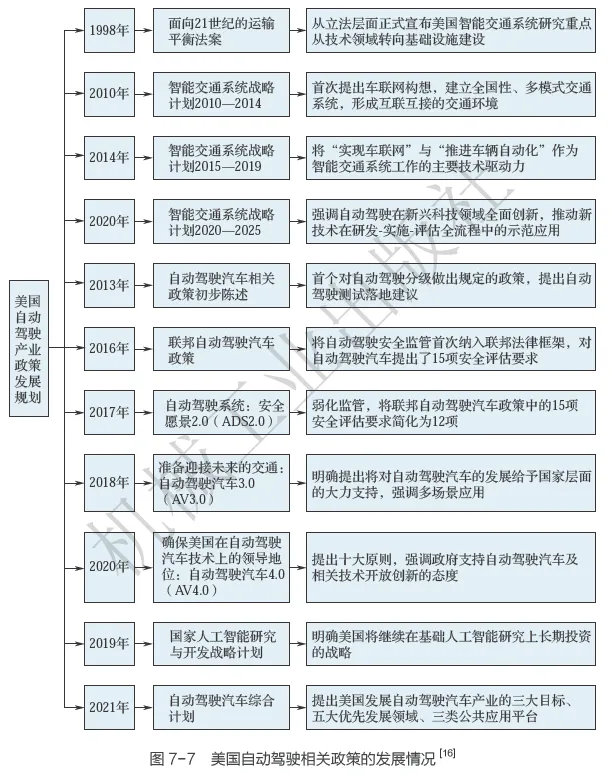
美国在自动驾驶产业的政策制定方面实施了“早谋划、早定位、早布局”的发展战略。早在1991 年,美国国会就确立了由美国交通运输部负责智能交通系统(Intelligent Transportation Systems,ITS)的研究及应用工作。这一战略为自动驾驶技术的研究和发展奠定了基础。进入21 世纪后,美国出台了十余项与自动驾驶相关的政策法规和战略规划,如图7-7 所示。这些政策为自动驾驶车辆的创新、研发、测试和安全部署制定了相关的政策标准和支持。
特别是2013 — 2018 年,美国相继发布了多项关键政策文件,包括《对自动驾驶车辆管制政策的初步意见》《联邦自动驾驶汽车政策》《自动驾驶系统:安全愿景2.0》《自动驾驶法案》以及《准备迎接未来的交通:自动驾驶汽车3.0》等文件。这些文件明确了在自动驾驶车辆研发和实际部署过程中的政策框架,涵盖了车辆测试、驾驶安全、监管要求等多个方面,为自动驾驶技术的实施提供了法律和政策保障。
此外,美国在自动驾驶的测试与应用方面也积极的布局。美国在全国9个州建立了10 个自动驾驶试点试验场,其中包括全球首个自动驾驶封闭测试区——密歇根大学的Mcity 试验场。通过这些试点,自动驾驶技术得到了广泛的验证和优化,测试环境的多样化促进了技术的快速发展。2021 年发布的《自动驾驶汽车综合计划》进一步强调了加快自动驾驶技术创新的必要性,并设立了相应的政策保障措施,包括建立信息透明机制、改善交通监管环境等,为自动驾驶技术的商业化应用提供了强有力的政策支撑。
经过多年的发展,美国已经建立了全球领先的自动驾驶领域政策体系,为全球自动驾驶产业的创新和部署提供了宝贵经验和有力支持[17-19]。
7.3.4 德国的国家标准和研究现状
德国作为传统汽车产业的技术强国,积极推进自动驾驶产业的发展,并在欧盟范围内率先推动了相关政策法规的制定与完善。2015 年,德国出台了《自动和联网驾驶战略》,计划利用数十亿欧元来完善道路交通网络基础设施,并鼓励智能汽车的研发与生产。这一战略的实施为德国自动驾驶技术的发展提供了重要的政策支持。
在自动驾驶领域,德国的政策走在了世界前列。2017 年6 月,德国发布了全球首部关于自动驾驶的法律——《道路交通法第八次修正案》,该法律的出台推动了自动驾驶技术的道路测试。根据修正案,德国允许在车辆上安装并使用L3 级自动驾驶系统,并规定了自动驾驶模式下的责任认定、驾驶员的权利与义务,以及自动驾驶引发交通事故后的赔偿事宜。此外,德国还开放了A9高速公路的部分路段,用于自动驾驶车辆的道路测试,为自动驾驶技术的实地应用提供了宝贵的测试平台[15-16]。
2017 年,德国发布了《自动驾驶道德准则》,明确了自动驾驶系统在使用过程中对人身权益的保护规则,这一准则为自动驾驶车辆的安全性和伦理性提供了基础保障。2021 年,德国进一步颁布了《自动驾驶法》,允许L4 级自动驾驶汽车在特定场景下上路行驶。这项立法仅针对L4 级自动驾驶汽车[20],明确了在运行范围、管理流程等方面的规范,确保自动驾驶技术在特定环境下的合法性和安全性。
2022 年,德国通过了《自动驾驶汽车批准与运行条例》,详细规定了自动驾驶汽车上路行驶的申请程序,明确了监管机构和汽车制造商的相关义务,进一步完善了自动驾驶技术的法律框架。这一条例的出台为自动驾驶汽车的实际应用铺平了道路,也为全球自动驾驶政策的制定提供了参考。
作为全球汽车工业的核心国家,德国在汽车产业的转型过程中注重技术创新,特别是在自动驾驶技术的发展上,不仅加大了政策支持力度,还通过立法为L3 和L4 级自动驾驶系统的上路行驶提供了合法保障[21]。德国是全球较早允许L3 和L4 级自动驾驶系统上路的国家之一,这为推动全球自动驾驶技术的标准化与应用提供了积极的示范作用。
7.3.5 英国的国家标准和研究现状
英国政府高度重视自动驾驶产业的广阔前景,并将其发展上升至国家战略层面,积极推动政策法规的制定与实施,以促进自动驾驶技术的创新和应用。自2015 年以来,英国先后启动了多个关键的自动驾驶示范项目,包括Autodrive、GATEway 和Venturer 等,旨在解决自动驾驶技术发展和产业化过程中所面临的各类问题。这些项目不仅为技术创新提供了平台,也为实际应用的测试和验证奠定了基础[15-16]。
2015 年,英国政府开始梳理和制定自动驾驶相关的政策法规,并发布了《通向无人驾驶汽车之路:测试行为和规范》[22],为自动驾驶企业提供了系统的测试操作指南。这一规范的发布为行业提供了明确的测试标准,确保了测试过程中安全性和可操作性,为自动驾驶车辆的研发和推广提供了有力支持。
2017 年,英国先后发布了《汽车技术和航空法案》及《联网和自动驾驶汽车网络安全关键原则》,明确了自动驾驶车辆在发展过程中需要遵守的安全性和网络安全要求。这些法律文件为自动驾驶技术的安全性提供了法规保障。
2018 年,英国出台了《自动与电动汽车法案》,进一步完善了自动驾驶车辆的保险规则,将车辆强制保险范围延伸至自动驾驶汽车。这一法律改革为自动驾驶汽车的商业化应用提供了必要的保险支持,解决了自动驾驶车辆在事故发生时的责任划分问题,为企业和消费者提供了保障。
2022 年,英国发布了《互联和自动出行2025:在英国释放自动驾驶汽车的效益》报告[23],旨在为2025 年自动驾驶汽车的商业化落地提供立法监管保障。该报告提出了一系列措施,包括推动基础设施建设、完善道路规则以及优化监管体系,为自动驾驶产业的快速发展创造了有利条件。
英国政府在自动驾驶领域的政策实施高度重视产业发展对国民经济的推动作用,出台了多项措施以释放自动驾驶产业的潜力,尤其在自动驾驶汽车保险制度的创新方面,为解决事故责任划分提供了有效的法律框架。这些改革措施为全球自动驾驶领域提供了宝贵的经验,值得各国在推进自动驾驶技术时进行借鉴和参考[24-25]。
7.3.6 其他国家的标准和研究现状
除了上述几个国家,法国、瑞典、荷兰等欧洲国家,以及日本、新加坡、韩国等亚洲国家也纷纷开展了自动驾驶领域的相关研究和标准制定。各国在自动驾驶技术的研发、测试和应用方面取得了显著进展,并且积极推动国际合作,制定了一系列政策和法规以促进技术的安全发展和商业化落地。
例如,法国和德国合作推动了跨境公路自动驾驶测试项目,旨在解决不同国家道路条件、交通规则以及文化差异对自动驾驶系统的影响。这一跨境测试为自动驾驶技术在欧洲的推广提供了宝贵的数据支持,并促进了国际的技术交流与合作。
在日本,政府通过推动“无人驾驶评价据点整备项目”,积极推动自动驾驶技术的应用和测试。2016 年,日本发布了《自动驾驶系统道路实证测试指南》,这是首次从制度上对自动驾驶道路测试的安全要求进行规范,为自动驾驶车辆的实际路测提供了法律框架。紧接着,2017 年发布的《远程自动驾驶系统道路测试许可处理基准》进一步明确了“远程监控员”的职责,确保在自动驾驶测试过程中能及时采取应对措施,保障道路安全[26]。此外,日本还对《道路交通法》和《道路运输车辆法》进行了多次修订,将自动驾驶模式下的交通事故纳入传统汽车强制保险的适用范围[27],为实现L3、L4 级别的自动驾驶提供了法律保障。
在欧洲,瑞典建立了AstaZero 主动安全测试区,这一测试区专注于测试自动驾驶系统在复杂和危险交通场景中的表现,旨在为全球自动驾驶技术的研发提供真实世界的测试环境。瑞典的AstaZero 测试区不仅为本国的自动驾驶研发提供支持,也成了国际上一个重要的测试平台。此外,欧盟设立了AdaptIVe 项目,旨在促进自动驾驶系统在城市环境中的应用,测试内容涉及从自动驾驶系统的功能验证到复杂城市交通环境下的安全性评估,为推动欧盟地区自动驾驶技术的进一步发展和应用提供了重要的支持。
新加坡和韩国也在积极推进自动驾驶的研发和政策法规建设。新加坡通过建设智能交通网络,推动自动驾驶车辆在公共交通系统中的应用,并实施了包括道路测试和驾驶行为评估在内的多项政策措施。韩国则通过设立自动驾驶测试基地和加强政策法规建设,为国内外自动驾驶技术公司提供了良好的测试和发展平台。
总的来说,上述国家在自动驾驶领域的政策研究、技术开发、测试应用等方面不断推进,积极通过国际合作和法规制定推动自动驾驶技术的商业化应用。这些国家的经验和进展为全球自动驾驶技术的发展提供了重要的参考和借鉴。
前 言
第1 章
概 述
1.1 智能网联汽车概述 / 002
1.1.1 智能网联汽车的关键技术 / 003
1.1.2 智能网联汽车国内外发展进程 / 004
1.2 智能网联汽车的关键场景构建 / 008
1.2.1 关键测试场景的基本概念 / 008
1.2.2 关键测试场景的国内外发展进程 / 009
1.3 智能网联汽车的测试与评价技术 / 012
1.3.1 智能网联汽车测试与评价技术的基本概念 / 012
1.3.2 智能网联汽车测试与评价技术的国内外发展进程 / 014
1.3.3 智能网联汽车测试与评价理论体系 / 024
参考文献 / 032
第2 章
智能网联汽车仿真场景库构建
2.1 仿真测试场景 / 039
2.1.1 测试场景的定义 / 039
2.1.2 测试场景的要素 / 040
2.1.3 测试场景的分类 / 044
2.1.4 仿真测试场景的相关标准 / 048
2.2 仿真测试场景构建方法 / 053
2.2.1 逻辑场景构建方法综述 / 053
2.2.2 具体场景构建方法综述 / 056
2.3 仿真测试场景库的应用介绍 / 059
2.3.1 场景数据库构建的基本方法 / 059
2.3.2 自动驾驶测试场景库搭建 / 060
2.3.3 典型的场景数据库 / 063
参考文献 / 064
第3 章
智能网联汽车静态交通场景生成
3.1 静态交通场景的研究概述 / 070
3.2 AIGC 的基本原理 / 074
3.2.1 核心技术 / 074
3.2.2 主流的AIGC 方法介绍 / 076
3.2.3 扩散概率模型的基本原理 / 078
3.3 基于扩散模型的静态交通场景生成 / 080
3.3.1 系统架构 / 080
3.3.2 Road-UNet 网络架构 / 082
3.3.3 可控的道路结构生成 / 082
3.3.4 三维道路场景生成 / 083
3.3.5 场景级的道路评估和筛选模块 / 084
3.4 静态交通场景的有效性验证 / 084
3.4.1 实验设置 / 085
3.4.2 道路结构整体生成性能 / 086
3.4.3 可控的道路结构生成 / 088
3.4.4 可视化生成结果与分析 / 089
3.5 静态交通场景库的相关应用 / 091
参考文献 / 095
第4 章
智能网联汽车关键测试场景生成
4.1 测试场景复杂度设计 / 099
4.1.1 场景复杂度定义与计算公式 / 099
4.1.2 场景选取算法 / 101
4.2 用于智能驾驶车辆安全测试的关键碰撞场景
生成 / 102
4.2.1 数据驱动的关键测试场景生成方法 / 102
4.2.2 基于对抗的关键测试场景生成方法 / 104
4.2.3 基于先验知识的关键测试场景生成方法 / 106
4.3 用于智能驾驶车辆综合性能测试的关键边界场景
生成 / 107
4.3.1 自然驾驶场景泛化生成 / 110
4.3.2 自动驾驶车辆评估和场景自适应调整 / 110
4.3.3 静态场景生成和自适应优化算法 / 112
4.3.4 动态交通场景生成和自适应优化算法 / 113
参考文献 / 118
第5 章
基于软件在环的智能网联汽车仿真测试
5.1 软件在环仿真测试背景 / 124
5.2 主流的软件在环仿真测试软件 / 128
5.2.1 高保真驾驶场景仿真软件VTD / 131
5.2.2 高精度动力学仿真软件CarSim / 132
5.2.3 开源的综合性自动驾驶仿真平台CARLA / 135
5.2.4 开源交通流仿真软件SUMO / 137
5.3 高性能软件在环联合仿真测试平台 / 138
5.3.1 软件在环联合仿真平台整体架构 / 139
5.3.2 跨平台通信协议介绍 / 141
5.3.3 跨平台数据协议介绍 / 141
5.3.4 联合仿真平台的核心模块介绍 / 142
5.3.5 基于软件在环的联合仿真测试平台的应用案例介绍 / 145
参考文献 / 148
第6 章
实车在环仿真测试技术
6.1 实车在环仿真测试的背景介绍 / 152
6.2 试验台实车在环测试技术 / 154
6.2.1 试验台实车在环仿真测试的基本
原理 / 155
6.2.2 试验台实车在环仿真测试平台 / 156
6.2.3 基于试验台实车在环的自动驾驶自动化
评测系统 / 161
6.3 基于数字孪生的场地实车在环测试技术 / 166
6.3.1 基于数字孪生的场地实车在环测试技术原理 / 166
6.3.2 主流的场地实车在环测试项目介绍 / 167
参考文献 / 169
第7 章
实车自动化测试评价技术
7.1 实车测试的相关场景及相关评价方法介绍 / 173
7.2 实车测试场地的构建方案介绍 / 177
7.2.1 封闭场地测试 / 179
7.2.2 现有的封闭测试场地介绍 / 182
7.2.3 开放道路测试 / 187
7.2.4 现有的实车测试场地的问题与挑战 / 190
7.3 不同国家的测试标准 / 192
7.3.1 公认的国际标准 / 192
7.3.2 我国的国家标准和研究现状 / 193
7.3.3 美国的国家标准和研究现状 / 194
7.3.4 德国的国家标准和研究现状 / 196
7.3.5 英国的国家标准和研究现状 / 196
7.3.6 其他国家的标准和研究现状 / 197
7.4 实车自动化测试评价技术应用介绍 / 198
7.4.1 实车自动化测试评价流程简介 / 198
7.4.2 实车自动化评测相关应用 / 199
7.4.3 实车自动化评测系统的案例分析 / 202
参考文献 / 208
第8 章
智能网联汽车多维度评价体系与评价方法
8.1 综合评价体系 / 212
8.1.1 自动驾驶评价方法 / 213
8.1.2 测试评价指标 / 214
8.1.3 自动化评测体系 / 219
8.2 多维度综合测试评价指标介绍 / 221
8.2.1 安全性指标 / 222
8.2.2 驾驶舒适性指标 / 224
8.2.3 驾驶性能指标 / 225
8.2.4 标准合规性指标 / 228
8.2.5 交通协调性指标 / 228
8.2.6 评测指标间相关性分析 / 229
8.3 测试评价体系设计 / 230
8.3.1 指标权重确定方法 / 230
8.3.2 场景指标权重计算 / 231
8.3.3 全流程自动化评测体系 / 233
8.4 变尺度的客观多维度综合评测系统 / 236
8.4.1 系统架构 / 236
8.4.2 场景复杂度量化指数计算模型 / 238
8.4.3 客观的评测度量权重计算方法 / 241
8.4.4 智能驾驶自动化评测系统 / 242
8.5 基于AI 的智能驾驶测试技术的未来发展 / 243
8.5.1 AI 技术在自动驾驶测试中的前沿应用 / 243
8.5.2 AI 驱动的智能驾驶评测体系进化 / 244
参考文献 / 245
附录 缩略语 / 248
点击以下链接购买
作者简介
王琳,上海交通大学教授、博士生导师,上海市曙光学者,长期从事网络化系统的控制、优化与博弈研究。
本书聚焦智能网联汽车研究领域的关键环节——测试场景生成与多维度综合测试评价方法,详细阐述了智能网联汽车静态交通场景的生成技术,并探讨了智能网联汽车关键测试场景的生成策略,充分挖掘了智能驾驶系统在极限条件下的性能表现,通过深入剖析智能网联汽车仿真场景库的构建,为智能驾驶车辆的测试提供了丰富且多样化的虚拟场景基础。本书还系统介绍了软件在环测试(SIL)、实车在环测试(VIL)以及实车测试三种主要测试模式,它们相互补充、相互验证,构建起一个完整的智能驾驶车辆测试链条。此外,本书还构建了一套多维度评价体系和评测方法,综合考量智能驾驶车辆在不同测试场景下的表现,为技术评估、产品认证以及市场准入提供客观、公正的依据。
本书由机械工业出版社出版,本文经出版方授权发布。
识别二维码报名



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
