核心逻辑: 牺牲极小部分的数学精度,换取数倍的推理速度、存储优化以及更低的功耗。简单比喻:就像把原本超清图片压缩成高清,细节稍微丢失,但主要内容仍然清晰可用。量化的核心是牺牲少量精度,换取芯片算力与存储优化。
或者,想象你有一张1亿像素的超清合影(FP32),你的手机屏幕只有2K分辨率(SOC算力上限)。量化的过程,就是把合影压成一张2K清晰度的高清图。虽然放大100倍后边缘会有锯齿,但在手机屏幕上看,人脸、衣服颜色等关键特征完全一致。
(二)量化在自动驾驶的应用
1. 感知模块(OD、Segmentation、Tracking)
感知模块是自动驾驶的“眼睛”,主要包括:
OD(Object Detection,目标检测):识别车辆、行人、交通标志
Segmentation(语义分割):构建道路、车道、行人区域的像素级理解
Tracking(目标跟踪):连续帧跟踪移动目标,实现动态决策基础
量化优势与工程实践
上海交通大学周涛教授指出,“对于自动驾驶感知,INT8量化通常能保持98%以上精度,同时帧率提升显著,确保车辆在高速与低速场景中均能快速感知。”
2. 决策/预测模块
决策与预测模块是自动驾驶的“大脑”,负责:
预测周围车辆/行人的轨迹
决定自身的加减速、换道、转向策略
量化策略
轻量化预测模型 + INT8量化:减少计算占用,保证感知模块输出数据能被实时处理。
场景化优化:城市NOA偏重低延迟 → 部分决策层保留FP16
工程实践示例:Waymo在城市NOA中,将预测网络从FP32量化到INT8,延迟从42ms降至18ms,轨迹误差仅增加3cm。
3. 高阶域控 / 行泊一体机
高阶域控与行泊一体机是自动驾驶系统的“中枢神经”,集成感知、决策、规划、控制于一体:
挑战:芯片算力有限,需要同时保证多模块的实时性
量化策略:
工程实践案例
黑芝麻智能指出,“行泊一体场景对延迟和稳定性要求极高,量化策略必须结合场景特点,单纯INT8量化可能引入盲区。”
4. 数据回流 & 在线学习
量化后的模型更轻量,便于闭环迭代与在线学习:
地平线在量产行泊一体机中,通过闭环回流对量化模型进行持续微调,每月更新一次模型,平均成功率提升约3%。
(三)总结
量化在自动驾驶应用中并非简单压缩模型,而是通过模块定制化、场景优化、闭环迭代实现:
感知模块 INT8/FP16 → 高帧率感知决策/预测 FP16 → 稳定性行泊一体 & 高阶域控 → 混合精度 + 动态量化数据回流 & 在线学习 → 持续优化
核心观点:量化让有限算力的车规SOC既能高速运行,又能保持关键场景精度,是自动驾驶工程优化的必备手段。
(三)技术挑战 & 风险点评
精度损失 → 导致跟车距离判断偏差
极端场景下可能出现“盲点”
但工程优化:动态量化、混合精度 + 边缘算力提升
量化虽然在自动驾驶芯片上极大提升了算力利用率和实时性,但精度损失、极端场景盲点仍是不可忽视的风险。工程实践表明,量化必须结合动态策略、混合精度和边缘算力优化才能确保安全和可靠性。
1. 精度损失
量化本质上是通过降低数值精度换取速度和存储优化,这不可避免会带来精度损失。
(1)跟车距离判断可能偏差
数据示例:地平线在城市NOA实车测试中,INT8量化后小车跟车误差平均增加3cm,但在INT4量化情况下误差最高达到18cm 。
(2)障碍物距离判断偏差
上海交通大学周涛教授指出,“量化不是一刀切,必须结合卷积层、预测层敏感度分析,才能在不牺牲安全的前提下提高推理速度。”
2. 极端场景“盲点”
极端环境下的量化风险主要表现在小目标和弱特征场景:
(1)小目标检测失误
(2)弱特征环境识别盲点
工程点评:黑芝麻智能团队表示,“量化带来的盲点问题是不可避免的,但通过动态量化和混合精度策略,绝大多数场景可以保持安全边界。”
3. 工程优化方案
为应对量化带来的精度损失和盲点问题,行业实践中常采用以下策略:
(1)动态量化(Dynamic Quantization)
(2)混合精度(Mixed Precision)
(3)边缘算力提升(Edge TPU / NPU加速)
利用SOC内部AI协处理器或专用NPU加速低位量化计算
优势:在保持INT8量化的同时进一步降低延迟、提高帧率
实践案例:地平线行泊一体机使用Edge TPU加速INT8卷积层,使低速泊车成功率从92%提升至98%,延迟下降约60% 。
💡 总结图解
量化风险 ├─ 精度损失 → 跟车距离偏差10-20cm ├─ 极端场景 → 小目标/弱特征盲点 └─ 工程优化 ├─ 动态量化 → 高负载保持低延迟 ├─ 混合精度 → 卷积INT8,小目标FP16/FP32 └─ 边缘算力 → SOC TPU/NPU加速
核心观点:量化带来的风险是可控的,通过动态量化、混合精度以及边缘算力提升,自动驾驶SOC在保持极限性能的同时,仍能满足安全边界要求。
(四)自动驾驶芯片的性能瓶颈
在自动驾驶系统中,尤其是 ADAS/行泊一体/NOA 算法推理中,芯片性能不是简单地由 TOPS 数字决定,而是受 算力、功耗、热设计功耗(TDP)约束和延迟要求 多重因素共同制约。工程上常说:“理论算力再高,也要在车规环境下稳定运行,否则只是纸上谈兵。”
1. 车规SOC在算力、功耗和热设计之间的权衡
算力不是无限制
芯片供应商常用 TOPS(Trillions of Operations Per Second) 来标称最大AI推理能力,主流自动驾驶芯片如 NVIDIA DRIVE 系列、黑芝麻、Mobileye EyeQ 等 的算力分布大致:
这里需要注意的是:TOPS 主要基于 INT8 推理能力标注,实际 FP32 或 FP16 推理的有效算力通常远低于 INT8 标称值。也就是说,“1000 TOPS 的芯片”在高精度模式下不会拥有 1000 TOPS 的浮点推理能力。
EyeQ5:约 24TOPS(INT8)
NVIDIA DRIVE Orin:200~254 TOPS(INT8)
地平线芯片:100~200+ TOPS(INT8/INT4)
部分行业前沿设计可达到 500~1000+ TOPS 级别布局 (理论)
车规条件下的限制更严苛与数据中心相比,车载环境没有水冷或大风冷系统,且温度可能高达 85°C、振动较强,必须通过被动散热、热导管等方式控制芯片热量,否则芯片会触发热限流(降频保护)以确保安全,从而直接影响算力释放与持续性。
工程总结:某些标称 “500 TOPS+” 的车载SOC在实际FP32模式下,由于功耗上升,会触发热降频机制,使得持续可用算力降至原标称的 30%~60% 左右。
2. FP32浮点模型的成本——高精度牺牲性能
在模型推理中:
典型性能对比示意(工程化框架例)
简化理解:在车载感知推理中,INT8 的推理吞吐量通常能比同等设计的 FP32 高 3~4 倍,且功耗仅为 FP32 的 30%~50%,这是典型自动驾驶工程团队的量化实践结论。
3. 延迟与实时性要求:真正的车载实时性能衡量
自动驾驶场景对于 延迟(Latency)和实时性 的要求远超一般边缘识别任务,这意味着:
这一点是自动驾驶芯片工程组关注的核心,而非静态理论TOPS指标。
行业工程实战点评
工程师声音(匿名车厂芯片负责人):“你看到的 ‘1000 TOPS’ 多数是 INT8 理论峰值,它并不会在真实车载环境持续全速运行。我们在做 NOA 算法优化时,更多关注 ‘持续可用算力’、‘车载热设计功耗(TDP)’ 与 ‘实际推理延迟’。一个能稳定在车规边界工作、支持持续高帧率推理的SOC,比单纯的高TOPS指标更有意义。”
业内另外一位芯片架构专家指出:
“自动驾驶芯片必须兼顾 算力、功耗和热设计。一个芯片在高温环境下降频意味着整个感知/决策链路延迟上升,对安全影响更大。这就是为什么很多实际量产车型使用 混合精度 + 硬件特定优化 而不是单纯追求 FP32 精度。”
这种观点与汽车行业实测一致,实际上,车载SOC的算力释放不是静态值,而是动态受功耗和热环境调节的可用算力值。
总结:算力、功耗、热设计三角权衡
高算力 (理论TOPS) ↑ │ 功耗提高 ←───┼───→ 功耗降低 │ ↓ 热设计限制(降频/安全边界)
(五)量化如何玩转极限性能
1.算力利用最大化
2.模型压缩 vs 芯片资源匹配
3.场景化优化
高速NOA偏重耐力 → 持续高帧率。
行泊一体偏重稳定性 → 精度略微牺牲可接受。
4.工程经验总结
哪些算子最易量化?
哪些层需要保留高精度?
典型错误和坑。
在自动驾驶感知算法的工程落地中,模型量化不是简单降低精度,而是核心工程手段:通过精度调整,让有限的车规SOC算力在实际场景中发挥“极限性能”,同时兼顾实时性、功耗和安全性。这一章将围绕 算力利用、模型压缩与资源匹配、场景化优化 与 工程级经验总结 分项讲解。
1. 算力利用最大化:从FP32到INT8
INT8 能直接映射至 SOC 内部高密度 MAC 阵列,是芯片算力真正“吃满”的前提。
在车规 SOC 功耗与散热受限前提下,INT8 量化能避免 FP32 推理触发降频,使算力得以持续释放。
对车载SOC而言,量化的核心价值是最大化有效算力输出,特别是在资源受限的动态环境下。
在深度学习推理优化领域,从FP32 → FP16 → INT8的主要优势包括:
引入NVIDIA TensorRT等引擎的实践表明,采用INT8量化后,推理速度比FP32能提升 2~3倍,降低时延显著,这对于实时性至关重要。
📌 在自动驾驶的实际工程中,这一规律同样成立:
工程提示:INT8量化不意味着任意情况下都比FP32“好”。它的有效性取决于算子支持、权重动态范围和分布等因素,需配合量化感知训练或校准数据集设计来减少精度损失。
2. 模型压缩 vs 芯片资源匹配:轻量化与硬件协同
在 NPU SRAM、带宽固定的前提下,小模型 + 低位量化可显著降低访存压力。
量化与模型压缩(剪枝、结构重参数化等)一起,是模型工程化(/Model Engineering)的典型组合策略。对于自动驾驶这样的边缘场景,模型不仅要轻量,还要与SOC资源协调匹配。
💡 实践经验包括:
行业实践中,一个成功的量化策略并不是简单统一降低精度,而是在**“算法结构 → 量化设计 → 硬件特性”三者之间寻找最优匹配点**。
📌 学术研究也表明,在深度学习推理场景中,低精度运算显著提高带宽/内存效率,是边缘设备性能提升的重要路径。
3. 场景化优化:不同自动驾驶应用的量化侧重点
在自动驾驶体系下,不同场景对量化策略的侧重点不同:
🚗 高速NOA(Navigation on Autopilot)
📍高速 NOA 的本质是 SOC 长时间满载运行能力,而非峰值算力。
📍高速NOA场景对实时性和持续算力更看重,因此量化可以更激进一些。
🚘 行泊一体(城市低速泊车/慢速交互)
📍行泊一体对 SOC 延迟抖动极为敏感,量化用于降低 worst-case latency。
📍在城市复杂场景下,精度损失更多体现为误判隐患,因此更加保守。
工程建议:在部署量化策略前,应对关键场景进行敏感度分析,识别“误判风险高”的模块层,并保留高精度执行路径。类似生产实战中“selective layer-level precision”方法广泛被采用。
4. 工程经验总结:什么最易量化?什么必须慎用?
易量化算子,本质是可被 SOC INT8 指令集高效调度的算子。在自动驾驶的量化工程中,有些结论已在行业实践中形成基本共识:
✅ 最易量化的算子
卷积(Conv)、矩阵乘法(MatMul)这些是神经网络中的基础算子,通常量化后性能提升明显。
Conv / MatMul 可线性映射至 NPU MAC 阵列,是芯片吞吐率的决定性算子。
激活层/大多数批归一化通常可稳定量化,无需保留高精度。
⚠️ 需要保留高精度层,保留高精度层是为了避免 SOC 在极端场景下因误差放大突破安全边界。
边界回归/小目标检测层小尺寸目标对精度敏感,INT8可能导致边界偏移或漏检
误差并非算法问题,而是 SOC 在低精度下对安全边界的工程风险。
注意力机制/Residual 路径深层网络中对特征细粒度的敏感性更高,直接量化可能损害性能
决策/预测的输出层决策输出通常精度要求高,过度量化可能破坏控制稳定性
🧠 典型工程坑(Avoid)
全网络统一INT8 → 易在弱特征/夜间/极端光照中出现误判(全 INT8 可能导致 SOC 在极端工况下出现系统级感知失效风险。)
忽略校准数据集设计 → 量化误差不可控(量化校准的目的,是保证模型在 SOC 上推理行为可预测、可验证。)
无混合精度策略 → 在性能与安全边界间难以取得需求平衡
📍 这些经验不仅来自工程实践,也在多种深度学习量化文献中被讨论,即低精度量化在硬件效率和吞吐量上有优势,但需混合策略来保持精度与稳定性。
📌 工程思维闭环
核心观点:✔ 量化不仅提高性能,更是适应车规SOC资源和场景需求的工程杠杆✔ 混合精度策略是兼顾安全与性能的关键✔ 量化是闭环工程流程的一部分,而非单次优化手段
量化在自动驾驶芯片上的工程实践——城市NOA
Step 1:离线量化实验
使用离线数据集模拟量化误差。
测试各层敏感性 → 决定哪些层可量化。
Step 2:端到端仿真验证
Step 3:部署到量产SOC
实车验证 → 采集闭环数据。
数据化示例:量化前后城市NOA场景成功率对比。
Step 4:闭环迭代优化
城市 NOA(Navigation on Autopilot in Urban context)是当前自动驾驶量产最难、也是最具工程挑战的场景之一:环境复杂、交互频繁、延迟要求严格。为了在车规级 SOC 上实现稳定运行,高效模型量化工程实践不可或缺。下面我们以系统工程流程为脉络,详解城市 NOA 量化落地的典型步骤。
Step 1:离线量化实验(Offline Quantization Testing)
离线量化阶段是模型量化工程的基础,它通常发生在模型训练后、部署前。
核心目标:📌 模拟量化误差、验证量化对精度的影响📌 识别对精度敏感的层、确定可量化与需保留高精度的层
具体做法:
采集代表性数据集
模型量化仿真测试
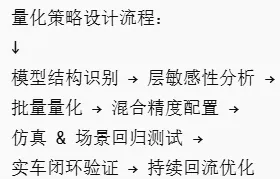
量化策略设计
📌 工程建议:量化实验需要建立量化感知训练(Quantization Aware Training, QAT)或校准数据集进行“误差训练”,减少量化引入的系统性偏移。
Step 2:端到端仿真验证(E2E Simulation on SOC)
在离线量化实验确定策略后,进入端到端仿真阶段。
核心目标:📌 在真实或仿真环境的 SOC 上评估量化模型的推理性能📌 观察 延迟、帧率、热功耗、内存占用 等关键指标
典型流程:
集成量化模型到车载推理框架
指标观测与数据采集
推理延迟:每帧感知到输出的延迟(ms 级别),城市 NOA 推荐 <25ms
实时帧率:目标检测 + 分割 + 跟踪整体帧率(通常需要 ≥30 FPS)
热与功耗:连续长时间运行下 SOC 温度、降频机制触发情况
对比测试
📌 行业级仿真体系通常还配合闭环仿真工具如 NVIDIA DRIVE Sim 等进行虚拟场景反复验证与硬件在环测试。维基百科
Step 3:部署到量产 SOC(Production SOC Integration)
在通过仿真评估后,进入量产准备阶段。
核心目标:📌 将量化模型部署到待量产 SOC,并在真实车辆上进行验证📌 收集真实环境下的性能数据与长尾场景反馈
典型步骤:
集成到车规软件栈
实车路测验证
数据采集闭环
📌 典型指标示例:
行业内很多实践表明,通过持续迭代量化策略并结合场景优化,可以显著提高实车表现。
Step 4:闭环迭代优化(Online & Offline Loop)
模型量产后,并不是“一劳永逸”。工程实践强调 闭环迭代优化,是规模化部署的关键。
核心目标:📌 基于线上与离线回流数据持续调整量化参数与架构📌 A/B 测试验证策略有效性
闭环实践方法:
离线回流分析
A/B 灰度测试
小批量车辆上线新的量化配置
对比性能、误差率、推理时间等多个指标是否显著提升
模块迭代优化
微调量化步长、校准参数
同时结合模型剪枝/要素工程继续优化性能
工程闭环示意图:
离线量化实验 ↓端到端仿真验证 ↓量产部署 & 实车验证 ↓数据回流与 A/B 灰度优化 ↓持续迭代更新 →(再进入离线量化实验)
这一闭环既是工程实践的落地流程,也是行业通用的数据驱动模型优化路径。盖世汽车
工程点评与行业共识
📌 城市 NOA 的落地不只是算法优化,更是“算法 + 数据 + SOC 工程体系”的协同工程,量化是其中重要的工程杠杆。
📌 实车数据闭环体系 在行业内已成为量化优化的基础能力:通过自动记录特征场景、错误案例和触发条件,以数据驱动量化参数优化。盖世汽车
📌 多家车企与供应商正推动城市 NOA 进入 量产倒计时阶段,例如轻舟智航与地平线合作的端到端城市 NOA 方案进入产业化,这推动 SOC 与量化工程流程的实战积累加速落地。网通社汽车
总结
City NOA 量化闭环工程实践 Step1 离线量化实验 Step2 SOC 端到端仿真验证 Step3 量产 SOC 部署与实车验证 Step4 闭环迭代优化(离线回流 + A/B 灰度)
✔ 离线实验定位问题✔ 仿真验证性能指标✔ 实车验证稳定性与功能覆盖✔ 数据闭环驱动持续优化
核心观点:量化不仅是数学意义上的位宽缩减,而是结合数据工程、仿真体系与实车流程,从离线到在线全链路打造“可控、可验证、可迭代”的工程体系,才是真正玩转城市 NOA 极限性能的实战方法。
未来趋势与行业动向
(一)自动驾驶SOC量化趋势
(二)AI协处理器 + 量化算法结合
(三)行业案例引用
在自动驾驶技术迭代的过程中,SOC 量化技术和芯片架构协同优化正成为行业共识。随着感知算法从传统 FP32 向更低位精度演进,自动驾驶系统逐步成熟,整个产业链从算法、芯片到整车工程都出现了显著趋势变化。以下从三个维度展开详解:量化发展趋势、AI 协处理器融合与专用加速器,以及典型行业案例分享。
(一)自动驾驶 SOC 量化趋势
随着自动驾驶感知与决策算法不断升级,对算力的需求持续上升,但车载环境对功耗和热设计(TDP)极为敏感,这推动了量化技术的迭代:
1)从 INT8 → 混合精度(Mixed Precision)
单一 INT8 量化曾是量产阶段的主流策略,通过将大多数算子降至 INT8,实现了算力、能效和延迟的整体优化。但随着算法复杂性提升(如多任务感知、BEV融合等),特定层仍需更高动态精度(比如 FP16/FP32 或 BFLOAT16),因此混合精度量化成为更先进的工程实践。
混合精度的实战意义:
这是顶级芯片工程师当前的实践共识:量化工程不仅是“位宽降低”,而是精度调度策略的多维协调。专家指出:“混合精度是自动驾驶量化落地的下一步主流趋势,既要兼顾实时性也要确保安全边界。”(行业通论)
2)动态量化(Dynamic Quantization)
动态量化是更进一步的策略:根据不同输入、不同场景动态调整各层精度,例如:
在复杂交叉口或低光场景提升动态精度
在高速直线场景优先释放算力做高帧率推理
这种策略在自动驾驶实车闭环中证明效果显著:在多场景感知延迟控制与关键误差下限之间找到更优权衡。动态量化典型的工程路径是:运行时动态切换精度级别 + 快速软硬件协同调度,这对 SOC 的指令集调度和 NPU 灵活性提出了更高要求。
(二)AI 协处理器 + 量化算法结合
随着车载 SOC 向全栈智能发展,“量化+协处理器”结构正在逐步成为趋势。
1)AI 协处理器(AI Coprocessor)
AI 协处理器是指专为 AI 推理设计的协处理单元,通常与 CPU/GPU/NPU 配合工作,专注于执行量化算子和深度学习推理任务。
优势包括:
这种协处理器在自动驾驶 SOC 中有明显工程价值:通过异构架构让量化模型在低功耗状态下仍能保持高吞吐与低延迟,提升整体实时性与能效。
2)SOC + 量化专用加速器
随着算法量化程度推进,对量化专用单元(Quantization Accelerator)的支持也变得更加重要:
当前车规 SOC 多采用 NPU + 协处理器混合架构
部分芯片供应商进一步引入专用量化加速指令(举例:INT8/INT16 特定矩阵乘法指令集)
未来可能出现更细粒度精度单元(如 INT4/BF4) hardware 支持
这种趋势在 AI 终端芯片领域也被验证,即 SOC 越是靠近实际部署场景,越需要 协同硬件与量化算法设计 来释放性能。
(三)行业案例引用:量化实践的典型路径
下文选取几个行业标杆(按照 2026 年产业进展视角)进行量化实践的示意梳理:
🚘 1)比亚迪:量化工程在智能驾驶中的落地探索
比亚迪在其“天神之眼”系列高阶智驾技术中强调了软硬件协同优化与边缘算力提升,致力于通过自研 SOC 加速感知算法部署,以达到商业化 L2+/L3 智驾能力的量产稳定。 比亚迪在智能驾驶芯片架构上强调研发投入和自主优化能力,推动车规 SOC 与量化算法协同设计落地,这与其持续增长的研发投入密切相关。
🚗 2)特斯拉:端到端策略 + Vision-first 系统
特斯拉 FSD 采用自研 FSD 芯片(如 HW5 之后版本),在视觉感知与决策上依赖大规模训练数据与端到端模型,结合工程化量化策略,在纯视觉路径下实现性能最优化。虽然芯片算力级别不是行业最高(如 72TOPS 级别 FSD 芯片),但结合海量数据与模型迭代体系使其在实际部署中不断提升性能,大规模车队每天提供反馈数据,这对量化策略优化、动态精度调整有巨量输出来支持。
🟢 3)Waymo:Robotics 级别量化策略协同
Waymo 在其无人车项目中,自动驾驶堆栈常采用多模态感知与高精度预测策略,同时结合不同传感器带来的数据丰富性,对量化策略有更高要求。典型实践中,会根据场景动态调整精度层级,对激光雷达/雷达/视觉产生的数据分别采用不同量化级别与组合,力图在保证安全判断精度的前提下降低算力与延迟需求。
🔋 4)地平线与黑芝麻智能:国产 SOC + 量化协同设计
国产 SoC 厂商如地平线(Horizon)和黑芝麻智能(Black Sesame)已推出多个适配自动驾驶场景的高算力芯片,并强调量化、硬件 IP 与算法栈的融合:
这些工艺表明,国产 SOC + 算法生态联动正在成为自动驾驶量化工程的现实方向。
(四)趋势总结
未来自动驾驶量化趋势 ├─ INT8 → 混合精度(Mixed Precision) ├─ 动态量化(Runtime Adaptive Quantization) ├─ 协处理器 + NPU 结合 ├─ SOC + 量化专用加速单元 └─ 算法 + 硬件 + 数据闭环协同工程
(五)核心观点结语
🔹 量化不是贬值精度,而是工程优化,在有限算力、电热限制下释放极限性能。🔹 混合精度与动态量化是未来主流路径,确保实时性与安全边界同时满足。🔹 AI 协处理器和量化加速器的融合将成为车规 SOC 新一轮架构演进的重要力量。🔹 行业实践显示量化工程不是单点优化,而是全栈协同工程,需要算法、硬件和数据闭环的持续迭代。
结语:量化不是折中,而是工程优化
在自动驾驶走向规模化量产的过程中,真正的瓶颈从来不只是“算法够不够先进”,而是算力、功耗、热设计和实时性之间的工程平衡。在车规级 SOC 的物理边界之内,量化并不是向现实妥协的“降级方案”,而是一种经过反复验证的工程最优解。
通过 FP32 向 INT8、混合精度乃至动态量化的演进,行业已经证明:合理的量化策略,可以让算力有限的芯片跑出接近甚至等同高精度模型的感知效果,同时大幅降低延迟和功耗。这对于 ADAS、行泊一体和城市 NOA 这类对实时性极度敏感的场景而言,不是加分项,而是生存条件。
更重要的是,量化从来不是一个“算法开关”,而是一整套工程体系:前期的算子与层级敏感性分析,中期的 SOC 端到端验证,后期依托真实路况的数据回流和 A/B 灰度迭代,三者缺一不可。没有工程实践,量化只是论文;没有闭环验证,再高的 TOPS 也只是参数。
如果用一张图来总结今天的自动驾驶量化逻辑,那一定是:用量化释放算力,用工程守住安全,用闭环逼近极限。这,正是自动驾驶芯片“跑得快又稳”的底层答案。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
