90ms vs 7ms:为什么自动驾驶离不开边缘计算?
- 2026-06-28 15:45:13
90ms vs 7ms:为什么自动驾驶离不开边缘计算?
(共计1550字 | 阅读时间4分钟)
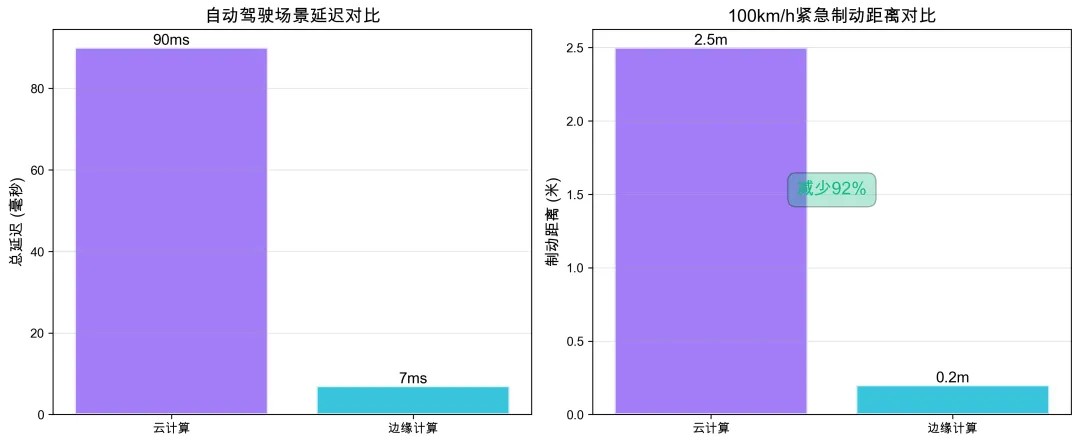
当汽车以100公里/小时的速度行驶时,0.1秒的误差意味着2.5米的差距。
这2.5米,可能是生与死的距离。
这就是为什么边缘计算越来越重要的原因。
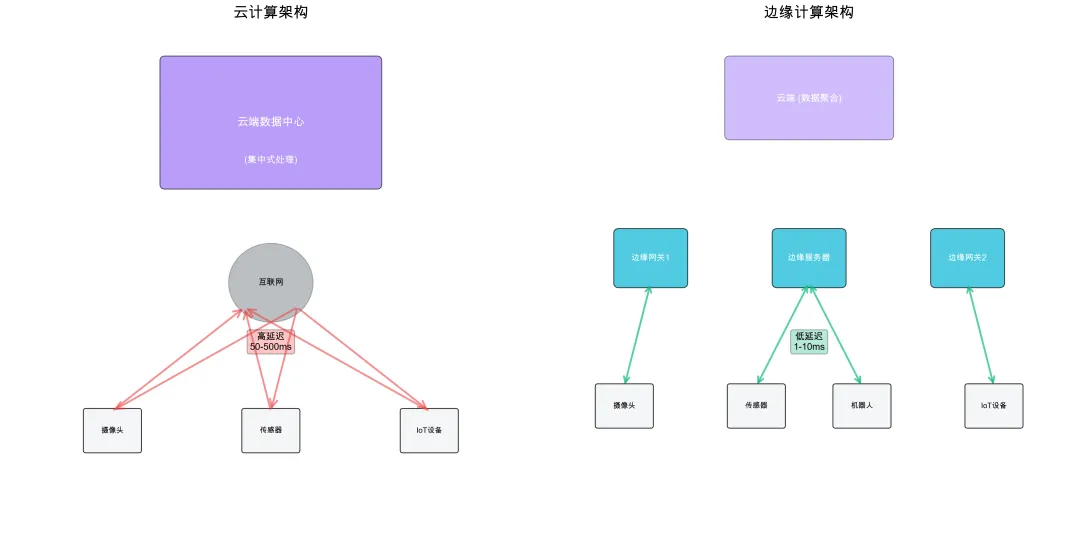
什么是边缘计算?
简单说,就是把计算从”云端”搬到了”边缘”——离数据产生的地方更近。
传统的云计算:摄像头拍视频 → 传到云端 → 云端分析 → 返回结果
边缘计算:摄像头拍视频 → 本地分析 → 立刻得到结果
核心区别就一个字:快。
数据说话:快多少?
场景1:自动驾驶紧急制动
| 7ms | 0.2米 |
制动距离减少92%——这就是为什么L4级自动驾驶必须用边缘计算。
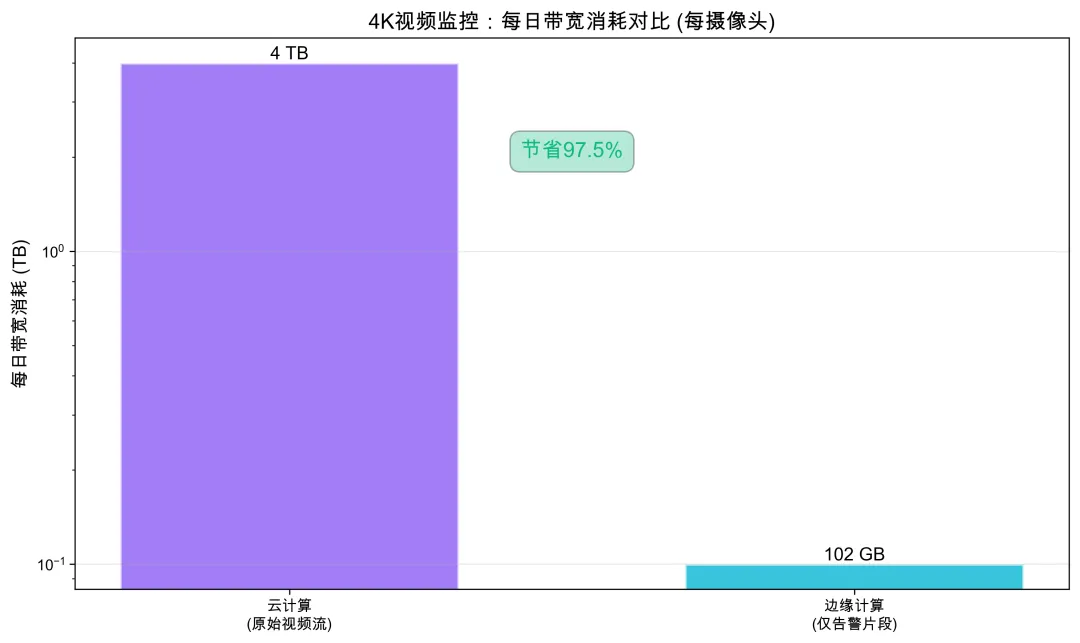
场景2:4K视频监控
| 100MB |
带宽节省97.5%——100个摄像头一年能省几十万网费。
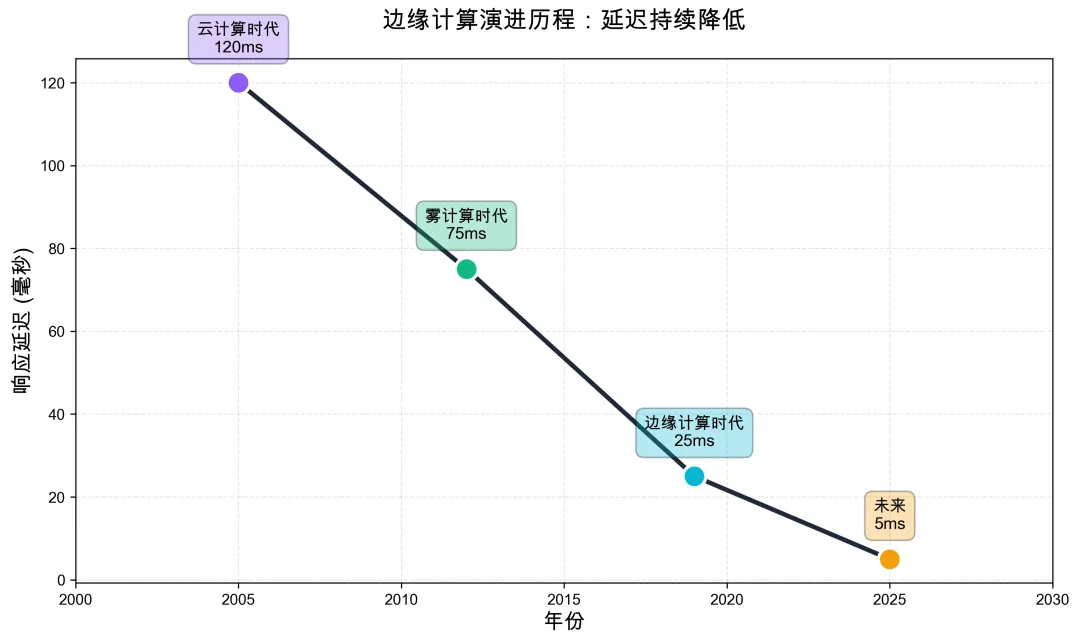
边缘计算的演进
从云计算到边缘计算,响应延迟从100ms+降到1-10ms:
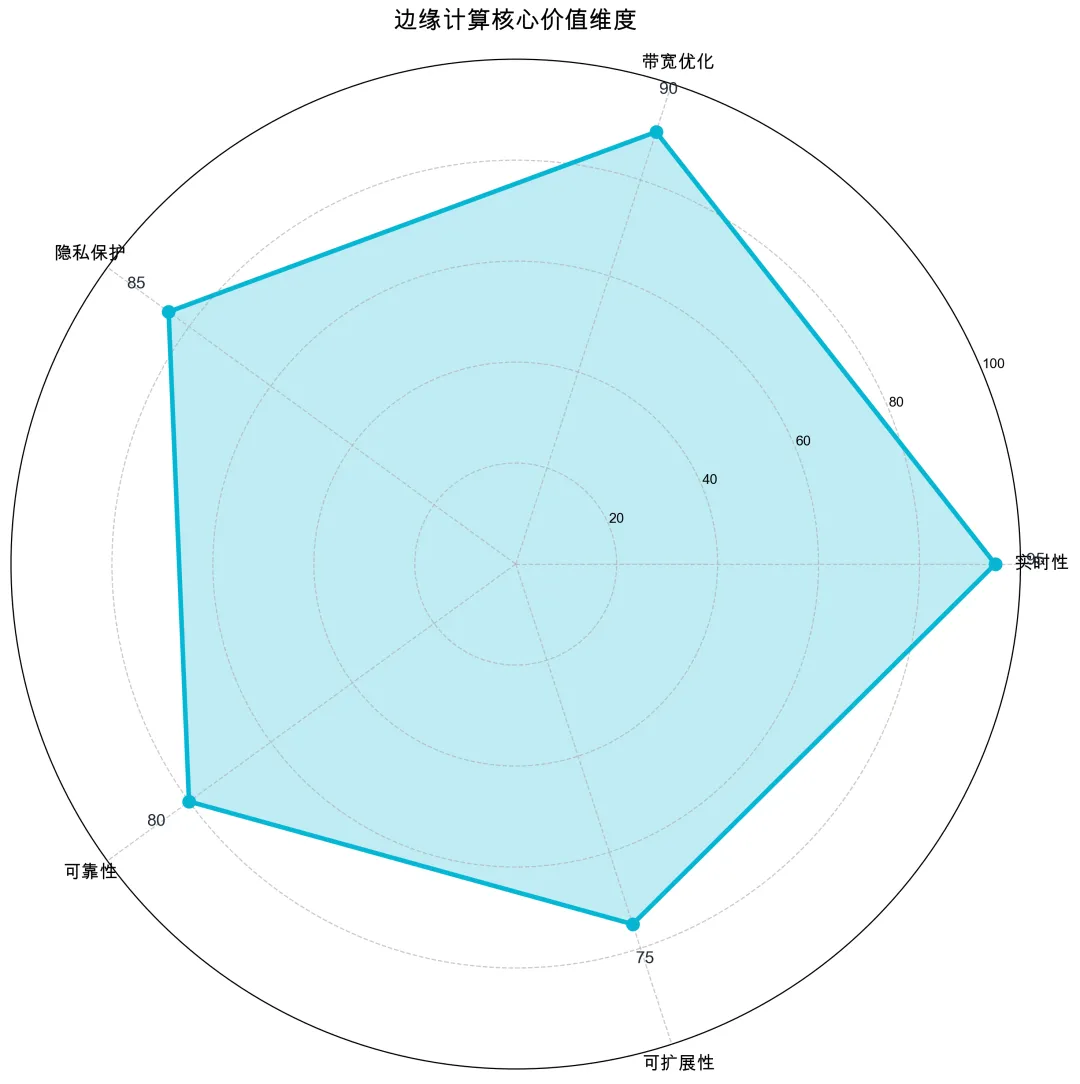
边缘计算能带来什么?
✅ 毫秒级响应——本地处理,不绕道云端
✅ 大幅省带宽——只传有价值的数据
✅ 隐私更安全——敏感数据不出本地
✅ 离线也能跑——断网也能正常工作
✅ 扩展更容易——需要算力就加设备
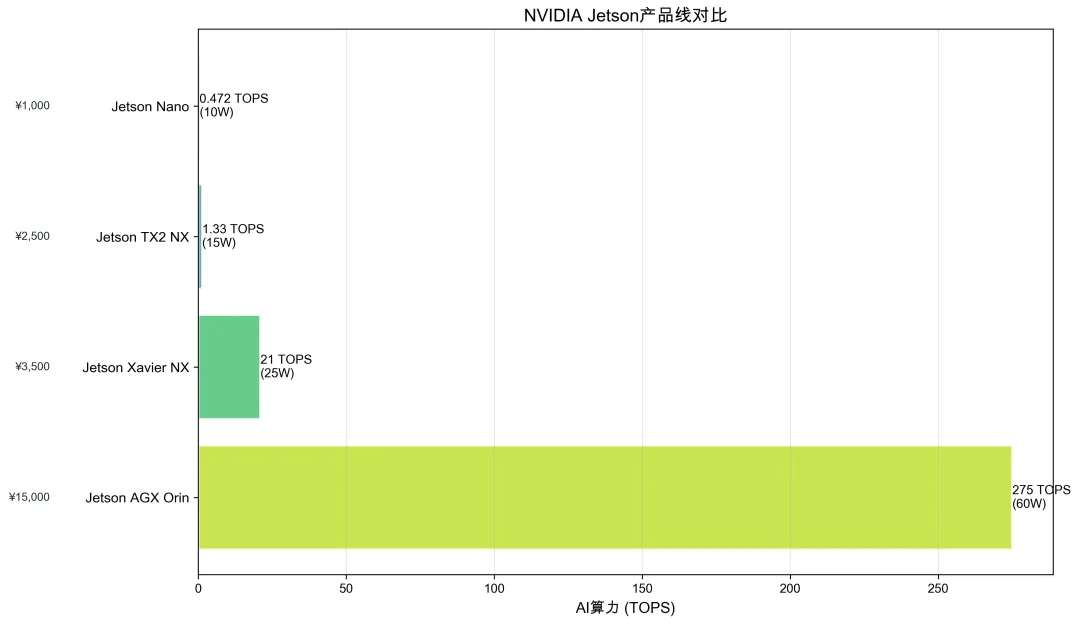
实战:怎么选硬件?
NVIDIA Jetson 家族对比
| Jetson Xavier NX | 21 TOPS | 25W | ¥3500+ | 安防监控、AGV |
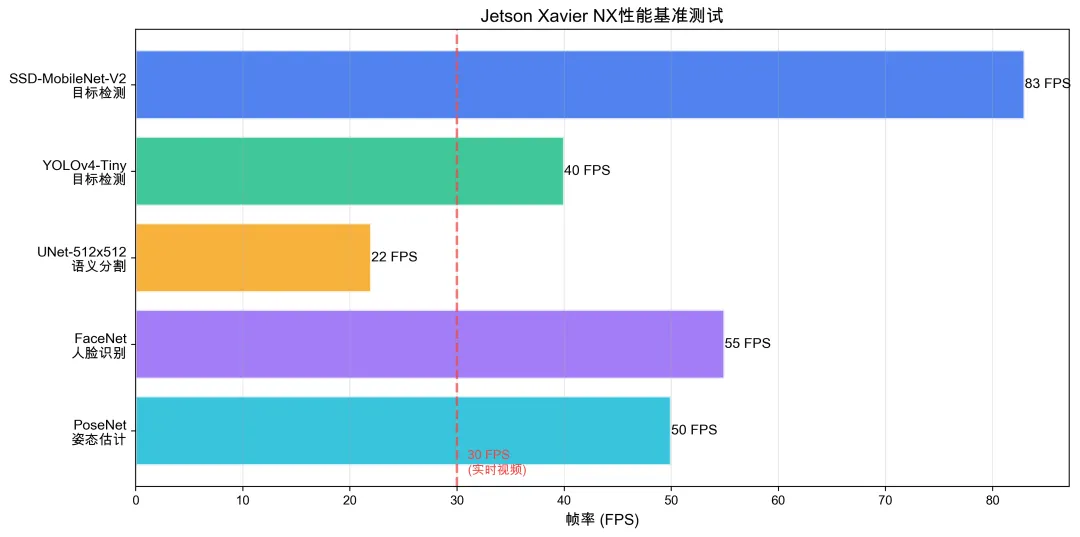
性能实测:Xavier NX 能跑多快?
| 83 | ||
| 55 | ||
| 50 | ||
| 40 | ||
| 22 |
结论:Xavier NX 是性价比最高的选择,大多数工业场景都能覆盖。
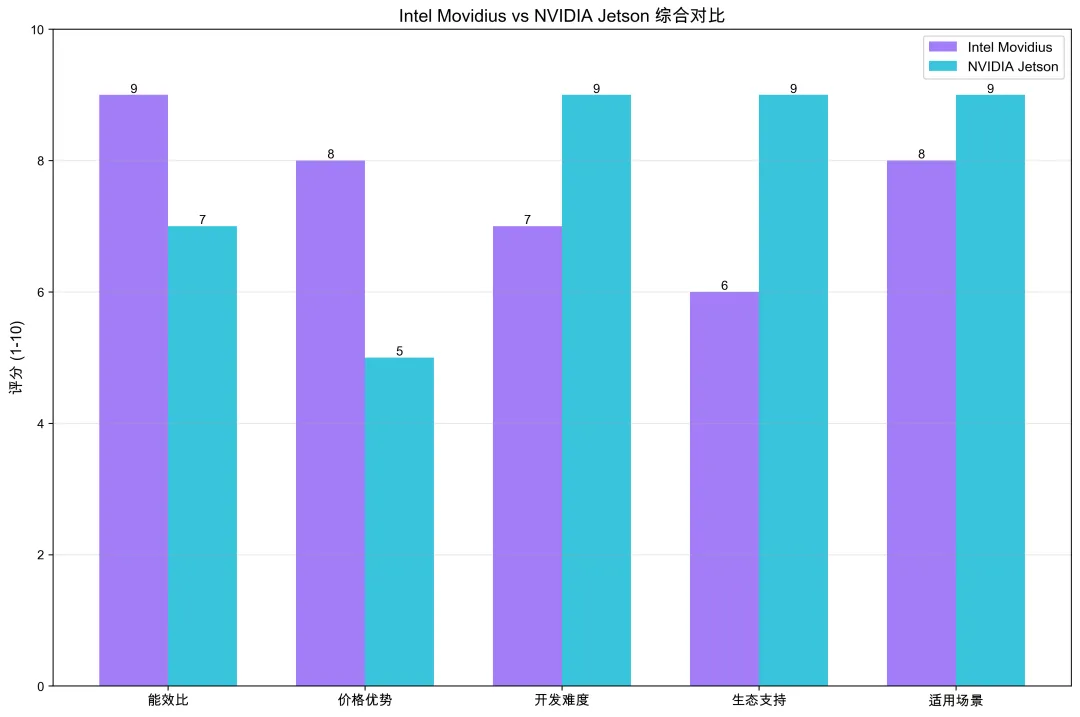
Intel Movidius vs NVIDIA Jetson
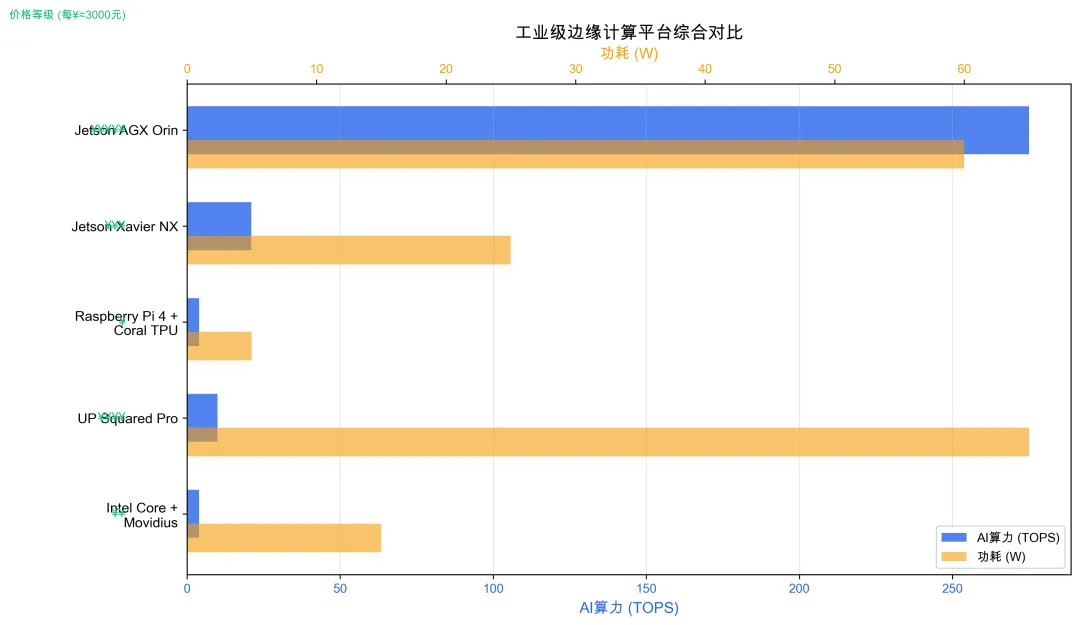
工业级平台对比
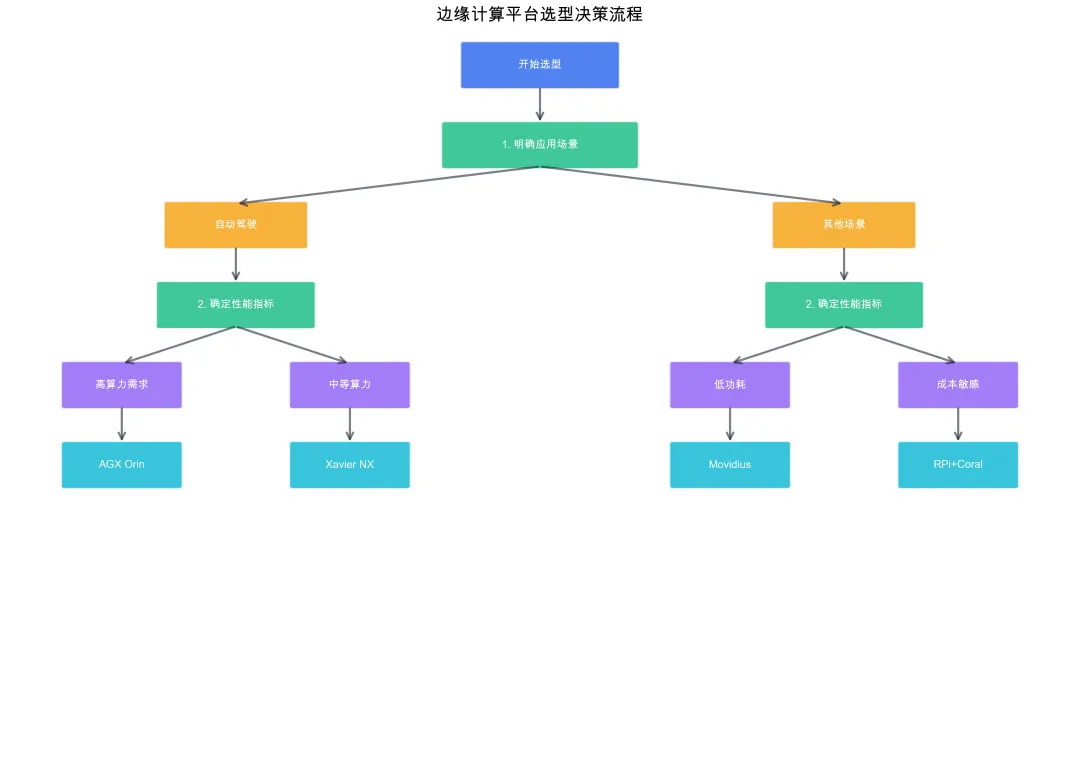
选型建议:按场景来
🚗 自动驾驶/ADAS
推荐:Jetson AGX Orin(275 TOPS)
需要处理多传感器融合 对实时性要求极高 预算充足
🏭 工业检测/安防监控
推荐:Jetson Xavier NX(21 TOPS)
算力够用,价格合理 支持多路视频分析 工业级宽温设计
🏠 智能家居/IoT设备
推荐:树莓派4 + Google Coral
超低功耗(<5W) 成本极低(¥800搞定) 适合小规模部署
避坑指南
❌ 只看算力,不看能效比→ 算力高不代表好,要看TOPS/W(每瓦算力)
❌ 忽视开发难度→ Jetson有完善的工具链,Movidius省电但开发难度大
❌ 不考虑环境→ 工业现场要看温度范围、抗振等级、防护等级
❌ 一次性大规模部署→ 先小规模测试,验证可行后再推广
总结
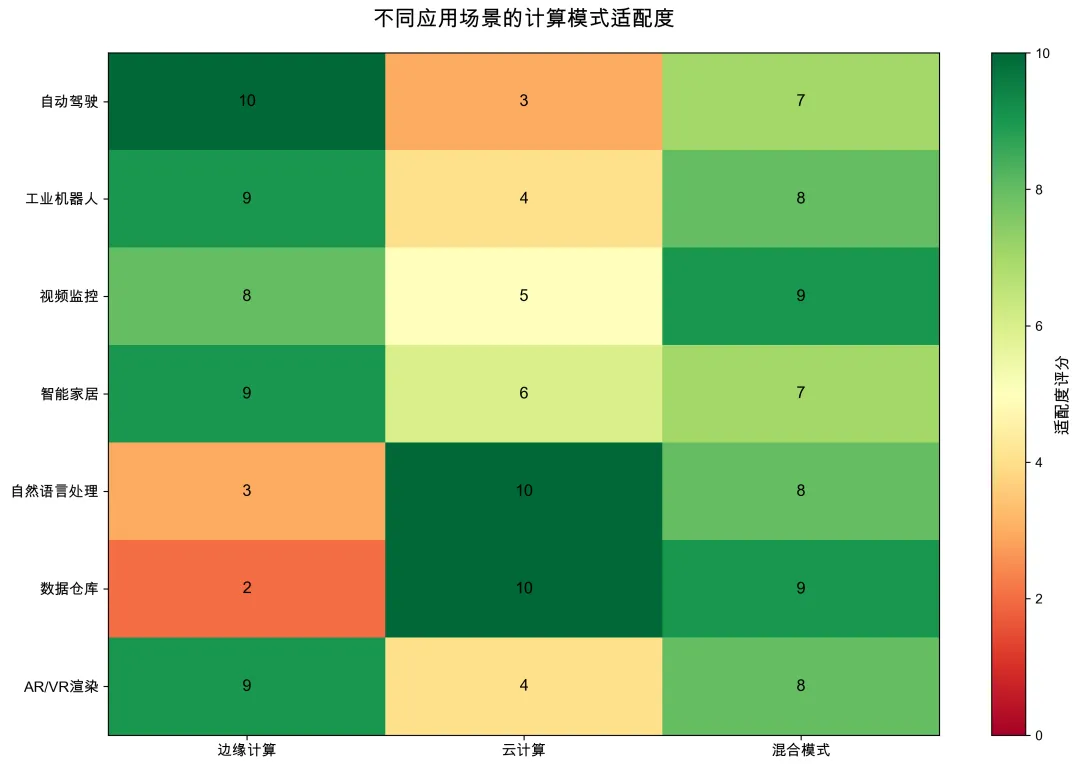
边缘计算不是取代云计算,而是和云计算协同工作:
边缘负责实时响应(毫秒级) 云端负责大数据分析(存储、训练)
选择平台时记住这几点:
- 先想清楚场景
——不是所有东西都需要边缘计算 - 算力够用就行
——不是越强越好,性价比最重要 - 生态很重要
——有成熟的工具链能省很多事 - 小步快跑
——先验证再上规模
相关阅读:
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 查扣一辆电动车,老百姓要亏多少钱?
- 新闻 | 电动汽车充电基础设施行业生态共建闭门座谈会:共探行业生态与高质量发展之路
- 与众08:将操控血脉融进SUV躯体!
- 自动驾驶车辆对路面设计的影响
- 电动汽车的5个高压安全设计原理
- 全尺寸SUV新王?奥迪Q9以超长轴距与多元布局,正面挑战德系双雄
- 2025自动驾驶开源项目红榜:9个高价值工程模板,跑通一个胜读十篇论文
- 每日资讯|中欧电动汽车案实现“软着陆”;加拿大总理卡尼将访华;财政部发文规范医疗保障基金会计核算;
- 预算20万买大六座SUV,这5款最值得关注!
- L3级自动驾驶来了 智能辅助驾驶≠自动驾驶 驾驶人错误使用“智能辅助驾驶”易生事故
