自动驾驶雷达干扰缓解:探索主动策略论文精读
C. Aydogdu et al., "Radar Interference Mitigation for Automated Driving: Exploring Proactive Strategies," in IEEE Signal Processing Magazine, vol. 37, no. 4, pp. 72-84, July 2020, doi: 10.1109/MSP.2020.2969319.
这篇文章的主线很清晰:车载FMCW雷达在密集交通环境中会互相“照射”,而且这种干扰往往远强于目标回波;传统“事后补救”的抗干扰方法在车联网高度动态场景里可能不够用,于是作者系统分析了干扰机理与概率,并提出三类更偏“事前设计/协同”的主动策略:准正交FMCW波形、基于低速通信的资源协调、以及RadCom/OFDM体制。
1. 问题图景:为什么车载雷达干扰会变成“硬问题”
文章开头强调一个现实趋势:ADAS/自动驾驶普及带来路网中雷达收发机数量激增,且大多无协同地发射,干扰事件将显著增加。作者明确本文聚焦FMCW(最常见、最鲁棒的车载雷达),并将干扰影响量化为概率、严重度、以及对检测/跟踪的具体后果(虚警、漏检、鬼影目标等)。
下面这张图给出了“互相照射”场景:多车同频段雷达工作,某车的回波链路是“两程”衰落,而别车的直达干扰是“一程”传播,天然就更强。
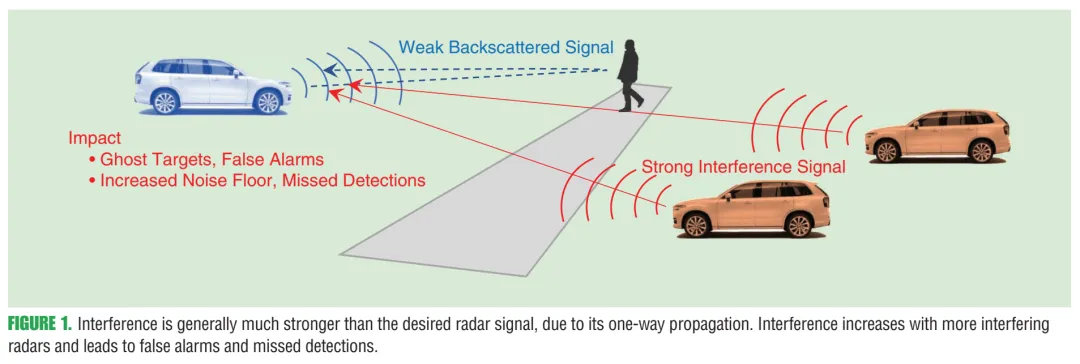
图1内容:多车雷达同时工作导致互扰;干扰路径多为雷达到雷达的直达链路(单程),而目标回波是雷达→目标→雷达(双程)。原文图注强调这是“radar interference problem illustration”。
2. FMCW体制与信号处理链:从发射到“距离-速度图”
文章用标准的K个线性调频chirp(sweep)描述FMCW发射信号。一个帧内K个chirp连续发射(此处作者假设无chirp间空闲,但也指出引入随机空闲可降低互扰概率)。
2.1 发射信号模型(式(1)(2))
帧信号写成
其中单个chirp
这里 为扫频带宽、 为chirp时长、 为载频、 为chirp斜率。
2.2 回波模型与“停-走假设”(式(3))
假设单个点目标,复信道增益 (包含路径损耗、天线增益、RCS等)、往返传播时延
归一化多普勒
则在 stop-and-hop 假设下第 个chirp的接收信号形式为
其中 是相对chirp起点的快时间, 为噪声。
2.3 图2:典型FMCW雷达收发链与处理流程(带“干扰插入点”)
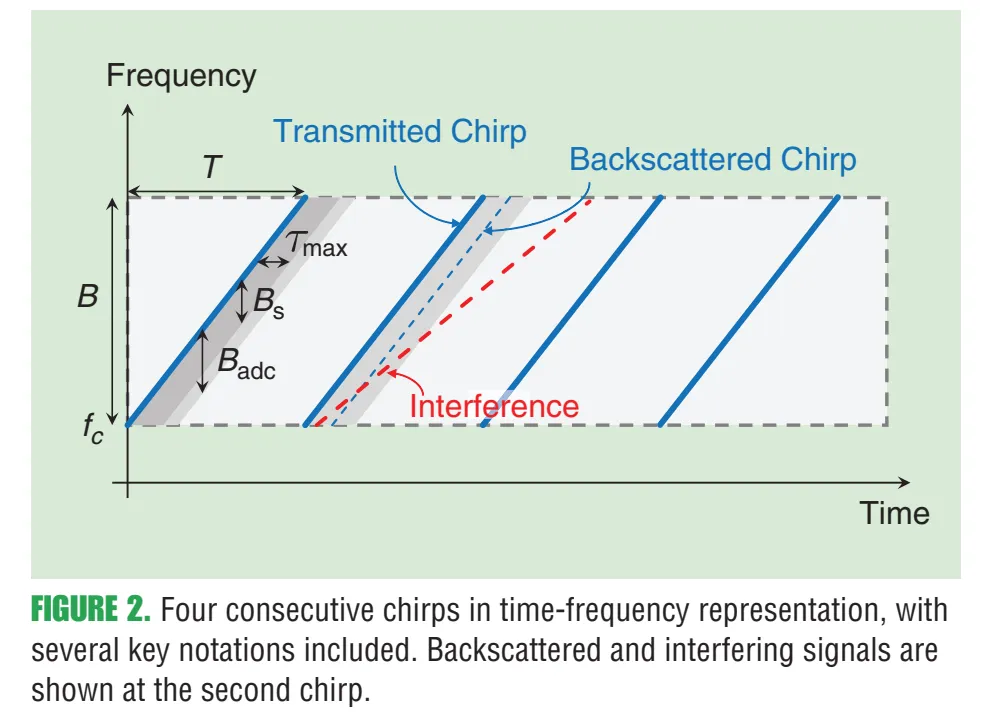
图2内容:从Tx基带→RF前端→接收端低噪放→混频“去chirp”(dechirp)→低通滤波→ADC→FFT/二维处理→检测/跟踪。图中还明确了干扰可能在混频后以“拍频/伪峰/噪底抬升”的方式进入后续处理链。原文图注为“FMCW radar signal processing chain”。
2.4 Stage 1:Dechirping 得到拍频信号(式(4)(5))
接收信号与本振(本机发射)做共轭混频(dechirp),并忽略在一个CPI内相位总进动很小的项后,作者给出拍频(中频)信号近似为
并对快时间采样 得到
这两式揭示:拍频里“距离项 ”与“多普勒项 ”发生耦合(),后面做二维匹配滤波/FFT时要处理这种range–Doppler coupling。
3. Delay–Doppler谱:二维匹配滤波(式(6))与分辨率
Stage 2中,作者把 做二维指数匹配(可视作二维DFT/periodogram),定义某个时延-多普勒点 上的delay–Doppler响应为
该谱在真实目标附近产生峰值,常配合CFAR做检测;峰值与处理增益 成正比。作者也指出其中的 是由FMCW固有的耦合引起的时延偏移,可在估计后补偿。
更关键的是,作者直接从式(6)给出FMCW的距离与速度分辨率(在 足够大时)
其中 为载波波长。直观解释:带宽越大→距离分辨率越高;CPI越长( 越大)→速度分辨率越高。
4. 干扰为何“天然更强”:Friis vs Radar Equation(式(7))
单链路下,作者用一个对比说明“为啥这事麻烦”: 目标回波受雷达方程(双程) 支配;而他车直达干扰受 Friis自由空间传播(单程) 支配,于是干扰功率远大于回波功率。
文中给出(符号按原文)回波与干扰功率的关系式(式(7)),核心结构是
因此在 与 同量级且 (RCS)取常见值时,通常 。
这也解释了后文为何把干扰影响拆成两部分:一是“强度”(功率),二是“相干性”(是否会像目标一样形成尖锐峰/鬼影)。
5. 频谱现象:chirp斜率失配、相位噪声与“鬼影/噪底抬升”
5.1 图3:chirp斜率失配导致干扰能量在距离谱里“铺开/挤压”
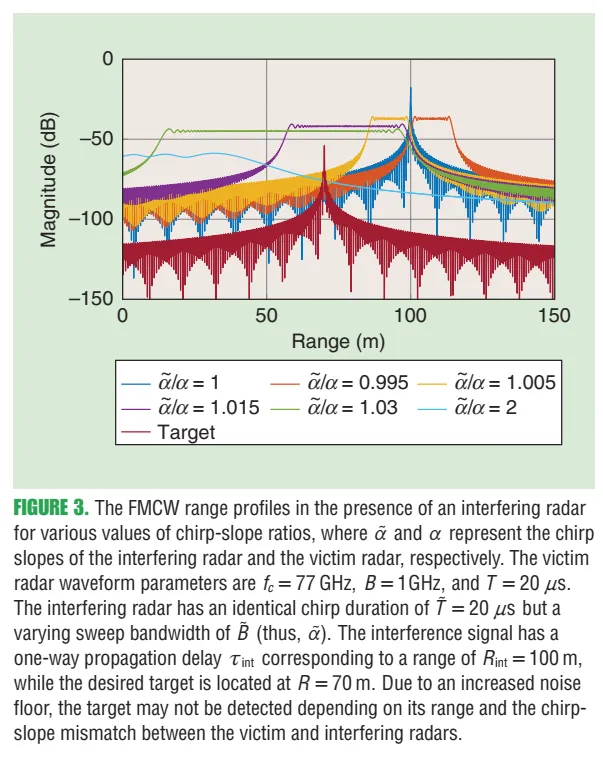
图3内容:受害雷达的距离谱在存在干扰雷达时,随斜率比 改变而出现明显差异:当斜率匹配程度不同,干扰在距离轴上的“形态”不同,可能形成局部峰值、也可能把噪底整体抬高,从而掩盖弱目标或引入虚假峰。原文说明参数如 GHz、GHz、 等,并强调干扰是单程传播而目标是双程传播。
5.2 图4:相位噪声造成谱展宽,细节丢失,弱目标更易被掩盖
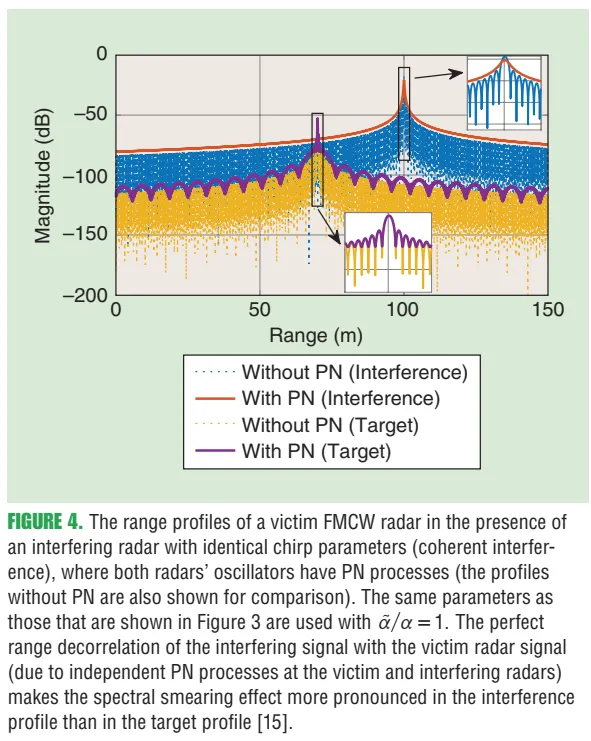
图4内容:考虑振荡器相位噪声(PN)后,无论目标回波还是干扰谱都会“涂抹/展宽”,但由于干扰更强,这种谱展宽会更显著地恶化检测性能,尤其会遮蔽弱目标。原文图注指出这里讨论“相干干扰”场景,并对比“有/无PN”两种情况。
6. 从单车到路网:随机几何下的网络干扰(图5、式(8)(9))
作者把道路上车辆位置抽象为随机点过程,用随机几何分析平均干扰。关键设定是:在多车道高速路上,每条车道的车辆(或雷达)沿道路方向形成一维Poisson点过程 ,强度 ( 是平均车距)。
图5:六车道高速路的网络干扰示意
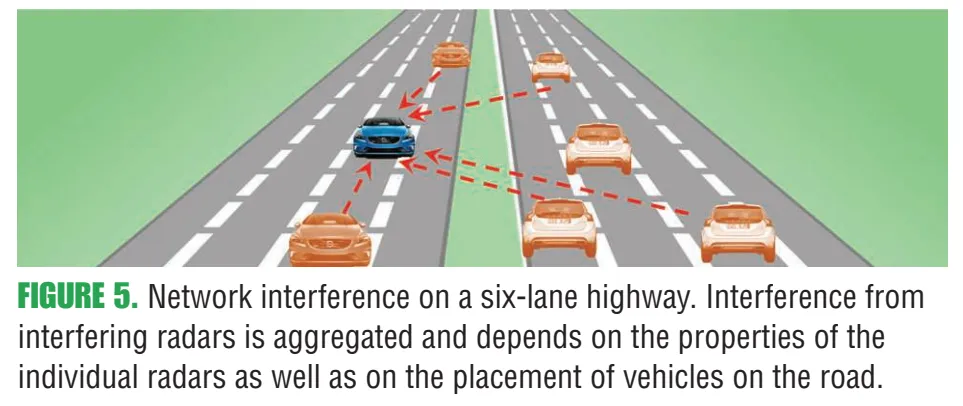
图5内容解读:受害车位于某条车道,周围多车道(对向、同向超车道等)车辆均可能形成干扰;作者将来自不同车道的干扰叠加,强调它与车辆空间分布、天线视场(FOV)等密切相关。
6.1 车道 的聚合干扰(式(8))
作者将某条车道 上所有干扰车的贡献累加,写成(结构上是“点过程求和”)
其中 是从受害车到位置 的干扰车的距离, 是“发生干扰的概率/占空相关因子”(后面会精确解释),并且天线/FOV通过积分下限或增益项进入。
6.2 期望干扰(式(9))的连续化积分形式
对Poisson点过程用平均化(本质上是Campbell定理),作者把干扰期望写成积分形式,并得到与 (平均车距)成反比的趋势项。文中给出一个代表性化简结果(展示“车越密→干扰越大”的量化规律):
这里 是车道间距, 与FOV有关,积分下限体现“视场外不计入干扰”。
7. 图6:网络干扰如何抬升噪底并压垮SINR
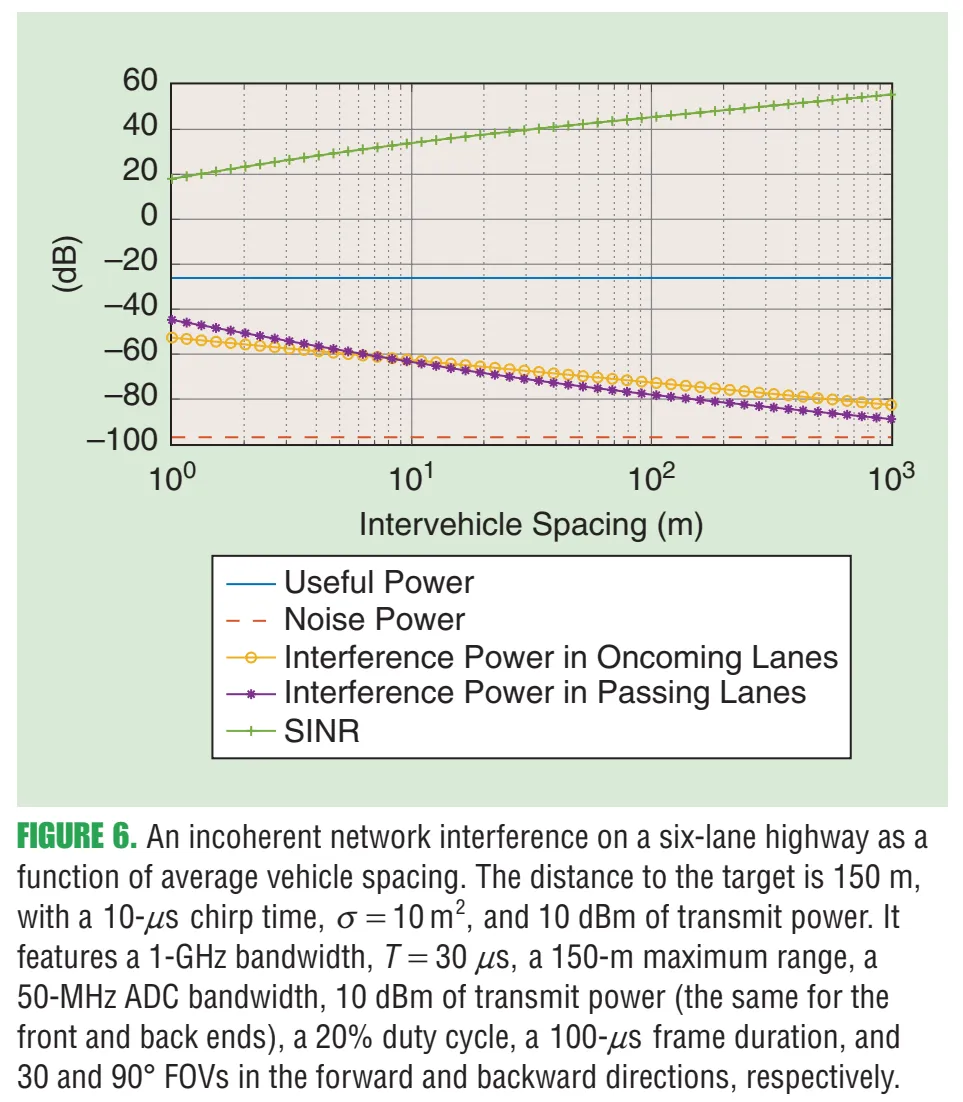
图6内容:横轴是平均车距(越小表示越拥挤),纵轴展示 useful power、noise power、来自对向车道/超车车道的干扰功率,以及合成后的SINR。随着车距减小,干扰项迅速上升,SINR大幅下降;作者还给出实验/仿真设定,例如目标距离150 m、带宽1 GHz、占空20%、不同FOV等。
这张图把“网络层面”的结论说得很直白:即便是非相干干扰,也能把噪底抬升“几十dB”量级,从而让弱目标(行人/自行车等低RCS)更难检测。
8. 把影响压成一个“可设计的指标”:SIR表达式(式(10)(11))
作者用一种工程上非常好用的方式,把目标峰值(有用)与干扰功率写成
其中 描述干扰与处理增益的耦合(相干程度不同, 取值区间不同)。
进而得到SIR(式(11))的分解形式:
(原文把“不可控因素”和“可控因素”分开强调:第一因子多由场景决定,第二因子可通过占空比、chirp斜率、FOV、处理增益等优化,使SIR远大于1。)
这里已经埋下后文三种主动策略的逻辑:降低 、降低有效斜率 或通过资源分离让“相干叠加”变得不可能,同时保持足够的距离/速度分辨率。
9. 主动策略一:准正交FMCW波形(图7、式(12)及其后推导)
作者从前面的分析得到一个干净的比例关系:干扰与
相关( 为占空比, 为最大往返时延),因此 降低chirp斜率 (等价于延长chirp)能显著降低干扰。
9.1 两个错位chirp的耦合(式(12))
考虑一个chirp 与时间错位 的chirp (并以周期 重复),它们的功率泄漏/耦合(本质上是相关积分):
并指出由于瞬时频差约为 ,所以这种耦合像“两正弦频差”的互相关一样迅速衰减,从而称这些波形为准正交。
9.2 图7:单慢扫频(slow-sweep) FMCW实现“很多近似正交信号”
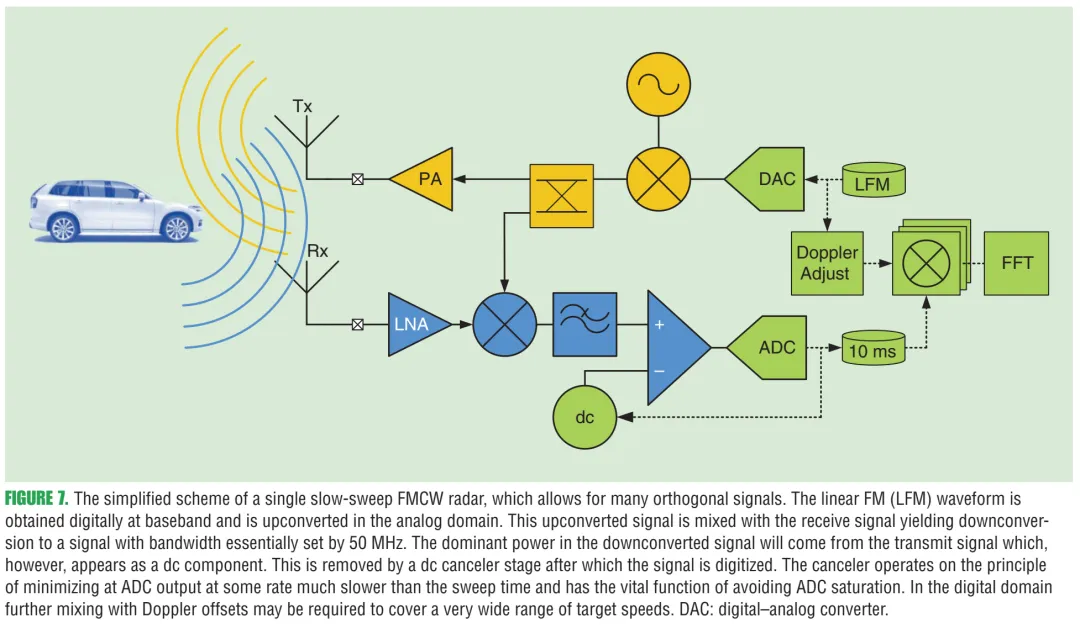
图7内容:这是一个“把慢扫频FMCW落地到硬件链路”的简化方案。LFM基带可数字生成,上变频后发射;接收端下变频得到基带后以约50 MHz带宽采样;强泄漏在数字域表现为直流分量,通过“dc消除/反馈抵消”而非极低截止频率的模拟高通来处理;同时允许在数字域做相位偏置(Doppler adjust)以改变不模糊速度范围。原文图注强调该方案“允许许多正交信号”,并解释了DAC/ADC/直流消除等关键模块。
9.3 “长chirp”下的速度-距离解耦(式(13)(14)的意义)
作者指出式(5)里把速度当作简单多普勒近似会忽略小项,但在长chirp下必须保留,从而可在单chirp内解决range-speed ambiguity。文中写出更严格的形式(结构上是“相位含二次项的积分”)并用频域峰值与相位单调性做数值反演来求速度。
10. 主动策略二:借助低速通信做“频时资源协调”(图8、图9)
这部分作者把雷达当作“可被调度的发射机”,通过低速通信在车与车之间交换起始时间/频带等信息,使雷达在频时资源上尽量正交。文章提到可以用专用通信或蜂窝V2X,甚至把雷达与通信融合成RadCom单元。
10.1 图8:RCU的频时共享与冲突消解机制
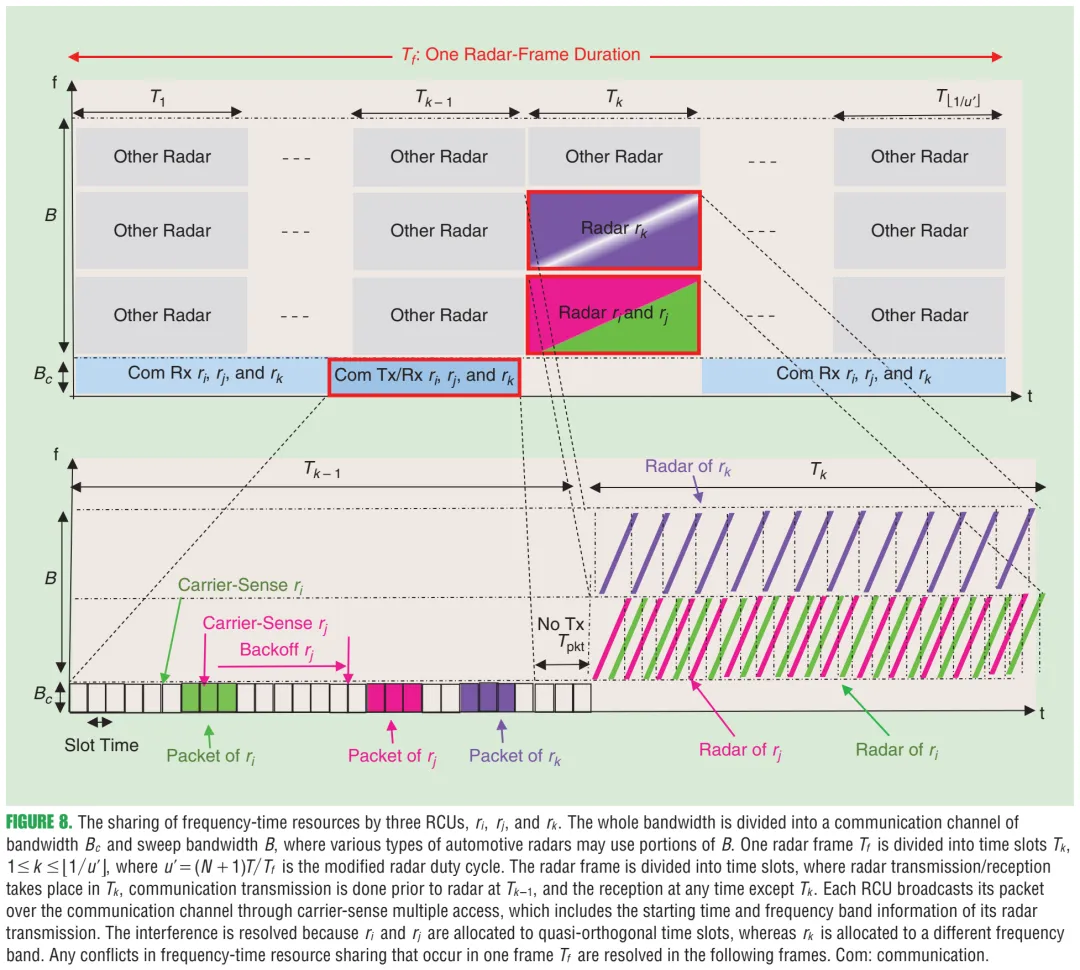
图8内容解读:上半部分展示一个雷达帧 被切成时间槽,车载RCU在通信带宽 上广播自己的“雷达资源占用”,从而把不同车辆的雷达chirp安排到准正交的时间槽;若某车被分配到不同频带,则通过频分避免冲突。下半部分展示载波侦听/退避的通信过程与“下一帧再消解冲突”的思想。原文图注还解释了 三个RCU:前两者用准正交时间槽,第三者换频带,且帧内冲突可在后续帧消解。
10.2 图9:协调前后干扰概率 的数量级差异
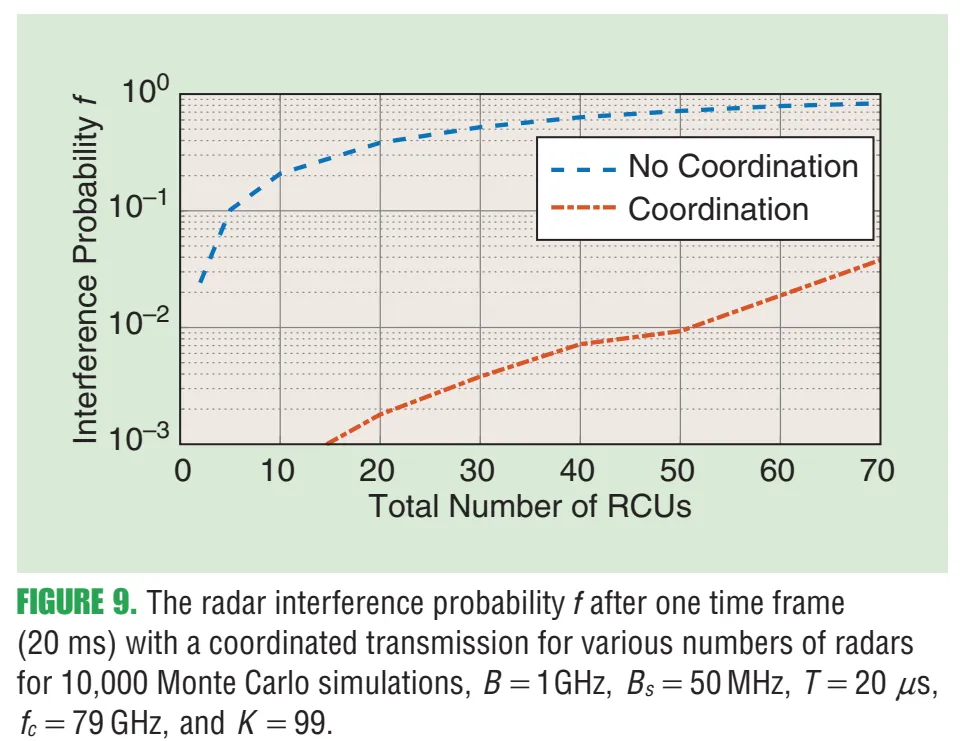
图9内容解读:横轴为RCU(雷达/通信单元)数量,纵轴为干扰概率 (对Monte Carlo取期望意义)。图中“Coordination”曲线显著低于“No Coordination”,说明只要能在几十毫秒级做资源分配更新,干扰概率能大幅降低。原文图注给出仿真条件:一个帧20 ms、1 GHz带宽、 MHz、 ns、 GHz、、10,000次Monte Carlo等。
11. 主动策略三:RadCom / OFDM,尤其是“跳频的 stepped-frequency OFDM”(图10、式(15)、图11)
作者指出OFDM作为通信主力波形,天然适合做“雷达+通信”融合(RadCom)。难点在于常规OFDM雷达受ADC带宽限制,分辨率不如宽带FMCW;解决思路是用stepped-frequency OFDM:连续OFDM帧在不同载频上发射,拼接成更大的总带宽,同时每帧仍保持较小的基带带宽,从而降低ADC速率。
11.1 图10:时间-频率资源协调示意(stepped vs narrow-band)
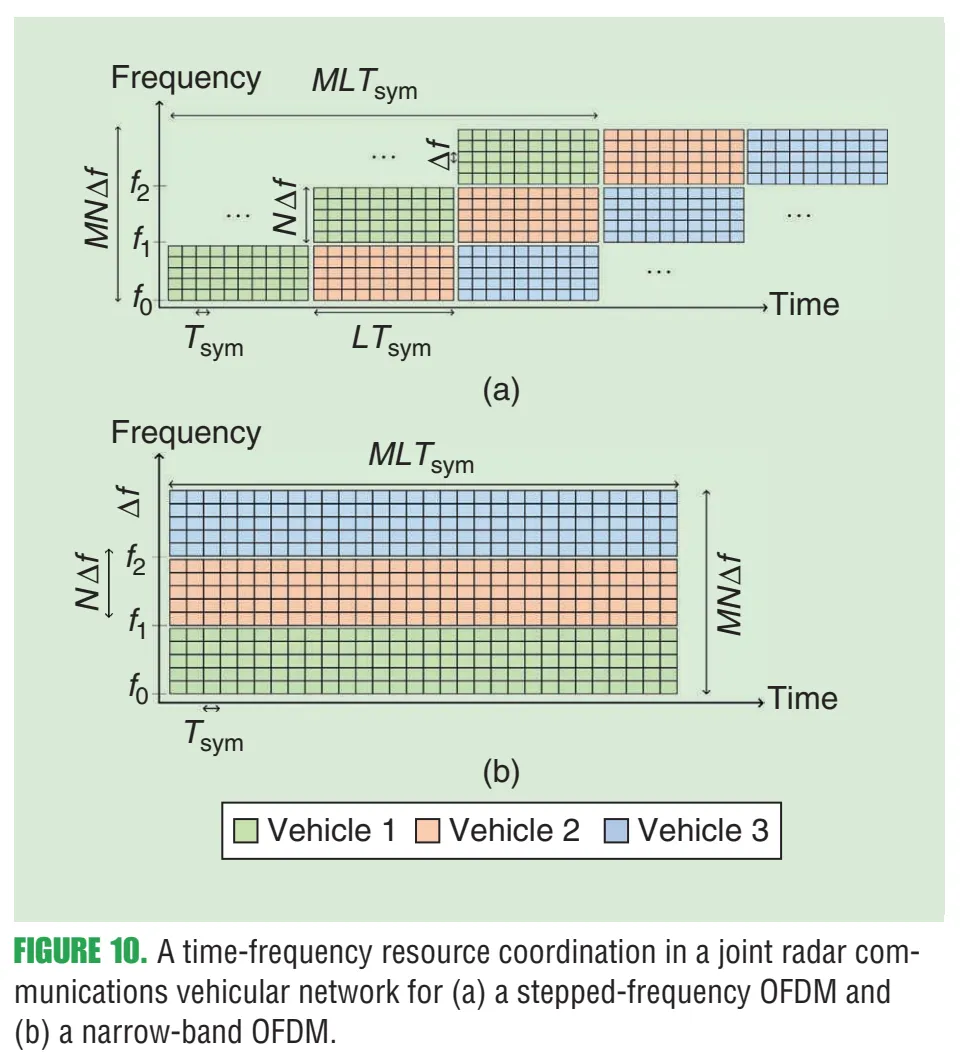
图10内容解读:图10(a)显示stepped-frequency OFDM:不同车辆被分配到互不重叠的时频块(不同载频/不同时间段),每个车辆通过跨M个载频帧的联合处理获得总带宽 的高距离分辨率;图10(b)为窄带OFDM的资源分配。原文图注明确这是“time-frequency resource coordination in a joint radar communications vehicular network”。
11.2 OFDM回波数据立方体模型(式(15))
在“循环前缀长于时延、且小多普勒近似”等标准假设下,作者给出第 帧、第 个符号、第 个子载波上的接收符号模型
其中 是发射数据/导频符号, 为噪声。作者随后说明:对 维做匹配滤波可估计时延,对 维处理可估计多普勒;跳频带来delay–Doppler耦合,可通过DFT实现里的相位校正项消除。
11.3 图11:三种OFDM方案下“可容纳车辆数”的对比
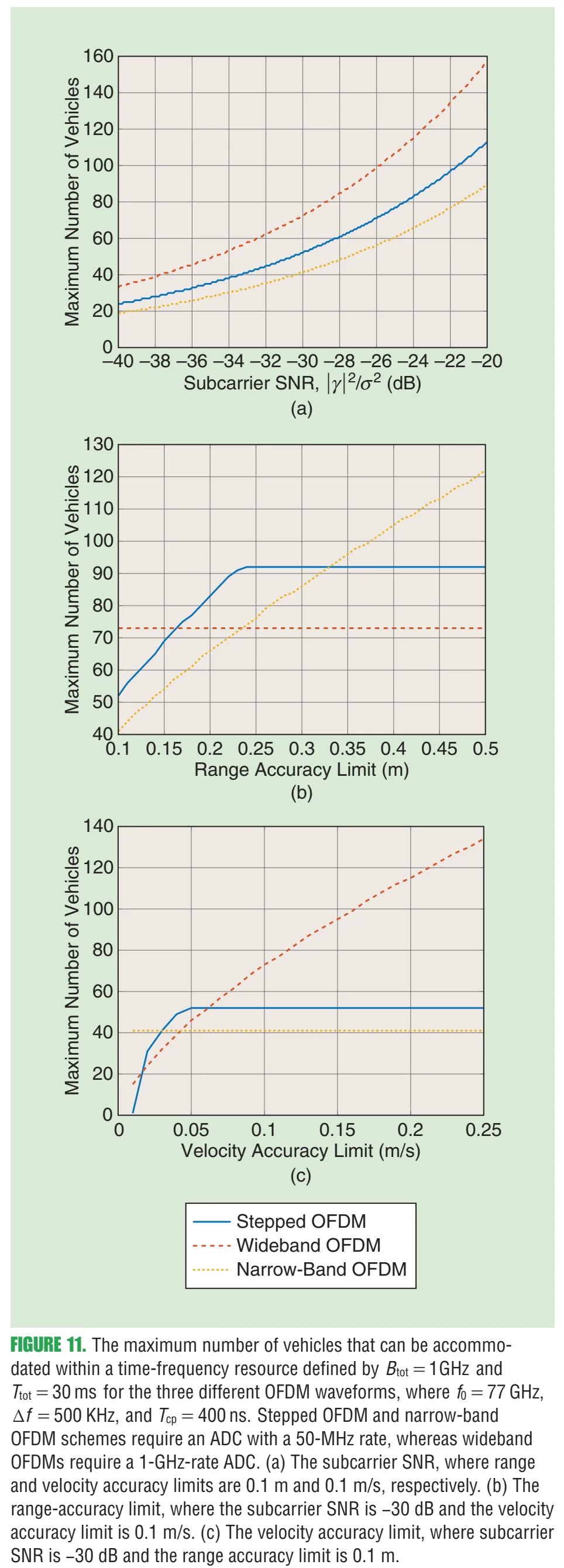
图11内容:给定总资源 GHz 与 ms,比较 stepped-frequency、窄带、宽带OFDM三种方案可支持的车辆数;stepped-frequency在相同ADC(50 MHz)硬件约束下,通过“跳频换距离精度、牺牲部分多普勒精度”的灵活权衡,往往能塞进更多车辆。原文图注还说明宽带OFDM需要1 GHz采样率ADC,且(a)(b)(c)分别在不同精度/SNR约束下比较。
12. 图12:验证平台与实验环境
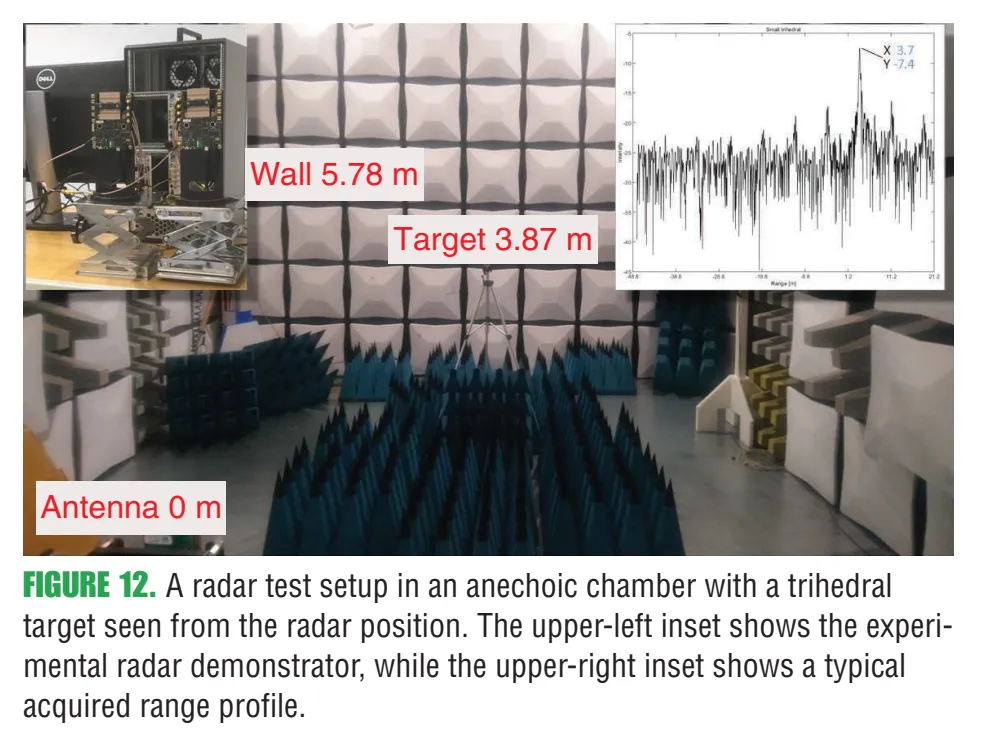
图12内容:作者 计划 搭建包含毫米波前端、高速数字信号生成与采集、以及可控“独立干扰源”的演示平台,并在更真实环境里验证前文关于干扰概率、SINR、以及slow-ramp测速方法的理论分析。图中展示暗室(anechoic chamber)内的壁面与目标位置标注、以及典型距离谱插图。
附录:关键推导
A.1 从chirp模型推到拍频与“距离-速度耦合”(式(4)(5)的展开)
发射chirp:
单目标回波(忽略幅度常数,保留时延与多普勒)可写成
dechirp就是与本机chirp共轭相乘:
把 的相位展开:
把常数相位合并到 中(或写成 的形式),于是
再把 与 合并,就得到原文式(4)的“拍频指数项”结构:
对应采样 直接得
与原文式(4)(5)同型。
这里的关键点是:在单个chirp内,快时间频率项是 ,所以距离与速度混在一起;必须通过跨chirp的慢时间维度( 维)来把 单独拉出来。
A.2 从二维periodogram推分辨率:为什么 ,
式(6)本质是对二维复指数的匹配滤波/DFT:
把无噪单目标的 代入:
两项都是有限长度几何级数,其幅度包络是Dirichlet核;主瓣零点间隔由指数“频率”的分辨力决定。
距离(时延)分辨率来自第二项对 的敏感度。令
当 已靠近 (或把耦合补偿后),主瓣主要由 决定。第二项主瓣宽度满足
又因为快时间观测长度 ,且 ,得
换成距离 ,于是
即原文给出的 。
速度(多普勒)分辨率来自第一项对 的敏感度。其主瓣宽度满足
将 ,得
原文写成 的等价形式,是因为在很多雷达教材里用 ,两者只差“用 还是用 ”的记号。
A.3 “干扰概率因子” 的来源:为什么它会与占空比/ADC带宽/斜率相关(通向式(11))
在FMCW里,干扰并非总是“全时全频”落在受害雷达的有效拍频带内。作者在式(11)前的推导把“会造成有效干扰的时间/频率重叠比例”压成一个概率因子 ,并强调可通过设计减小它。
一个常见推导思路(与文中“干扰与 等成比例”的结论一致)如下:
dechirp后,来自干扰雷达的拍频会出现在受害雷达的低通+ADC带宽 内,条件近似可写成
当车辆位置/起始时间随机时, 在 的有效范围内变化(),而拍频随 的变化率就是斜率 。因此“落入带宽窗”的概率量级
具体系数与精确假设有关,但依赖关系与作者在准正交部分写的
一致(这里 对应最大往返时延)。
这也解释了三种主动策略分别在“降低有效斜率/延长chirp”“降低重叠概率(调度)”“把资源做成严格正交(OFDM时频分配)”三个方向发力。
A.4 从点过程求和到积分期望:式(8)→式(9)的详细一步
式(8)是车道 上Poisson点过程 的求和形式。 为了求其期望,用Campbell定理:
其中 。
把 代入,得到
几何关系:若车道中心线与受害车道相距 ,且把沿道路方向的坐标写成 ,则
同时,由FOV限制(只有进入视场的干扰才算),积分下限从某个 (半视场角)开始。用 (即 )变换,,并且
于是
将 代回,就得到式(9)那种“与 、、 成简单比例”的结果形态(文中给的是同类化简表达式,并强调小 处需要安全边界避免奇异)。
A.5 从式(10)到式(11):把“可设计量”显式拆出来
式(10)给出
于是
接下来用“目标回波由雷达方程决定、干扰由Friis决定”的功率比(式(7))把 替换成与 有关的比例,再把 展开成与占空比 、斜率 、ADC带宽 、以及FOV(通过发生重叠的概率)相关的因子,就得到式(11)那种“第一因子不可控、第二因子可控”的结构。作者在正文里直接强调可控项包括:小占空比、小斜率(或小 比例)、缩小FOV以减小 、以及增大有效处理增益 。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
