代码的消亡:FSD v13证明了,自动驾驶的终局不是写规则,而是喂数据
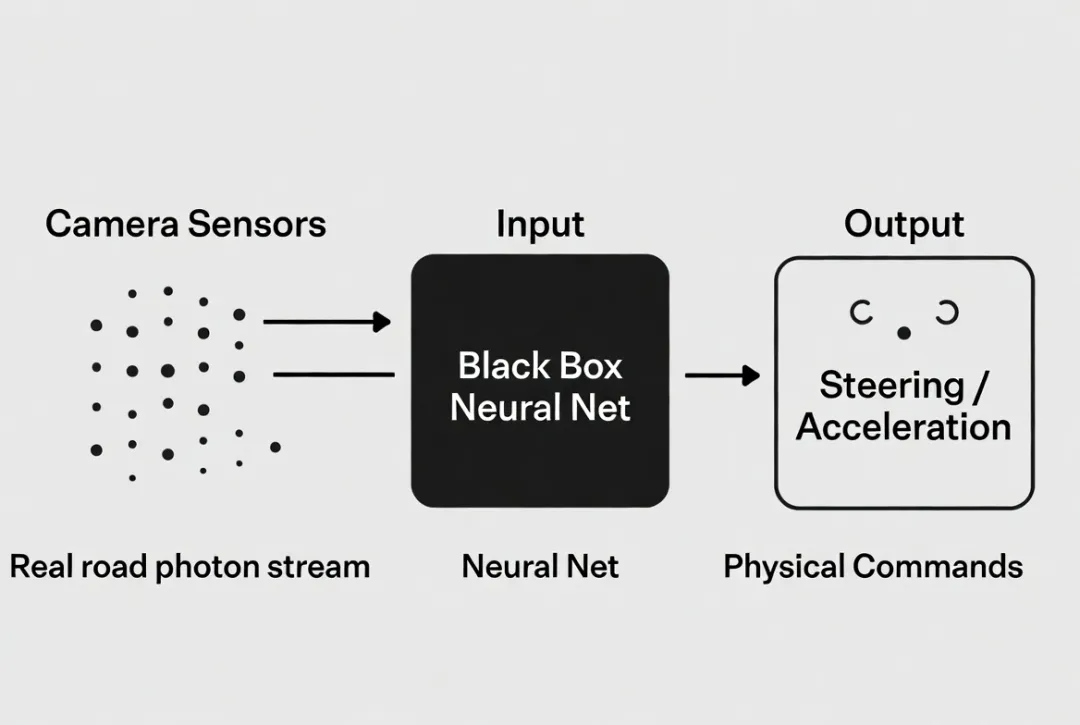
在自动驾驶行业长达十年的发展历程中,技术路线之争一直被简化为激光雷达与纯视觉的传感器之争。然而FSD v13的落地揭示了更深层维度的冲突,即基于规则的模块化架构与端到端神经网络架构的决战。长期以来,Waymo、Cruise以及大多数传统主机厂遵循的是经典的机器人学范式,即感知、定位、预测、决策、规划、控制。这每一个环节都由独立的代码模块负责,工程师们试图用海量的条件判断,依据未来道路上可能发生的一切状况。这种堆砌代码的方式在L2级辅助驾驶阶段行之有效,但面对L4级以上所要求的无限长尾场景,这种方式遭遇了难以逾越的边际效用递减墙。在这种架构下,摄像头捕获的光子信息直接输入神经网络,而网络输出的直接是车辆的转向、加速和制动指令。v13最关键的突破在于,自身终于完成了城市道路栈与高速公路栈的架构统一。在v12时代,车辆驶入高速公路时仍会切换回基于传统启发式代码的旧堆栈,而v13将这一最后的规则堡垒攻破。车辆之所以知道如何处理复杂的高速合流、匝道变道或应对激进的加塞,不再是因为工程师写了相应的几何计算代码,而是因为它观看了数百万小时的真实道路驾驶视频,通过模仿学习掌握了其中的概率分布规律。这种转变意味着自动驾驶的迭代逻辑发生了质变,修复一个错误不再是修改一行代码,而是筛选出更多包含该错误场景的高质量数据,投喂给模型进行针对性训练。从商业竞争的角度来看,这一技术路线的切换构建了极高的准入门槛,也就是算力霸权与数据围栏。在规则驱动时代,一家初创公司只要拥有一支优秀的算法团队,依然有机会在细分场景下通过精妙的逻辑设计获得立足之地。但在数据驱动时代,入场券变成了极其昂贵的算力基础设施。特斯拉之所以能推动FSD v13的进化,是因为其背后支撑着位于德克萨斯州超级工厂的Cortex超级计算机集群,以及由数万张H100和H200芯片组成的庞大训练网络。根据2026年的产业观察,特斯拉在人工智能算力基础设施上的资本开支已达到惊人的量级。对于大多数竞争对手而言,这已经不再是软件工程能力的较量,而是资本开支能力的军备竞赛。没有E级以上的算力储备,任何关于端到端自动驾驶的商业计划书都面临着无法验证的风险。此外,FSD v13的泛化能力标志着高精地图路线的终结。高精地图本质上是将物理世界的规则固化在云端,这一模式依旧是规则思维的产物。在城市道路环境日益复杂的今天,维护鲜度极高的高精地图不仅成本高昂,而且在突发施工或临时改道等场景下显得极其脆弱。v13展示了令人印象深刻的适应性,该架构能像真人驾驶人一样,仅凭视觉信息,在从未涉足的陌生道路上进行导航。这意味着自动驾驶的扩展不再受制于地图测绘队的脚步,其边际部署成本呈指数级下降。对于那些重资产投入地图测绘的图商和依赖地图的车企来说,这无疑是一次资产价值的重估打击。然而这种黑盒化的端到端模型也带来了前所未有的安全监管挑战,这构成了FSD v13向受监督自动驾驶乃至无人驾驶迈进过程中的最大灰犀牛。在规则代码时代,当事故发生时,调查人员可以回溯日志,精准定位是哪一行代码的逻辑判断失误。但在神经网络时代,数亿个参数的权重调整导致了决策过程的不可解释性。当车辆出现危险行为时,工程师无法直接解释为什么,只能通过增加反例数据来试图修正概率。这种不可解释性与当前全球基于功能安全ISO26262标准的监管体系存在根本性冲突。欧洲监管机构虽然已开始与特斯拉就FSD的落地进行接触,并在2026年初释放了积极信号,但监管机构要求的是确定的安全边界,而概率模型提供的是统计学上的安全优势。这种认知错位将是未来几年制约端到端自动驾驶技术在全球商业化落地的核心博弈点。传统的自动驾驶控制算法工程师、规划算法工程师的岗位需求正在发生结构性变化,取而代之的是数据闭环工程师、大模型训练专家和算力运维人员。产业链的价值重心从软件开发商向算力芯片供应商如英伟达、云服务提供商和拥有海量车队的数据拥有者转移。未来的自动驾驶公司,本质上将演变为一家拥有车队终端的人工智能算力公司。更深远的危机在于,FSD v13证明了机器智能的涌现并不依赖于人工研发者对物理规则的显性理解。车辆学会了摩擦力控制,学会了博弈论,学会了礼让行人,却不需要理解牛顿定律或社会契约。这暗示着在未来的物理世界自动化进程中,研发者引以为傲的逻辑概括能力可能不再是必须的。只要有足够的数据和算力,机器可以通过暴力美学直接逼近真理。FSD v13不仅仅是特斯拉的一个软件版本号,更是自动驾驶行业从代码时代迈向数据时代的里程碑。这场变革虽然激进,但符合技术演进的最优路径,即用硅基侧的暴力计算,去解构碳基的复杂世界。文章关键词:FSD v13,端到端自动驾驶,神经网络,算力军备竞赛,Cortex集群,黑盒模型,数据驱动,特斯拉,人工智能监管,不可解释性想看更多硬核商业评论,可以点个关注。下一篇更精彩。



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
