辞旧迎新,知识续航!「龙哥读论文」陪你跨年,知识星球会员优惠券限时限量放送!🐉 「龙哥读论文」知识星球:让你看论文像刷视频一样简单!公众号每日8篇拆解不够看?星球无上限更AI领域论文、资讯、招聘、招博、开源代码,一站式干货,每日2分钟刷完即赚!👇扫码加入「龙哥读论文」知识星球,领取优惠,前沿干货、实用资源一站式拿捏~

龙哥推荐理由:
想象一下,未来的自动驾驶汽车不仅能安全行驶,还能根据你的喜好“飙车”或“佛系”驾驶。这篇来自清华等机构的论文,提出了一个名为SDD Planner的扩散模型框架,巧妙地将安全约束与个性化驾驶风格动态融合,在权威测试中全面领先,并完成了实车验证。它为解决自动驾驶规划中“千人一面”的难题提供了一个极具潜力的方案,无论是学术创新还是工程落地都值得关注。
原论文信息如下:
论文标题:
Safe and Stylized Trajectory Planning for Autonomous Driving via Diffusion Model
发表日期:
2026年02月
发表单位:
清华大学等(根据作者单位推断)
原文链接:
https://arxiv.org/pdf/2602.04329v1.pdf
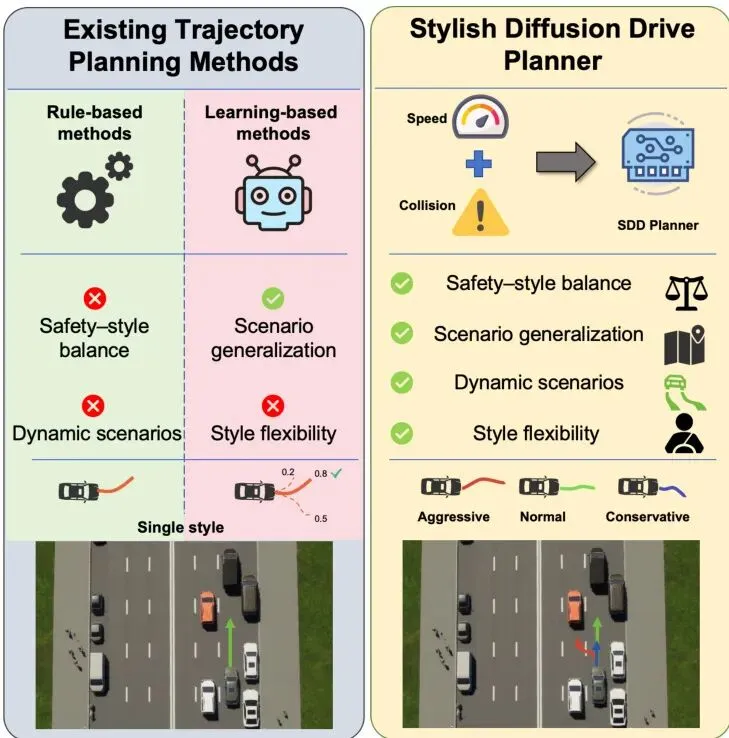
欢迎回到“龙哥读论文”!上次我们聊到“未来自动驾驶能像老司机一样开车吗?”,很多龙迷留言表示既期待又担心:期待的是个性化体验,担心的是安全。今天这篇来自清华等机构的论文,直接捅破了这层窗户纸。它提出的SDD Planner,名字听起来有点酷,全称是 Stylish Diffusion Drive Planner,直译过来就是“时尚扩散驾驶规划器”。简单说,它想让自动驾驶汽车学会“察言观色”和“随机应变”:既能满足你“飙车”或“佛系”的驾驶偏好,又能根据路况实时调整安全策略,绝不拿生命开玩笑。🤨图1:不同轨迹规划范式的比较。这张图清晰地展示了现有方法的痛点:要么为了安全牺牲风格(过于保守),要么为了风格忽视安全(过于激进),很难达到理想的平衡点。而SDD Planner的目标就是生成接近这个理想点的、用户偏好多风格轨迹。那么问题来了,它怎么做到的呢?我们这就一层层剥开看看。驾驶风格与安全如何兼得?SDD Planner给出新答案
自动驾驶规划(Trajectory Planning)好比汽车的“大脑”,负责在复杂的路况下,规划出一条从A点到B点的行驶路线。传统方法要么太“死板”(规则驱动),要么太“黑盒”(端到端学习),很难让用户自己选择是“舒马赫模式”还是“安全第一模式”。近几年,扩散模型(Diffusion Model)在生成领域大放异彩。它本质上是一个“去噪”大师:先给一张干净图片(或一条合理轨迹)不断加噪声,直到变成一团乱码;然后再训练一个模型,学会从这团乱码中一步步还原出原图。这个过程天然适合生成多样化的结果,正好契合驾驶场景中“条条大路通罗马”的特性。SDD Planner的核心思想就是:用扩散模型作为轨迹生成的基础骨架,然后用两个“智能模块”为这个骨架注入“灵魂”,一个负责理解场景和你的风格偏好,另一个负责在生成过程中动态协调安全和风格。核心揭秘:动态注意力与引导的扩散模型
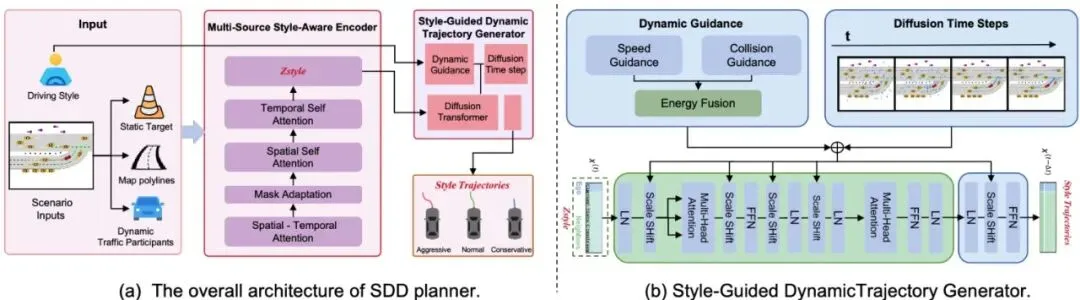
我们先来看SDD Planner的全貌,它的设计非常清晰。图2:SDD Planner整体架构。(a) 多源风格感知编码器将各种输入编码成风格化特征。(b) 风格引导的动态轨迹生成器,通过一个时间步自适应的分类器引导框架,从噪声中迭代去噪生成风格化轨迹。模块一:多源风格感知编码器 —— 给模型一双“慧眼”
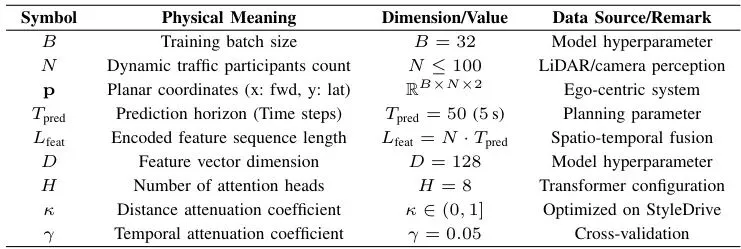
这个编码器负责“看”和“理解”。它接收所有信息:自车状态、周围动态车辆/行人位置(用p表示)、静态地图、甚至交通灯状态,还有一个关键的驾驶风格指示器S(比如“激进”、“正常”、“保守”)。它的核心创新在于距离感知注意力机制。道理很简单但很重要:离你越近的车,对你的安全影响越大,模型就应该越关注它。 论文通过计算所有交通参与者之间的欧氏距离矩阵 Ddist,并引入一个可学习的衰减系数 κ,生成一个注意力偏置。这样,在模型内部计算注意力权重时,远处的物体自然就被“降权”了。 同时,它还融合了时间自注意力(关注行为随时间的变化)和空间自注意力(关注物体间的相对位置)。最终,所有这些信息被融合成一个高维的“风格化特征” zstyle。这个 zstyle 就像一份浓缩了“场景报告”和“用户指令”的简报,会被送给下一个模块作为指导。表I:多源风格感知编码器关键符号定义。这张表清晰列出了编码器中用到的主要符号及其物理意义,例如B是批量大小,N是动态交通参与者数量,Tpred是预测时间步等。
同时,它还融合了时间自注意力(关注行为随时间的变化)和空间自注意力(关注物体间的相对位置)。最终,所有这些信息被融合成一个高维的“风格化特征” zstyle。这个 zstyle 就像一份浓缩了“场景报告”和“用户指令”的简报,会被送给下一个模块作为指导。表I:多源风格感知编码器关键符号定义。这张表清晰列出了编码器中用到的主要符号及其物理意义,例如B是批量大小,N是动态交通参与者数量,Tpred是预测时间步等。模块二:风格引导的动态轨迹生成器 —— 给模型一个“平衡术”
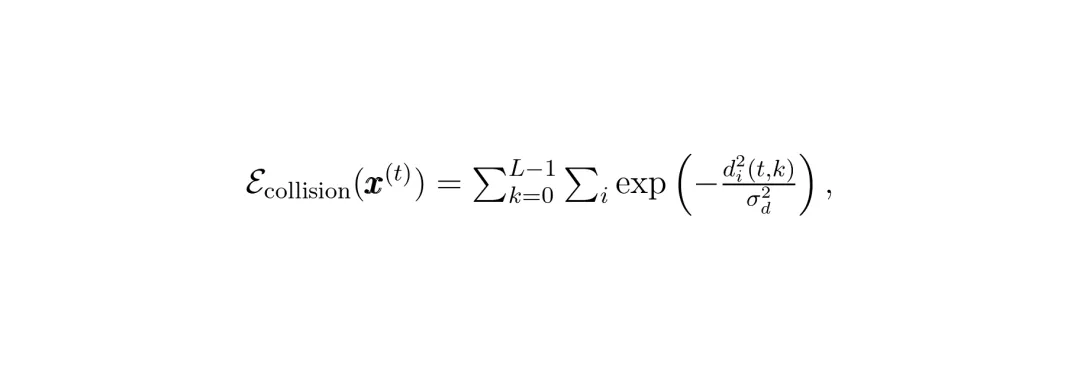
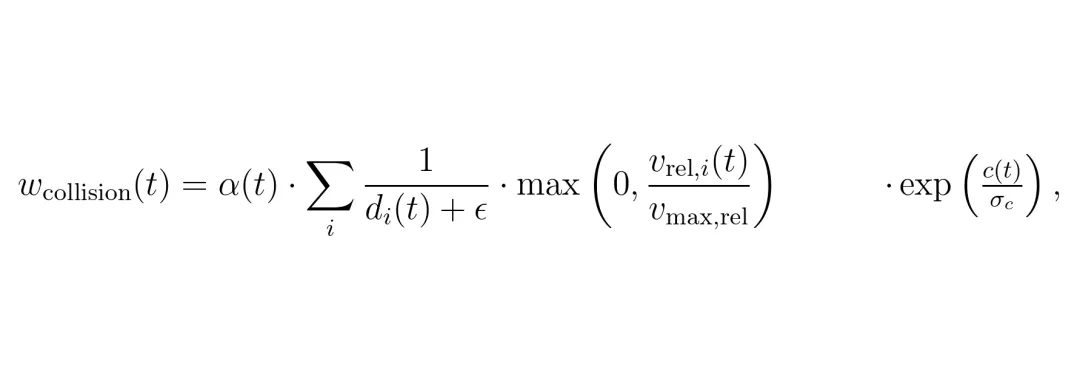
这是SDD Planner的精华所在。扩散模型的去噪过程(从t=T的噪声到t=0的干净轨迹)被巧妙地“引导”了。首先,zstyle特征通过“缩放平移”方式注入每一步去噪中,确保生成的轨迹符合场景和风格。其次,也是更关键的,引入了动态引导。它定义了两种“能量函数”:1. 碰撞避免能量:量化轨迹与障碍物的碰撞风险。离障碍物越近,能量值越高,惩罚越大。2. 速度遵从能量:量化轨迹速度与预设风格(如激进风格希望达到限速的1.1倍)的偏差。 妙就妙在,这两个能量的权重不是固定的,而是随时间步t动态变化,并且考虑了实时路况!例如,碰撞避免的权重 wcollision(t) 会随着相对速度、道路曲率增加而变大。这意味着,当旁边有车快速靠近,或者道路弯道很急时,系统会自动把“安全”的优先级调得更高,哪怕你选择的是“激进”模式。同样,速度遵从的权重 wspeed(t) 会根据交通密度调整。车少路空时,可以更自由地追求速度风格;车多拥堵时,则会更谨慎。
妙就妙在,这两个能量的权重不是固定的,而是随时间步t动态变化,并且考虑了实时路况!例如,碰撞避免的权重 wcollision(t) 会随着相对速度、道路曲率增加而变大。这意味着,当旁边有车快速靠近,或者道路弯道很急时,系统会自动把“安全”的优先级调得更高,哪怕你选择的是“激进”模式。同样,速度遵从的权重 wspeed(t) 会根据交通密度调整。车少路空时,可以更自由地追求速度风格;车多拥堵时,则会更谨慎。 最后,这两个能量按动态权重融合,形成总能量梯度,去“修正”扩散模型每一步的去噪方向。引导强度 λ(t) 也是动态的:在去噪早期(轨迹还很模糊时)加强引导,确保大方向安全;在后期则减弱引导,精细调整风格细节。
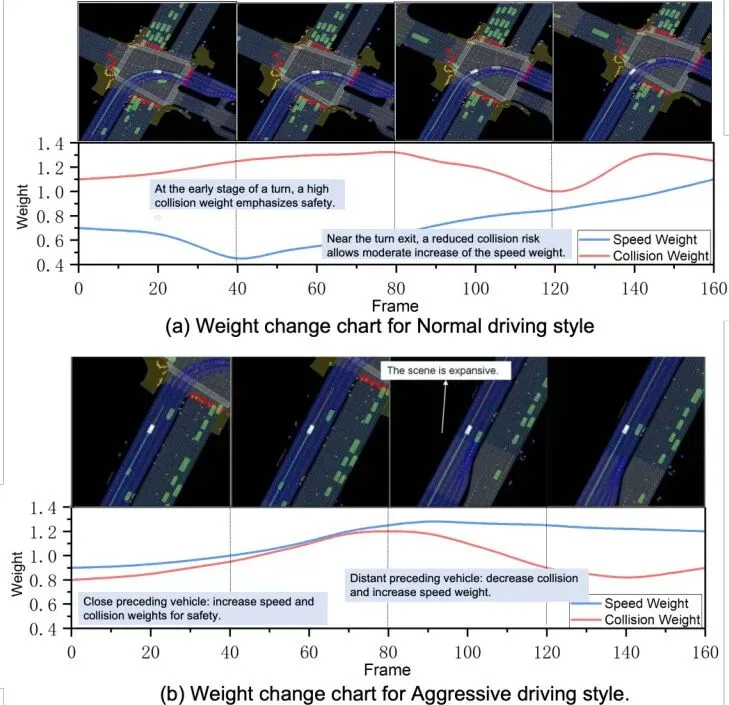
最后,这两个能量按动态权重融合,形成总能量梯度,去“修正”扩散模型每一步的去噪方向。引导强度 λ(t) 也是动态的:在去噪早期(轨迹还很模糊时)加强引导,确保大方向安全;在后期则减弱引导,精细调整风格细节。 这个“动态”二字,就是SDD Planner的灵魂。它让安全和风格从“静态妥协”变成了“动态协同”。图4:两种不同驾驶场景下的权重变化图。这张图直观展示了在不同场景(如路口vs直道)下,碰撞避免和速度遵从的优先级权重是如何实时变化的,体现了动态调和的精髓。
这个“动态”二字,就是SDD Planner的灵魂。它让安全和风格从“静态妥协”变成了“动态协同”。图4:两种不同驾驶场景下的权重变化图。这张图直观展示了在不同场景(如路口vs直道)下,碰撞避免和速度遵从的优先级权重是如何实时变化的,体现了动态调和的精髓。实验验证:全面领先的规划性能
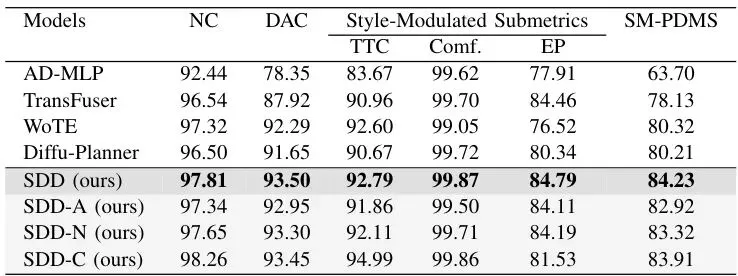
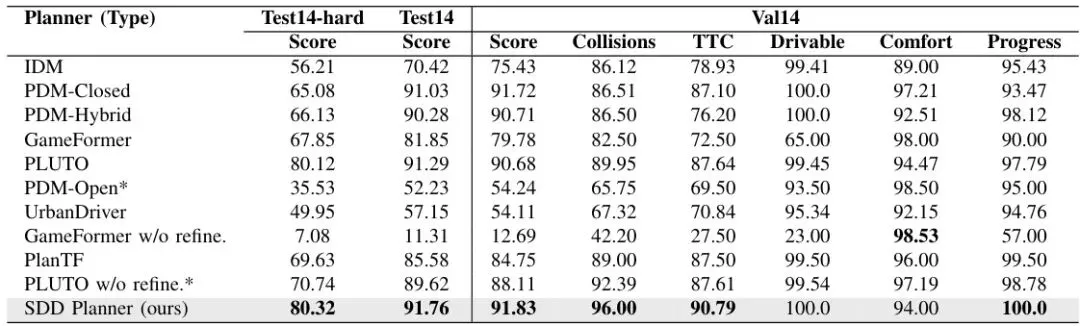
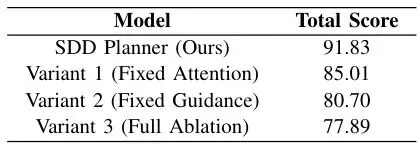
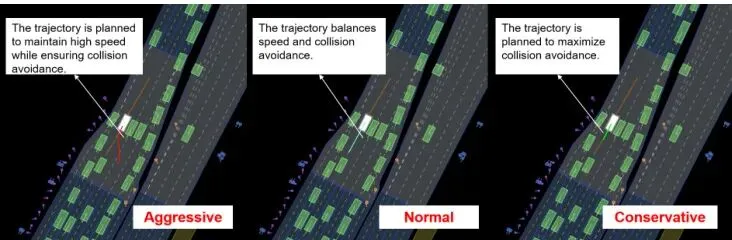
理念再好,也得靠实验说话。本文在两大权威数据集上进行了测试:专注于个性化驾驶的StyleDrive,和面向综合性能的NuPlan。在StyleDrive上,评价指标是SM-PDMS(风格调制预测驾驶员模型分数),它综合了无碰撞、可行驶区域合规以及行为对齐(即风格符合度)。SDD Planner在激进、正常、保守三种风格下,全面超越了所有基线模型,尤其是相比最强的WoTE基线,在SM-PDMS上提升了3.9%。这说明它在风格化驾驶方面确实做到了顶尖。表II:在StyleDrive数据集上的性能对比。SDD-A/N/C分别代表激进、正常、保守风格的结果。可以看到,SDD Planner在所有风格和几乎所有子指标上都名列前茅。在更具挑战性的NuPlan基准(包括常规Test14和高难度Test14-hard)上,SDD Planner更是取得了综合分数排名第一的成绩,超越了包括冠军方案PDM在内的众多强劲对手。这证明了其方法不仅在风格化上优秀,在通用安全性、舒适性、通行效率等核心指标上也是顶尖水平。表III:在NuPlan数据集上的性能对比。SDD Planner在总分上领先,尤其是在高风险的Test14-hard集上表现出更强的鲁棒性。消融实验(Ablation Study)进一步验证了动态引导机制的有效性。如表IV所示,去掉动态权重调整(用固定权重),或去掉整个引导机制,性能都会出现明显下降,尤其是在风格对齐分数上。这说明论文提出的动态调和策略是性能提升的关键。表IV:动态引导机制的消融实验结果。证明了动态权重(Ours (Dynamic))比固定权重(Ours (Fixed Weights))和没有引导(Ours w/o Guidance)效果更好。图5:不同驾驶风格下生成轨迹的对比。可以直观看到,激进风格轨迹更靠近车道中心线、换道更果断;保守风格则更偏向车道一侧,留有更多余地。这印证了模型对不同风格的理解和生成能力。从仿真到实车:安全与风格的闭环验证
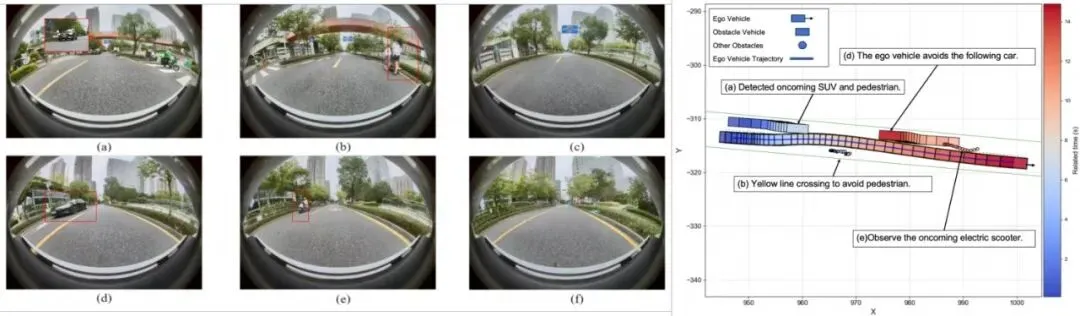
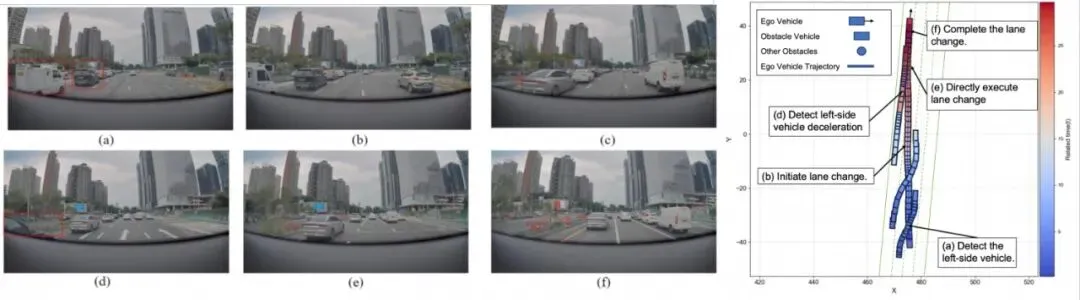
论文最硬核的部分来了——实车测试!这不仅证明了算法在仿真中的优越性,更验证了其工程落地潜力。研究人员将SDD Planner部署到真实的自动驾驶车辆上,进行闭环测试。结果展示,系统能够在保证高标准安全的同时,忠实地执行预设的驾驶风格。图8:动态避障场景。车辆在保守风格下,安全地让行一辆SUV,并借对向车道绕过行人,全程与行人和对向来车保持安全距离,轨迹平滑。图9:激进连续变道场景。车辆在激进风格下,加速并执行连续变道,快速汇入车流,轨迹体现了果断的横向操纵,以最大化通行效率。未来展望:更精细的风格与更高效的融合
SDD Planner无疑为个性化自动驾驶规划打开了一扇新的大门。展望未来,还有几个方向值得深入:1. 风格定义的精细化:目前风格是离散的(激进/正常/保守)。未来是否可以支持连续滑杆调节,或者学习每个用户独特的驾驶习惯,实现真正的“千人千面”?2. 引导机制的高效化:动态引导虽然效果好,但引入了额外的能量函数计算和梯度调整,可能增加推理耗时。如何设计更轻量、更高效的引导方式,以满足车规级芯片的实时性要求,是一个工程挑战。3. 安全边界的可解释性:如何让用户更直观地理解系统在某个时刻为何选择了“保守”而非“激进”?增强决策的可解释性,对于建立用户信任至关重要。龙迷三问
这篇论文解决的核心问题是什么?解决自动驾驶轨迹规划中“安全”与“个性化驾驶风格”难以动态、实时兼容的难题。传统方法往往在两者间做静态妥协,而SDD Planner提出了一种基于扩散模型的框架,能根据实时路况动态调整安全与风格的优先级,生成既安全又符合用户偏好的轨迹。
SDD中的“扩散模型”是什么?扩散模型是一种强大的生成式人工智能模型。你可以把它想象成一个“学习去噪的画家”。训练时,它反复观看一张名画被逐步泼上颜料(加噪声)的过程;然后学习如何从一团乱七八糟的颜料中,一步步擦除(去噪),还原出名画。在轨迹规划中,“名画”就是合理的行驶路径,“噪声”就是随机扰动。模型学会从随机起点“画出”多样且合理的轨迹。
“动态引导”具体是怎么工作的?可以理解为给扩散模型的“绘画过程”配了一个“实时监理”。这个监理手握两份清单:一份是“安全红线”(碰撞避免能量),一份是“风格指标”(速度遵从能量)。监理的厉害之处在于,他不仅看这两份清单,还会根据画布进展(去噪时间步t)和周围环境(车流、路况)动态决定哪份清单更重要。比如画到一半发现旁边有车突然靠近(风险高),他就立刻把“安全红线”清单举高,大声提醒画家先保证别画到线外;等危险解除,再举“风格指标”清单,让画家把线条画得更流畅(符合风格)。这个动态调整权重的过程,就是动态引导。
如果你还有哪些想要了解的,欢迎在评论区留言或者讨论~龙哥点评
论文创新性分数:★★★★☆ (4星)
将扩散模型用于轨迹规划不是首创,但创新性地引入“时间步和场景自适应的动态引导机制”来调和安全与风格,思路清晰且有新意。多源编码器中的距离感知注意力也设计得较为巧妙。
实验合理度:★★★★★ (5星)
实验设计非常扎实。在两个权威数据集(StyleDrive和NuPlan)上进行了全面测试,对比了众多SOTA方法,并进行了充分的消融实验。指标选用合理,涵盖了安全、风格、舒适、效率等多个维度。实车闭环测试更是大大增加了结果的可信度。
学术研究价值:★★★★☆ (4星)
为“个性化安全规划”这一重要且实际的问题提供了一个新颖且有效的解决方案框架。其动态引导的思想可以被借鉴到其他需要平衡多目标、多约束的生成任务中,具有较高的研究启发价值。
稳定性:★★★★☆ (4星)
从仿真和实车测试结果看,在给定风格和场景下,规划出的轨迹稳定可靠。但由于扩散模型的随机性本质,在极端边缘案例下,生成轨迹的绝对确定性仍需进一步验证和约束。
适应性以及泛化能力:★★★★☆ (4星)
在NuPlan多城市数据和实车测试中表现良好,显示出较强的场景泛化能力。风格定义目前是预设的三种,但框架具备扩展更细粒度风格的能力。
硬件需求及成本:★★★☆☆ (3星)
扩散模型的迭代去噪过程以及动态引导中的梯度计算,相比单次前向的模型(如MLP、普通Transformer)计算开销更大。虽然论文中实现了实时规划,但对车载计算平台(尤其是量产车规芯片)仍是一个挑战。训练成本也相对较高。
复现难度:★★★☆☆ (3星)
方法描述清晰,但涉及扩散模型训练、动态引导的工程实现等,对研究者的理论和工程能力要求较高。若无开源代码,完整复现具有一定难度。
产品化成熟度:★★★☆☆ (3星)
已通过实车验证,证明了原理可行和工程潜力,是迈向产品化的重要一步。但要达到车规级量产要求,还需在计算效率优化、极端情况下的确定性保障、系统冗余设计等方面进行大量工作。
可能的问题:动态引导的能量函数和权重设计包含一些启发式参数(如距离衰减系数σd),其最优值可能依赖于特定数据集。在更广泛或分布外场景中,这些参数是否需要调整以及如何自适应,是未来需要关注的问题。
[1] 原论文: Shuo Pei, Yong Wang, et al. “Safe and Stylized Trajectory Planning for Autonomous Driving via Diffusion Model”. arXiv:2602.04329, 2026.[2] StyleDrive 数据集: A large-scale dataset for personalized end-to-end autonomous driving.[3] NuPlan 数据集: A large-scale public dataset for autonomous driving planning research.*本文仅代表个人理解及观点,不构成任何论文审核或者项目落地推荐意见,具体以相关组织评审结果为准。欢迎就论文内容交流探讨,理性发言哦~ 想了解更多原文细节的小伙伴,可以点击左下角的"阅读原文",查看更多原论文细节哦!

🚗 想让你的AI驾驶风格“一键切换”?想和更多自动驾驶、机器人领域的大佬交流前沿技术?
欢迎加入龙哥读论文粉丝群,
扫描下方二维码或者添加龙哥助手微信号加群:kangjinlonghelper。
一定要备注:研究方向+地点+学校/公司+昵称(如 自动驾驶+北京+清华+龙哥),根据格式备注,可更快被通过且邀请进群。