1、Lidar技术总体演进方向
机械式→半固态→全固态
2、全行业的Lidar演进方案及应用的芯片、光学部件方案如下
| | | | | | |
| | | VCSEL+驱动芯片
光纤激光器(图达通用,需要转镜+振镜) | | | |
| | | SiPM(905nm禾赛速腾用)(弱光灵敏度比APD更高)
SPAD(禾赛AT512用)
APD(1550nm,途达通用)
+接收链路芯片 | | SPAD(更适合Flash方案,单位芯片面积下像素数优于SiPM) | |
| | | | | | |
| | | | | | |
| | | | | | |
| | | | | | |
以上禾赛AT128的VCSEL+SiPM+一维转镜的方案从技术以及量产可靠性上有优势。从CES2024上,禾赛发布AT512(VCSEL+SPAD+一维转镜)看,其技术路线保持了相对稳定连续,没有比较大的技术路线变化。
另外速腾EEL+SiPM+MEMS振镜的方案从技术以及量产可靠性上也同样有优势,从其后续的MX等产品看,其技术路线保持了相对稳定连续,没有比较大的技术路线变化。
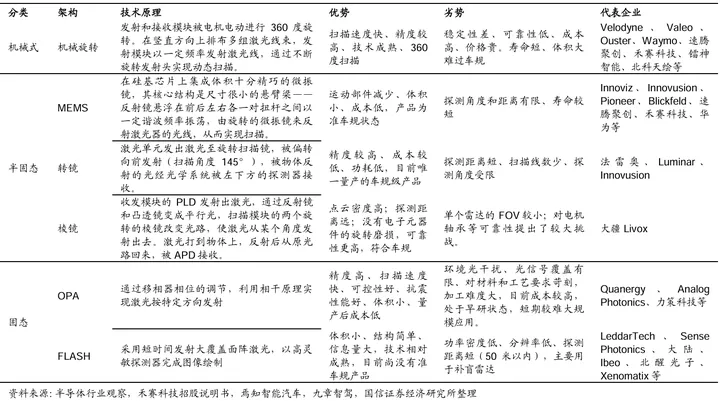
下表为国信证券整理的Lidar不同技术路线的原理、特点以及代表性企业,可以参考,但是性能不能完全接受。
3、机械式Lidar、棱镜式现状Lidar
参见后续章节,目前已经不是主流方案。
4、转镜式Lidar、MEMS振镜式Lidar现状
参加后续章节,目前主流方案是禾赛的转镜式Lidar,以及速腾的MEMS振镜式Lidar。
5、全固态Lidar现状
5.1 大陆HFL110已量产装车,指标可信
 图1 大陆HFL110
图1 大陆HFL1105.2 OUSTER 没有量产,技术指标存疑问,但是理论上是可以达到的
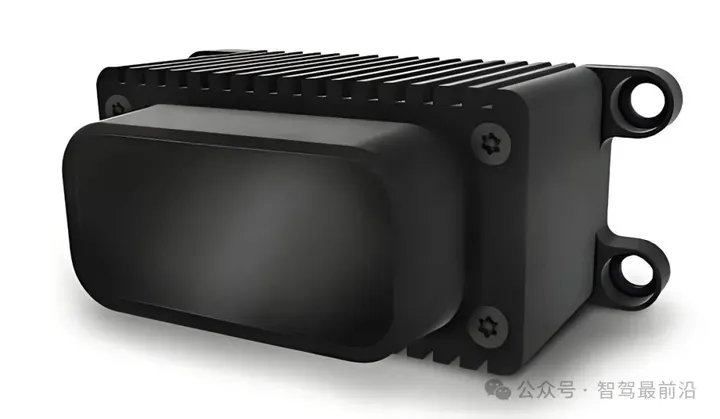 图2 OUSTER ES2
图2 OUSTER ES2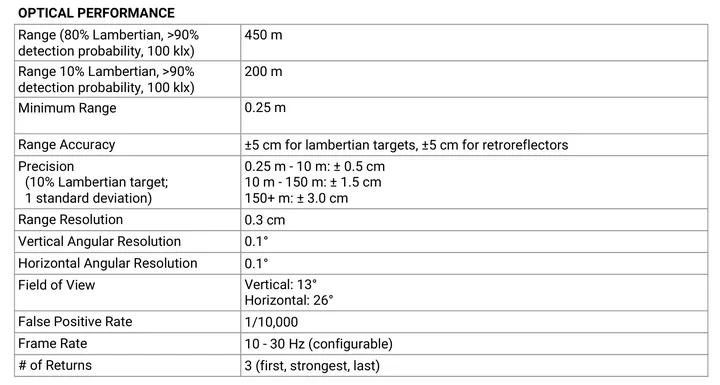
图3 ES2技术指标https://images.kempstoncontrols.com/page_assets/manu_landing/ouster/datasheet-ES2.pdf
5.3 FMCW Lidar
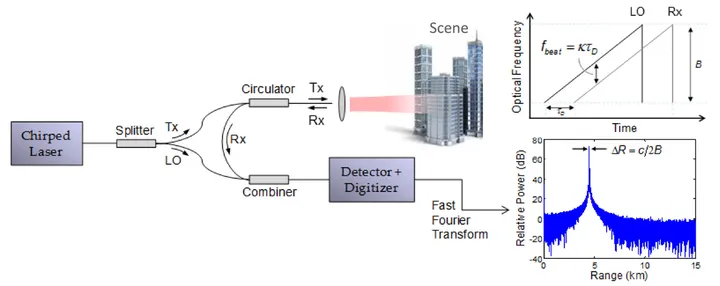 图4 FMCW Lidar Diagram
图4 FMCW Lidar Diagram5.4 FMCW+OPA Lidar
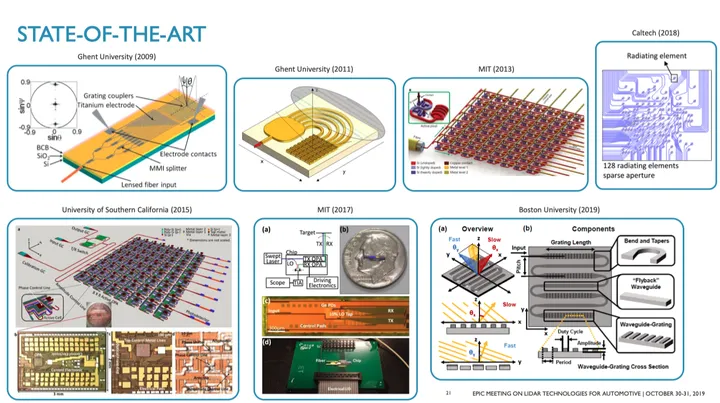 图5 多种OPA方案
图5 多种OPA方案将OPA和FMCW Lidar进行结合
OPA扫描通常基于硅光芯片,而TOF的峰值功率过高,硅光芯片往往承受不住;FMCW的信噪比很高,即便用很低的功率,也可以获得足够多的“有效信号”。FMCW更适合和OPA结合。如何涉及到进行该方案的Lidar开发,需要有集成化的芯片模块,类似Avea开发的模块,该模块集成了光源、OPA,最终基于该模块构建Lidar。
 图6 Avea Lidar核心模块
图6 Avea Lidar核心模块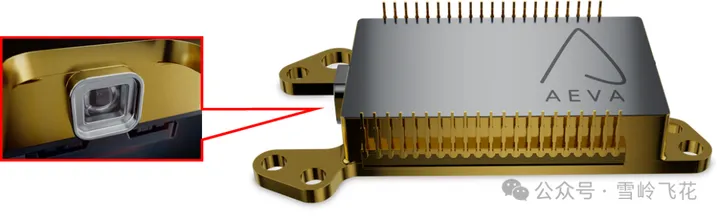 图7 Avea Lidar核心模块
图7 Avea Lidar核心模块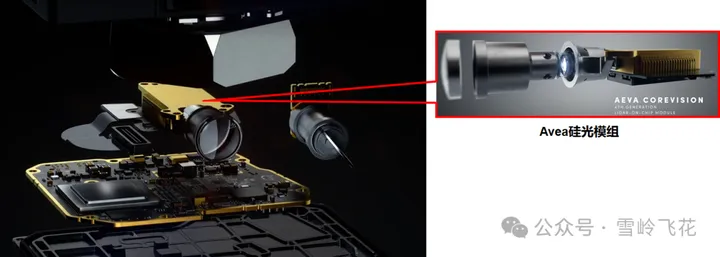 图8 Avea LIdar核心模块
图8 Avea LIdar核心模块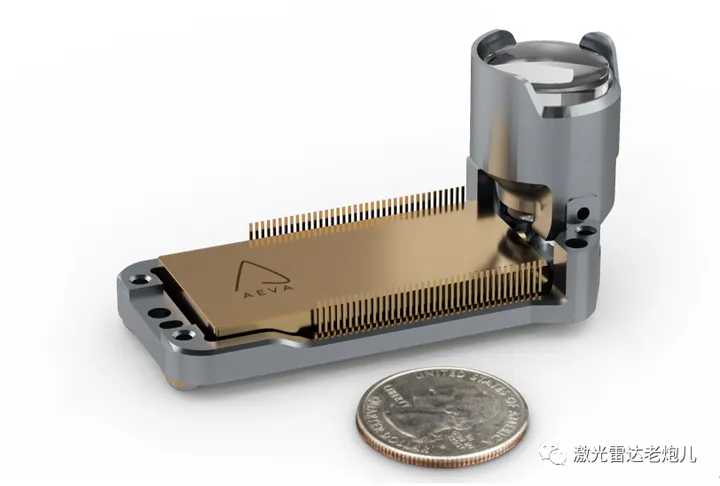 图9 Avea LIdar核心模块
图9 Avea LIdar核心模块实现技术指标如下
综上,Flash激光雷达的优点在于直接去除了扫描模块,但由于是面光源(MEMS 等扫描方式为点光源),因此能量相比点光源较为发散,难以到达远距离探测。影响Flash激光雷达性能的部件主要是发射模块的垂直腔面 发射激光(VCSEL)及接收模块中的单光子雪崩二极管(SPAD)。VCSEL方面,目前商用VCSEL发射功率不断提升,同时VCSEL阵列实现相同峰值功率下对车辆前方更远距离的探测。SPAD 方面,其发展目前同样沿着摩尔定律式的性能曲线移动,随着SPAD的快速发展FLASH 激光雷达有望率先成为商用于中距离探测的固态式激光雷达。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
