关于年后自动驾驶算法岗位需求的梳理
- 2026-02-24 20:40:28

点击下方卡片,关注“自动驾驶之心”公众号
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
赶着假期之前,给年后有换工作的同学同步一下柱哥掌握的一些信息。总结来说:L2下沉,L4爆发。
头部新势力自驾算法岗位维持或收缩,会有一批具身hc的岗位开放,小米、理想、小鹏这几家为代表; 去年发展势头较猛的Tier1还在大批量招人,像卓驭、地平线,据柱哥掌握的信息,端到端/WM等岗位TOP4硕士薪资总包在75左右; 中游的Tier1、主机厂和L4赛道在扩招,大量扩招,最缺的岗位也是端到端、VLA、世界模型,配合云端模型、规控、SLAM、感知的少量岗位。
关于端到端、VLA和世界模型的技术梳理,大家可以可以参考下这篇文章的一些思路。通用的技术栈像BEV感知、多模态大模型、Transformer,算是基础中的基础了,这些内容凭借知乎已有的文章可以基本入门。下面主要是重点聊聊每个技术栈之间的区别和平台针对这些技术领域设计的课程,课程咨询联系:AIDriver005

端到端量产小班课
适合人群:适合校招求职、社招跨行和进一步提升工作技能的社招同学。
核心亮点:大量的工程落地经验分享,强化学习、自回归、Diffusion是比较前沿的端到端落地方向。
老师介绍:王路, C9本科+QS50 PhD,已发表CCF-A和CCF-B论文若干。现任国内TOP tier1算法专家,目前从事大模型、世界模型等前沿算法的预研和量产,所研发算法已成功落地并量产,拥有丰富的端到端算法研发和实战经验。
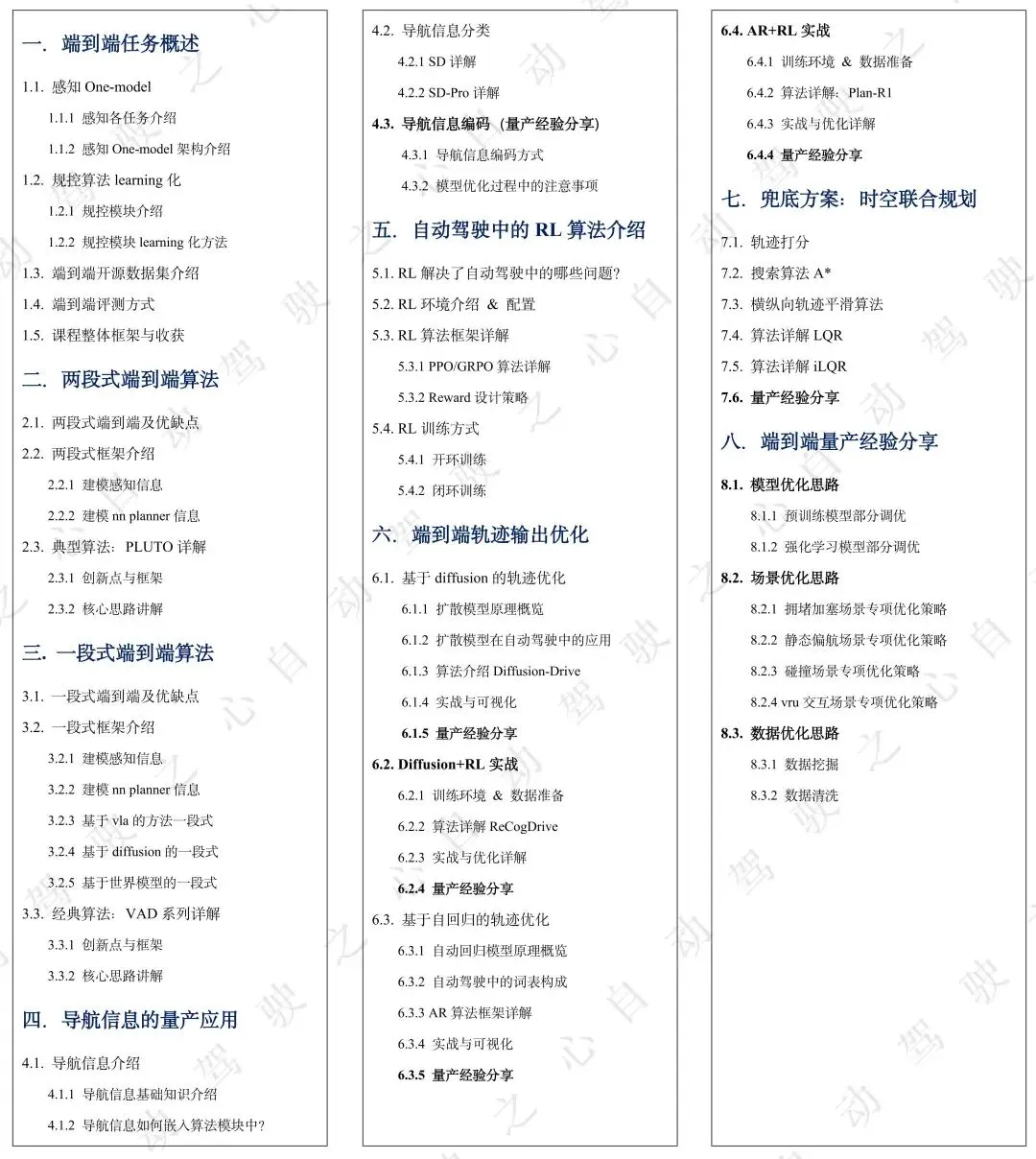
这门课程的设计思路:主要是聚焦在一段式端到端的落地。像SD导航的接入,强化学习的应用(GRPO),以及目前业内主流的基于Diffsuion和基于AR的轨迹输出方法,包括兜底的方案都是比较实际的落地刚需。这门课会分享很多实际的落地方法,讨论可能的解决方案,大家可以看下具体的大纲。
课程大纲
端到端与VLA自动驾驶小班课
适合人群:适合入门学习的学生和已经工作的小伙伴,比较系统的梳理了相关基础的技术栈。
核心亮点:涵盖了端到端与VLA的主流技术栈,两段式端到端,基于感知/世界模型/扩散模型/VLA的一段式端到端,非常适合用来打基础。
老师介绍:Jason, C9本科+QS50 PhD,已发表CCF-A论文2篇,CCF-B论文若干。现任国内TOP主机厂算法专家,目前从事端到端、大模型、世界模型等前沿算法的预研和量产,并已主持和完成多项自动驾驶感知和端到端算法的产品量产交付,拥有丰富的端到端算法研发和实战经验。
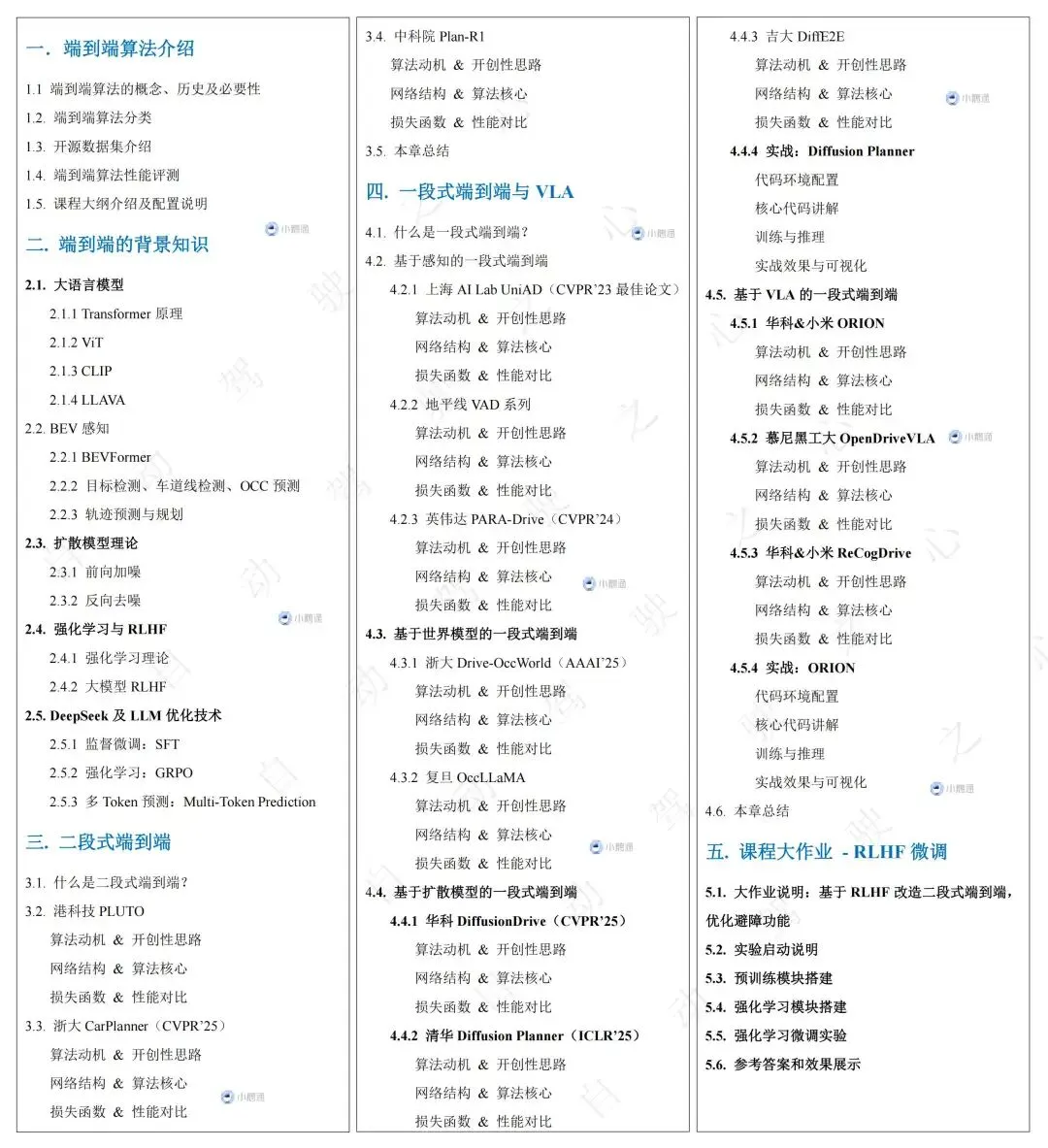
这门课程的设计思路:系统性全面的梳理端到端和VLA技术领域。大纲涵盖的内容可以cover主流面试的所有技术内容,基于感知和基于世界模型的方法目前量产用到的不多,但适合搞研究的人继续突破。扩散模型、VLA和强化学习是重中之重,也是我们课程的重点内容。
课程大纲
世界模型与自动驾驶小班课
适合人群:适合入门学习的学生和已经工作的小伙伴。
推荐原因:世界模型在26年会有一波大的爆发,现在是比较好的时机。
核心亮点:非常详细的基础讲解,以及全面的技术栈梳理,从通用世界模型到视频生成再到OCC生成。
老师介绍:Jason, C9本科+QS50 PhD,已发表CCF-A论文2篇,CCF-B论文若干。现任国内TOP主机厂算法专家,目前从事端到端、大模型、世界模型等前沿算法的预研和量产,并已主持和完成多项自动驾驶感知和端到端算法的产品量产交付,拥有丰富的端到端算法研发和实战经验。
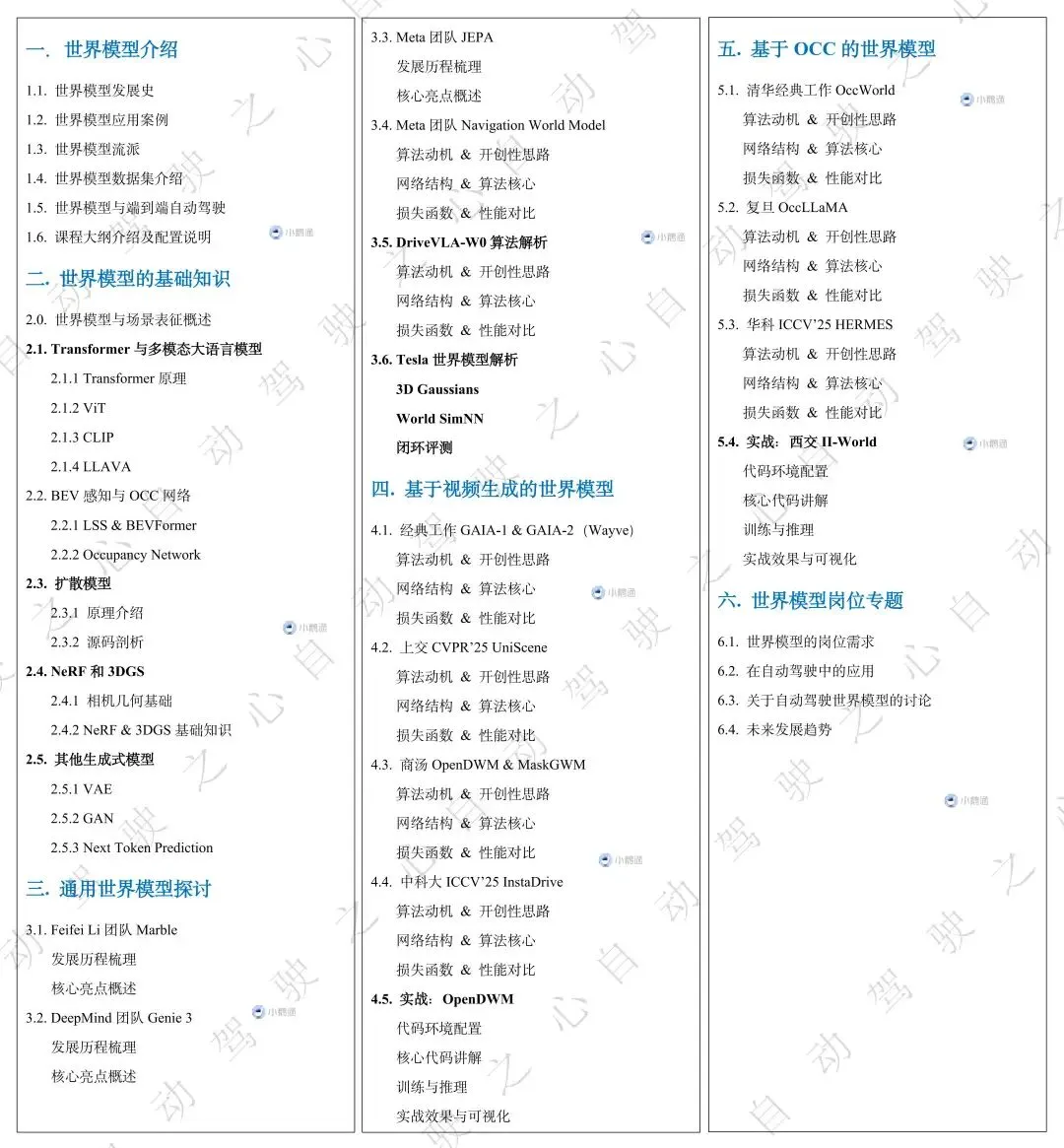
这门课程的设计思路:世界模型似乎一直是个神秘的领域,大家都在提世界模型,但自动驾驶领域的世界模型到底是什么,一直没人能讲得清楚。所以这门课把世界模型的基础,通用世界模型、视频生成和OCC世界模型跟大家聊明白,到底世界模型是什么。
课程大纲
自动驾驶VLA与大模型实战课程
适合人群:适合专攻自驾VLA方向的同学,尤其是大四、研零/研一的小伙伴。
老师介绍:咖喱,清华大学硕士生,在ICCV/IROS/EMNLP/Nature Communications发表论文若干篇。目前从事多模态感知、自动驾驶VLA、大模型Agent等前沿算法的预研,并已主持和完成多项自动驾驶感知和大模型框架工具,拥有丰富的自动驾驶、大模型研发和实战经验。
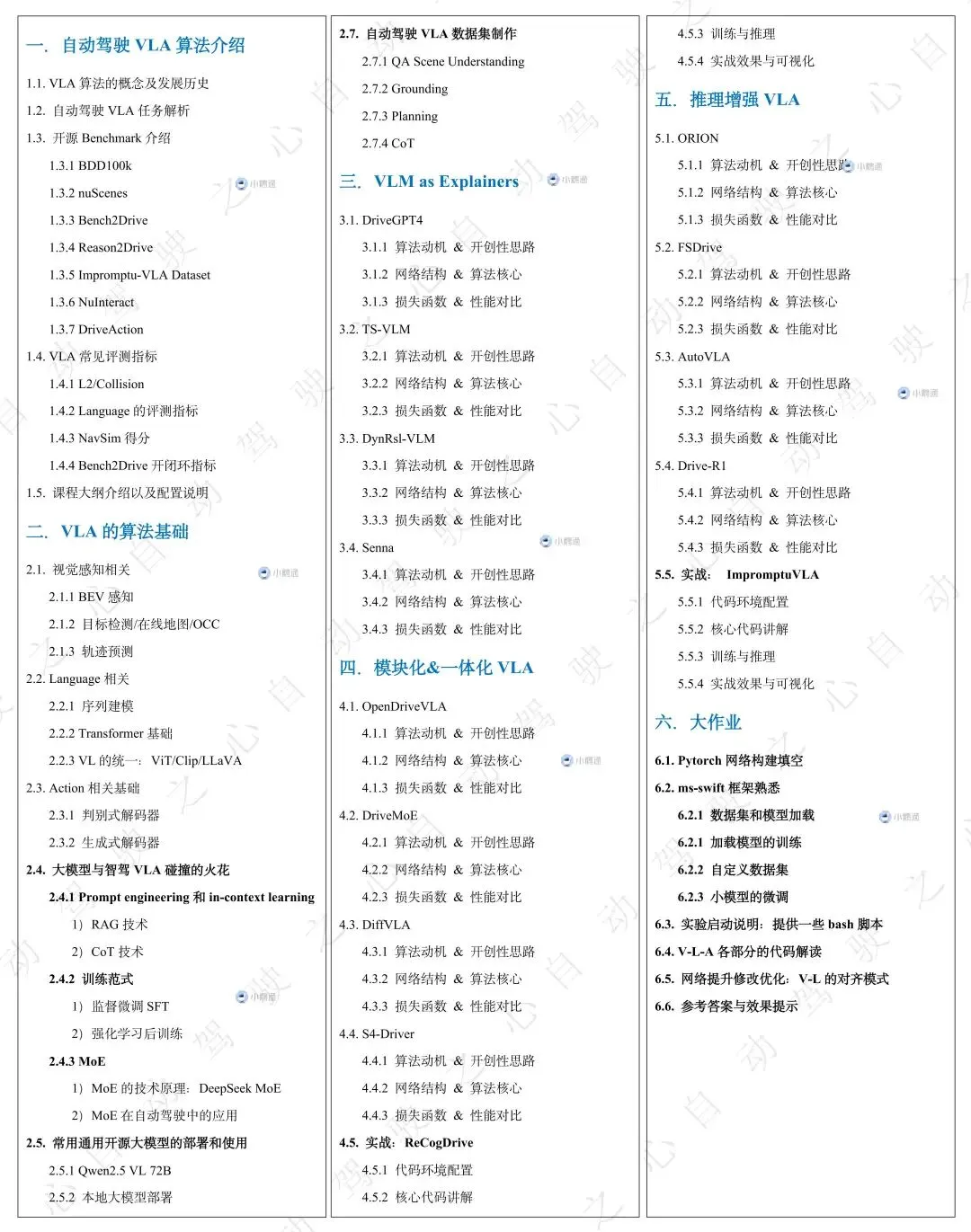
课程大纲
课程咨询
课程咨询联系:AIDriver005


