| | |
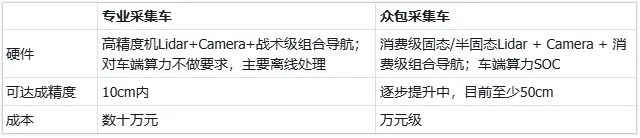
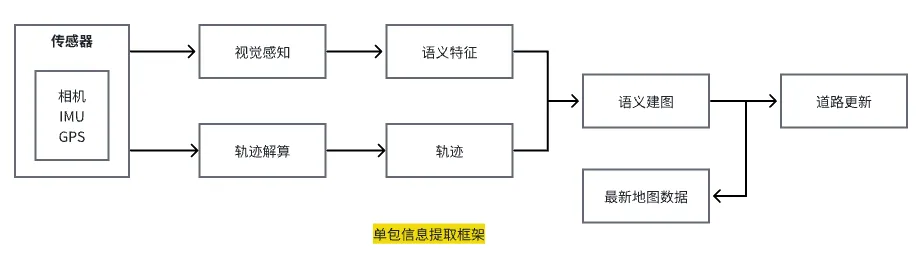
| 使用地图采集车辆,利用各种传感器(激光雷达,相机,组合导航等)采集道路信息,并回传 | |
| 数据解算:对采集到的点云数据、组合导航数据进行后解算 | 软件:IE(Novatel),POSPAC(Applanix) |
| 底图构建:利用点云配准算法,结合组合导航数据,对激光点云进行拼接配准,生成底图。 | | |
| 要素分类与识别:基于深度学习方法,对3D点云与2D图像中的目标(如路牌、车道线、护栏等)进行分类、识别,提取道路各要素的语义信息。 | | |
| 矢量化:将识别出的各道路要素抽象化为带有语义信息的点、线、面,并建立要素间的关联信息。 | | |
| 人工编辑:对预处理中误识别、漏识别的要素进行检查,并进行人工补全; | 该过程一般基于专门的“内业操作平台”,可保证自动地图创建正确、完备; |
| | |
| | |
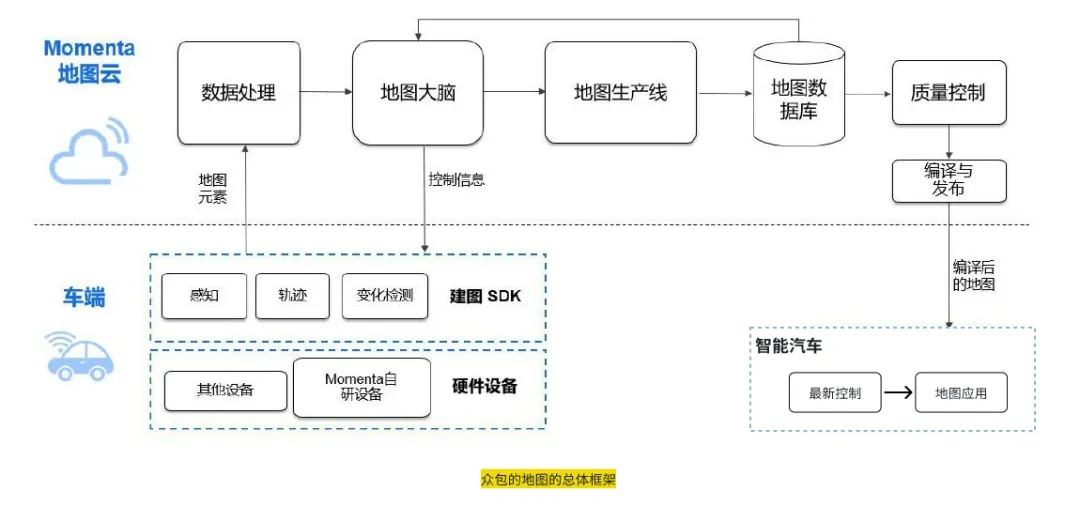
| 检测道路情况发生变化的路段,以一定周期更新和维护高精地图,保证地图的新鲜度 | |