长距Lidar设计:机械式和半固态这里不再讨论,这里主要针对全固态长距Lidar进行讨论
1、架构设计
OPA+FMCW Lidar(长距):设计目标,250m到500m,实现250m距离的点云有效覆盖(10%反射率),争取点云探测到500m(有速度信息),同时验证不同FOV镜头的外协设计,组合为多款产品。
 图1 FMCW+OPA Lidar
图1 FMCW+OPA Lidar具体设计架构如下
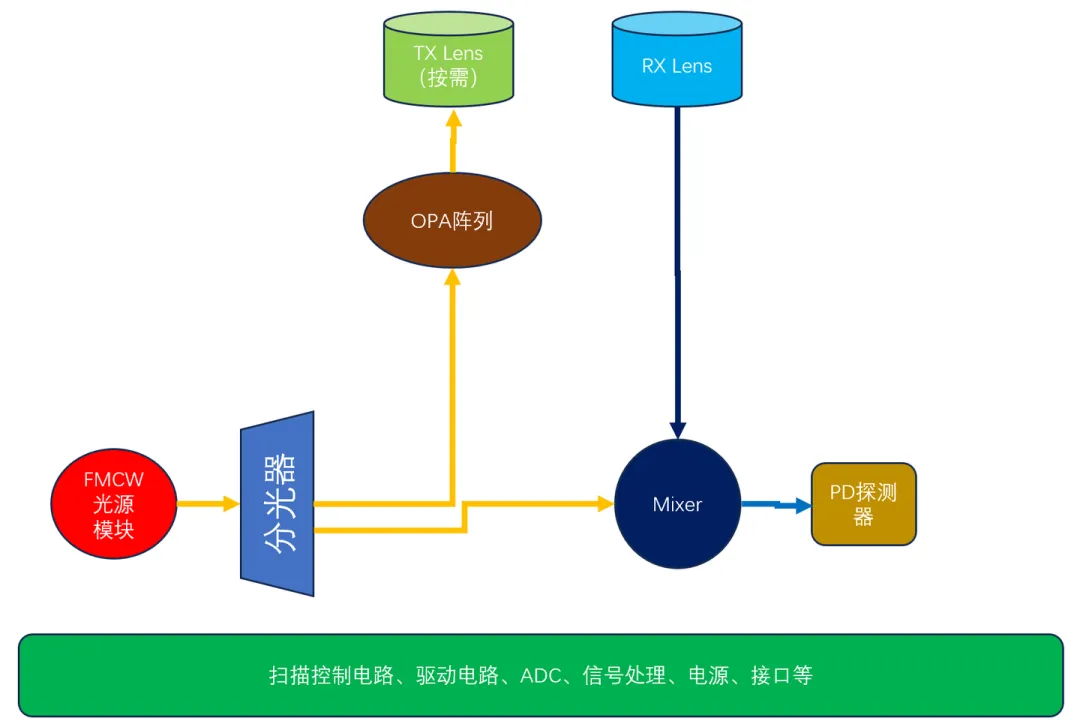 图2 FMCW+OPA Lidar 系统架构
图2 FMCW+OPA Lidar 系统架构- Tier1以及芯片主要厂商:Quanergy、洛微科技、力策科技、Analogphotonics、光迅科技、万集科技、摩尔芯光。
- Analogphotonics提供两种不同版本的激光雷达:一种是长距离版本,安装在汽车前部,用于高速公路行驶;另一种是短距离版本,视野更广,可提供车辆周围环境的完整覆盖。这两种传感器的光子集成电路具有不同的光学相控阵,但同时共享同一个后端信号处理机制。
- 洛微科技的短距和长距产品采用了不同的技术方案,短距聚焦低成本,采用了Flash扫描的混合性方案,长距侧重性能,选择OPA方案。
2、Lidar技术指标设计
 编辑
编辑
以上长距Lidar的水平FOV和垂直FOV都会依据具体的应用场景以及车身布置位置进行调整,该调整通过Lidar的Lens以及OPA的扫描范围进行设计配置。 速度和速度分辨率,这两个指标需要通过FMCW技术完成测量。
3、主板以及收发设计
目前都是定制化的模块,还没有量产芯片上市。芯片主要是基于硅光技术,后续章节会详细介绍该技术。
4、后端算法设计
- 远距Lidar OPA+FMCW版:点云均有速度信息,可以在上面的类似于视觉感知方案基础上,同时加入Radar的算法处理,对点云进行DBSCAN距离,然后进行动态目标跟踪和静态环境刻画;这就形成了Lidar中的算法体制双冗余互补。
- 完成目标跟踪以及环境刻画输出后,进一步分别和Camera/Radar的动态目标以及静态环境进行融合;
- L2以上需要感知融合链路的多样性,尽量减少共因失效;
- 融合方案上看前融合、中融合、后融合对原始信息的保留量依次递减,但是对噪声干扰的滤除也是依次递增,所以需要最大化最优化利用雷达输出数据进行处理;
- 单纯的Lidar传感器硬件层面是这些数据融合的共因来源,硬件上无法避免共因失效,但是算法层面上,前融合、中融合、后融合的交叉使用,可以提升环境感知算法和目标跟踪算法的置信度;
5、Lidar整体技术路线图

6、整体技术可行性和风险分析
从以分析可以看到,技术具有可行性,OPA+FMCW目前行业在不断迭代,OPA+FMCW均有相应的芯片和模块推出,并且也有相关方案的Lidar推出,其技术逐步走向成熟;
同时全固态Lidar的发展方向是行业的一个共识,尤其是OPA+FMCW;
域控算力集中化,Lidar传感器低成本化,是整体行业趋势;
该方案后续从车载以太网向高速Serdes网络迭代,直接输出RawData,到中央域控进行多层融合数据处理,提升相关算法的性能;
风险项如下:
OPA+FMCW方案配套的相关设备:例如E8717A Lidar Target Simulator,标定实验室(精密的测试标定设备)等,还需要配套更新;
目前的存在功能定义与分解(设计具体技术方案的选择,包括OPA+FMCW模块规格,镜头规格等)、Lidar信号处理算法实现(未来在域控端的实现)、雷达感知算法(包含速度信息分量后)在域控端的实现、雷达多层感知融合算法(传统类视觉的点云语义分割+具有速度维信息的DBSCAN)在域控的实现等技术难题,这些技术难题需要多领域方向的协作;
- 技术问题:OPA+FMCW需要涉及到对于的硅光模块或者专用芯片采购;
- 成本问题:从成本构成看,收发模组占据着分立式激光雷达60%的成本,人工调试占据25%的成本,机械、控制模组等其它零部件仅占据15%的成本;对于半固态激光雷达,收发器件(激光器、探测器)及芯片占据70%以上的成本,而光学等其他部件占比不足30%。业界主流观点认为,OPA+FMCW是未来激光雷达的终极解决方案,兼顾易于大规模生产、高性能等优势,并受益于硅光工艺发展实现光电器件的:快速降本。但是目前这还未实现,具体实现的时间点未知。
- 适用性问题:性能不断增强需要一个演进的过程,后续OPA+FMCW会从FOV、探测距离以及信息维度(增加速度维)上全面领先。但是还需要适配自动驾驶功能和Lidar算法进行相关技术迭代,例如目前所有OEM在使用Lidar点云就没有速度信息,这直接导致Lidar Tier1宣传的探测距离远,但是OEM 算法实际使用有效的Lidar点云距离在100m以内,如果有了点云速度信息,OEM算法能比较好的进行点云的动静区分,可以很容易将Lidar的实际使用距离扩展到更远。挑战:新的架构需要突破以上的技术挑战和成本挑战。
7、FMCW+OPA对Lidar的意义
- Lidar传感器成本得到进一步降低(Flash版本、以及OPA+FMCW版本,降本幅度不同),同时带动自驾整体的硬件架构成本降低;
- 当前传感器后融合中遇到各种corner case可以通过新体制的固态Lidar解决,例如无法区分动静目标,可以通过OPA+FMCW体制解决;
- 适应并满足L2+以及L4,甚至L5的自驾发展需求,低成本下、场景适用性下的多冗余,例如城市AD场景和AVP场景下,对Lidar的远距离需要并不强烈,此时可以用低端Flash Lidar进行冗余设计,低端Flash Lidar有效覆盖50m,同时提供大FOV,完成可以满足自驾在该场景下的多冗余;高速AD场景下,OPA+FMCW能更好的进行远距离目标和静态环境的构建;
8、Lidar部件供应商再罗列
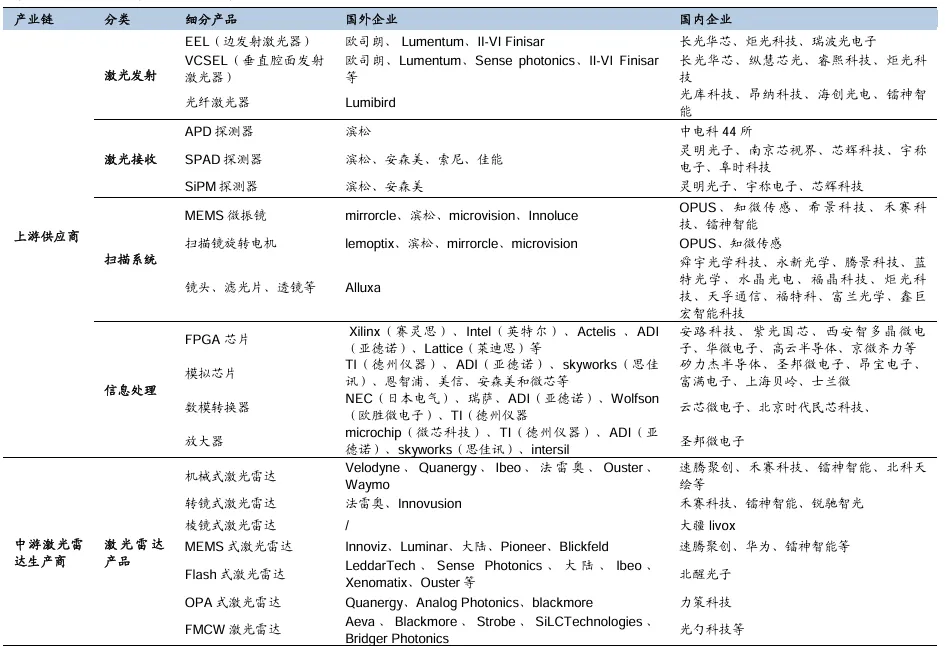 图3 Lidar相关供应商
图3 Lidar相关供应商国信证券-汽车汽配行业汽车前瞻研究系列(十六):激光雷达的市场空间、技术路线及产业链拆解-220127.pdf
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
