自动驾驶:感知系统解析
- 2026-02-26 00:53:58
近期,多家车企密集发布新一代智驾技术成果,从华为乾崑ADS4.1全场景智驾方案,到特斯拉FSD纯端到端架构,再到比亚迪天神之眼5.0的全域智驾落地,行业竞争进入了深水区。

(图片由AI生成)
在这场技术竞赛中,感知能力成为拉开差距的关键。如何让车“看得更清、辨得更准、反应更快”,是感知系统在传感器、融合、预测等多个环节的全面比拼。
今天重点解读 自动驾驶感知系统。
近期热门行业文章
自动驾驶感知系统基本介绍
感知系统的构成与作用
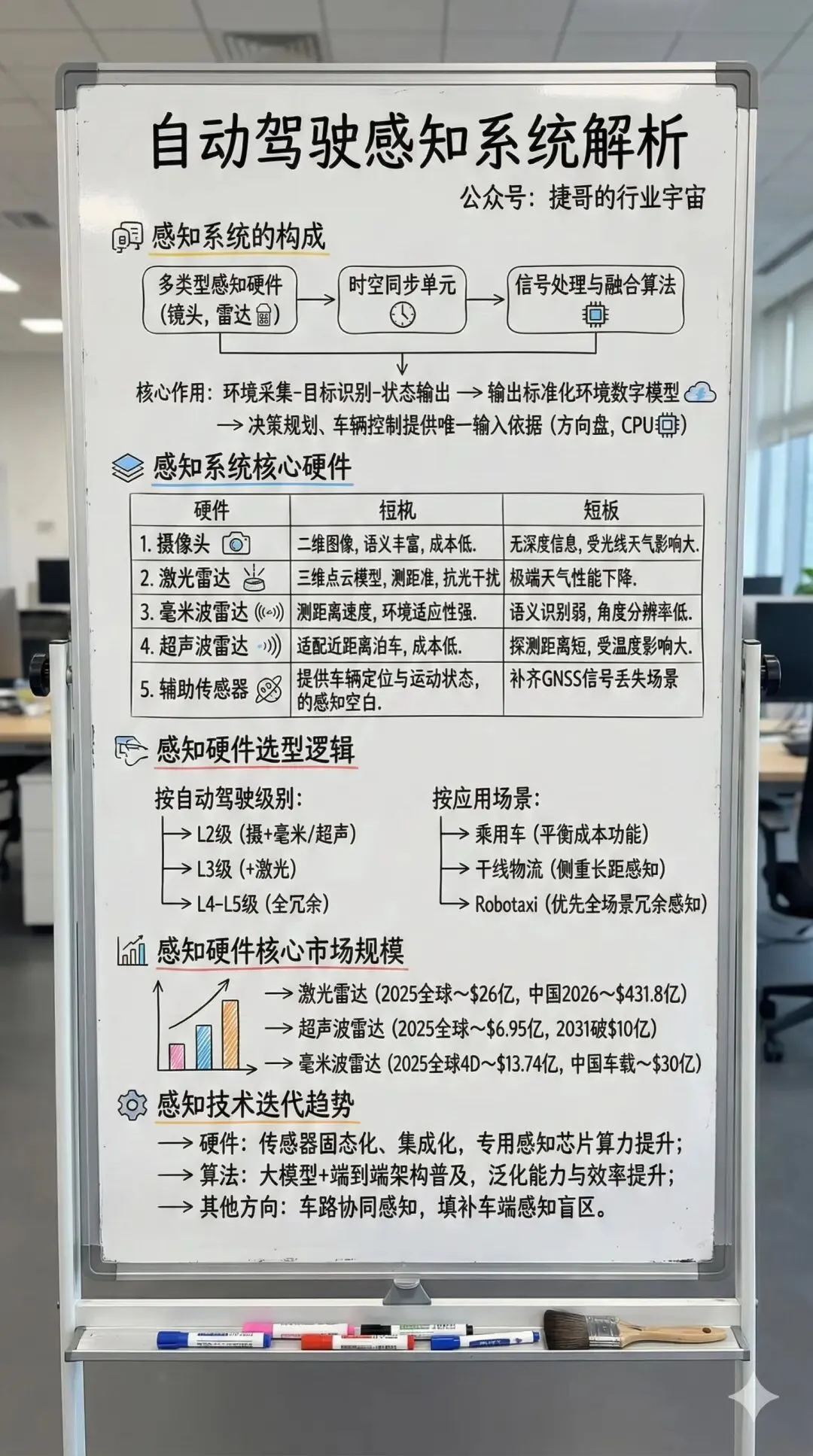
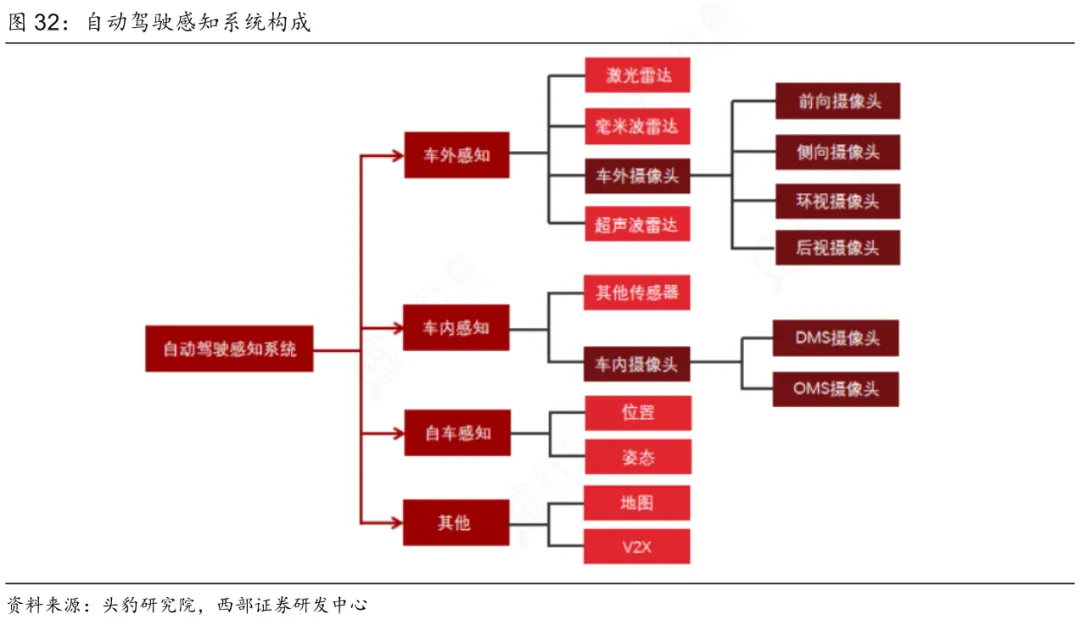
自动驾驶的感知系统,由多类型感知硬件、时空同步单元、信号处理与融合算法共同组成。
它的核心作用,是完成“环境采集-目标识别-状态输出”的全链路流程。
先通过各类传感器采集车辆周边的环境数据、自身运动状态数据,再通过算法完成目标分类、测距测速、语义分割与场景建模,最终输出标准化的环境数字模型,为后续的决策规划、车辆控制提供唯一的输入依据。
感知传系统的核心组成
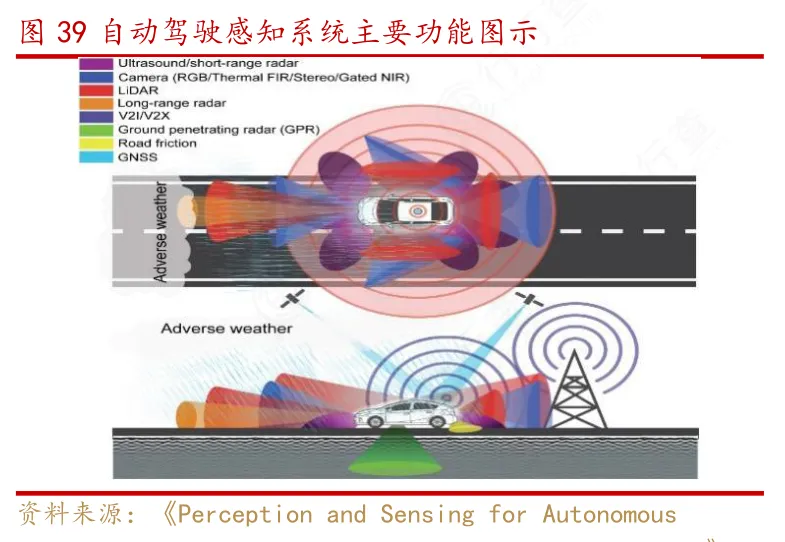
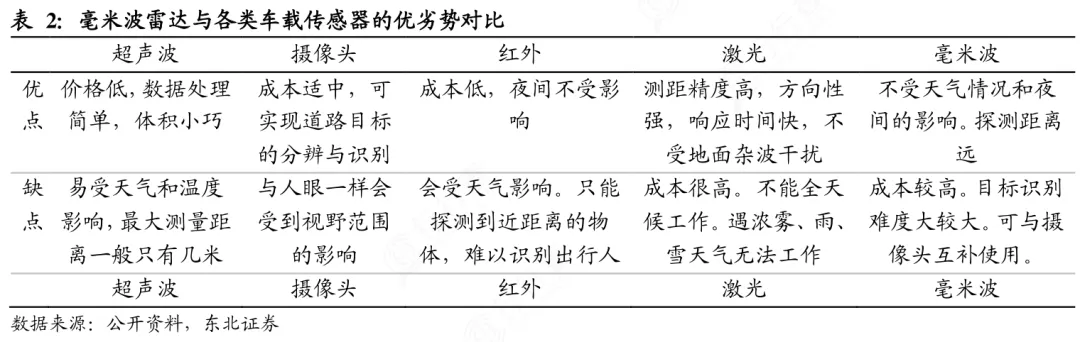
感知系统的能力,首先建立在各类传感器的协同配合之上,不同传感器各司其职,共同完成对周边环境的全方位感知。
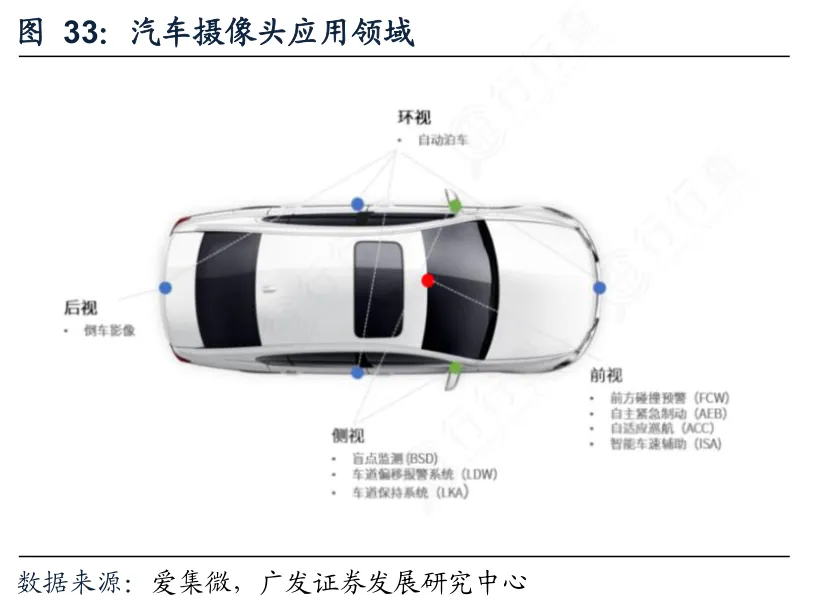
1)摄像头感知:视觉信息采集的核心逻辑
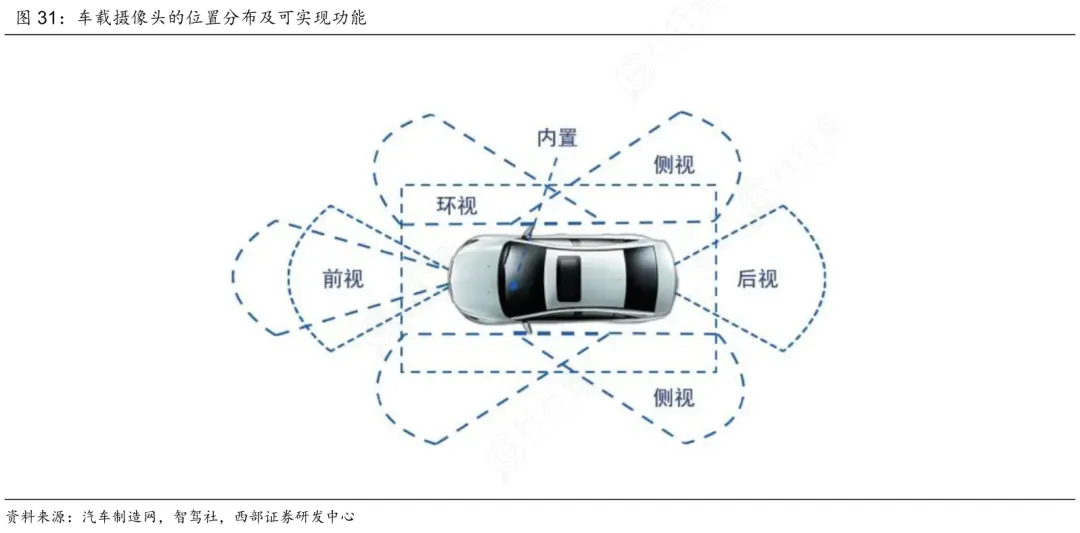
摄像头是通过光学镜头采集二维图像信息,利用图像算法提取画面中的纹理、色彩、轮廓特征,完成交通标志、车道线、行人、车辆等目标的语义识别与分类。

它的优势在于语义信息丰富且硬件成本低、集成难度小,是所有自动驾驶方案的基础配置;但短板也十分明显,无法直接输出深度距离信息,成像效果极易受光线、天气影响。
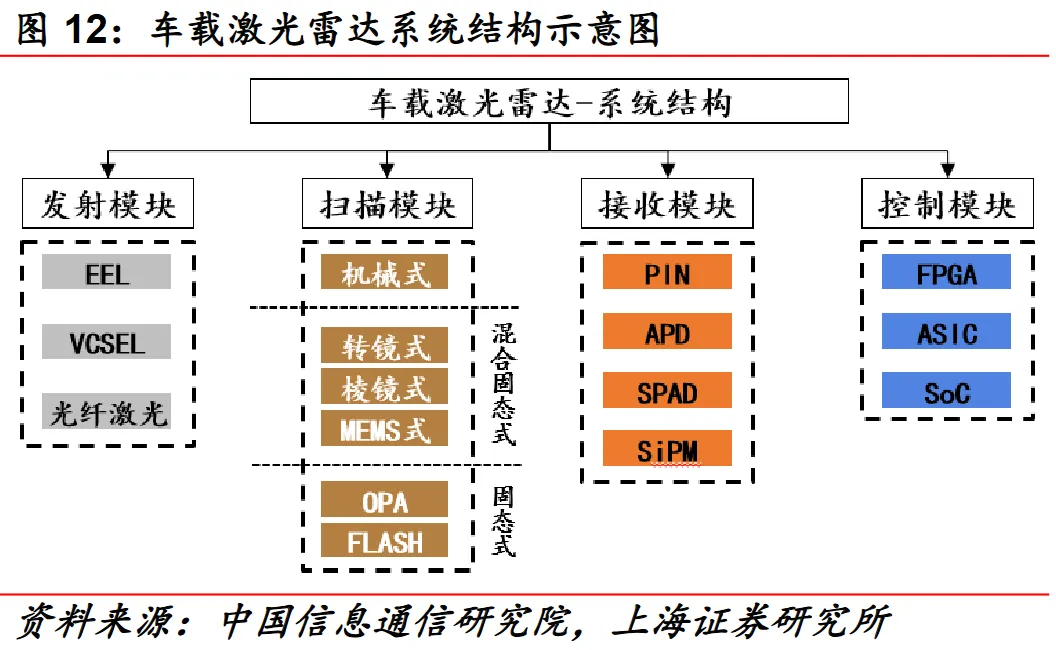
2)激光雷达感知:三维空间建模的关键技术
激光雷达的核心原理是通过发射和接收激光脉冲,计算光的飞行时间来获取目标的距离、方位、高度信息,最终生成周边环境的三维点云模型。
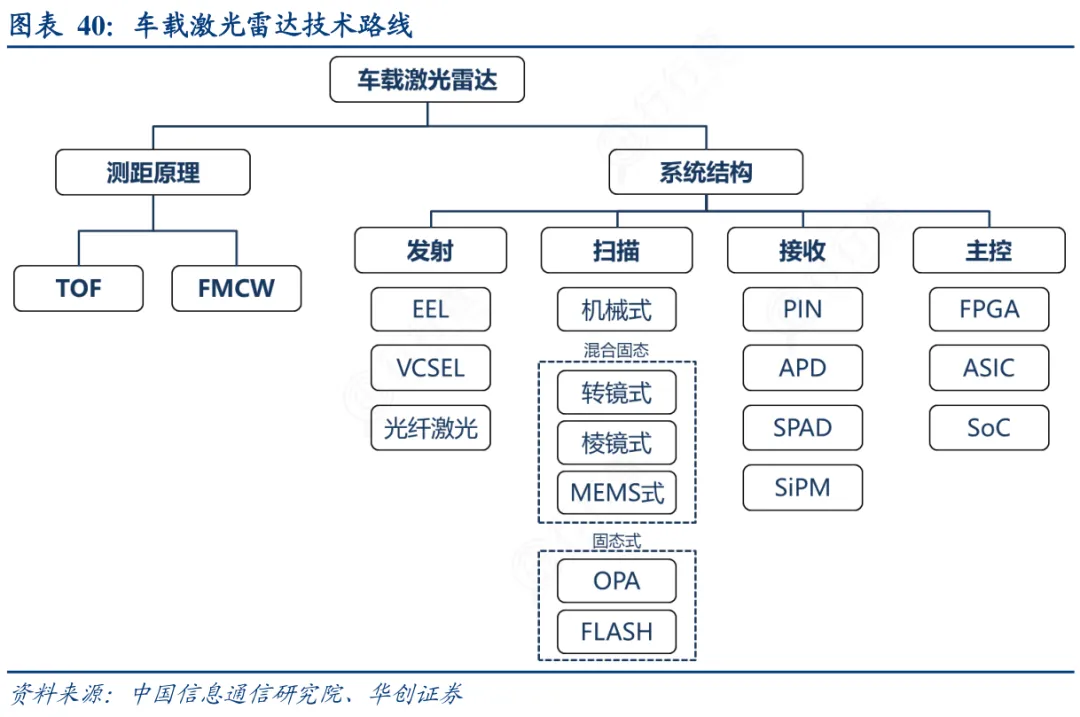
它能精准还原物体的三维轮廓、尺寸和空间位置,测距精度高、抗光线干扰能力强,无论白天黑夜,都能稳定输出精准的空间信息,是高阶自动驾驶实现三维环境感知的核心硬件;但在暴雨、大雾等极端天气下,激光脉冲会被空气中的颗粒物散射,导致感知性能下降。

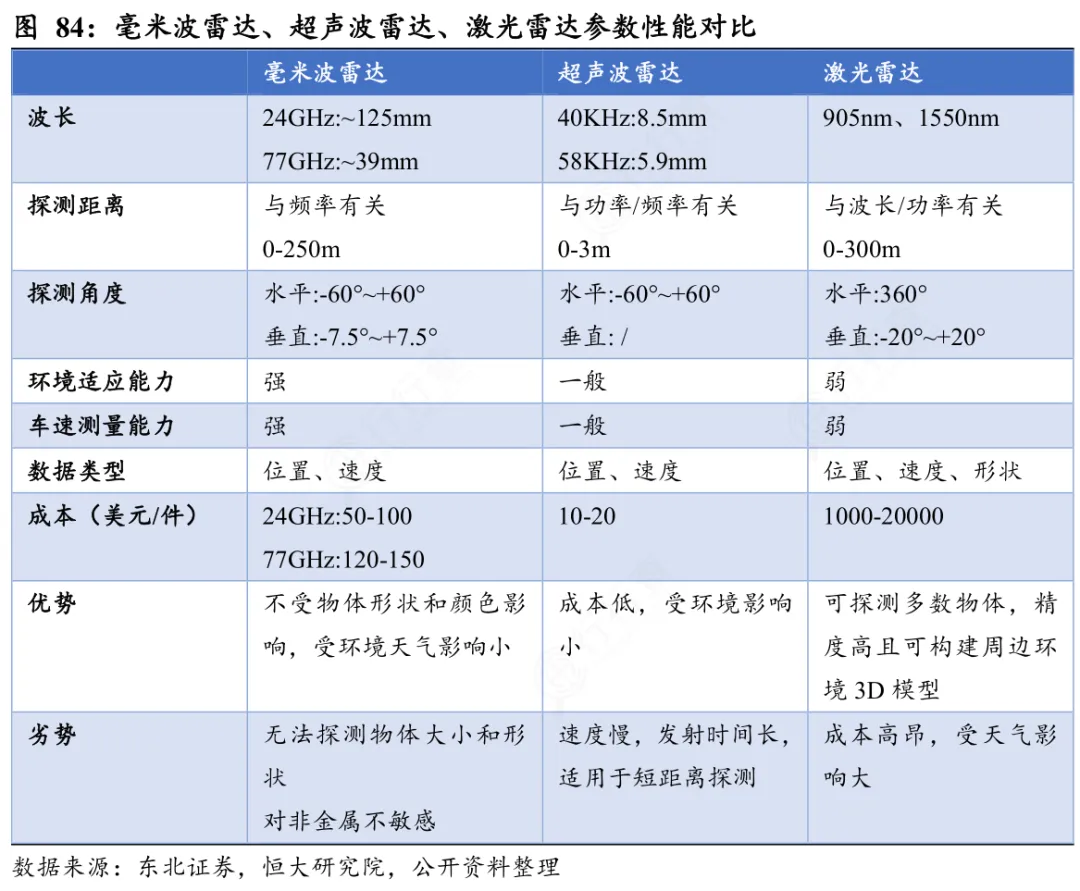
3)毫米波雷达感知:复杂环境下的距离与速度检测
毫米波雷达通过发射毫米波电磁波,利用多普勒效应精准测量目标的距离与相对速度,核心优势在于极强的环境适应性:电磁波能穿透雨、雾、烟尘,不受强光、黑夜影响,在恶劣天气下依然能稳定工作,且对运动物体的速度检测精度极高,是高速场景下跟车、防碰撞功能的核心硬件。
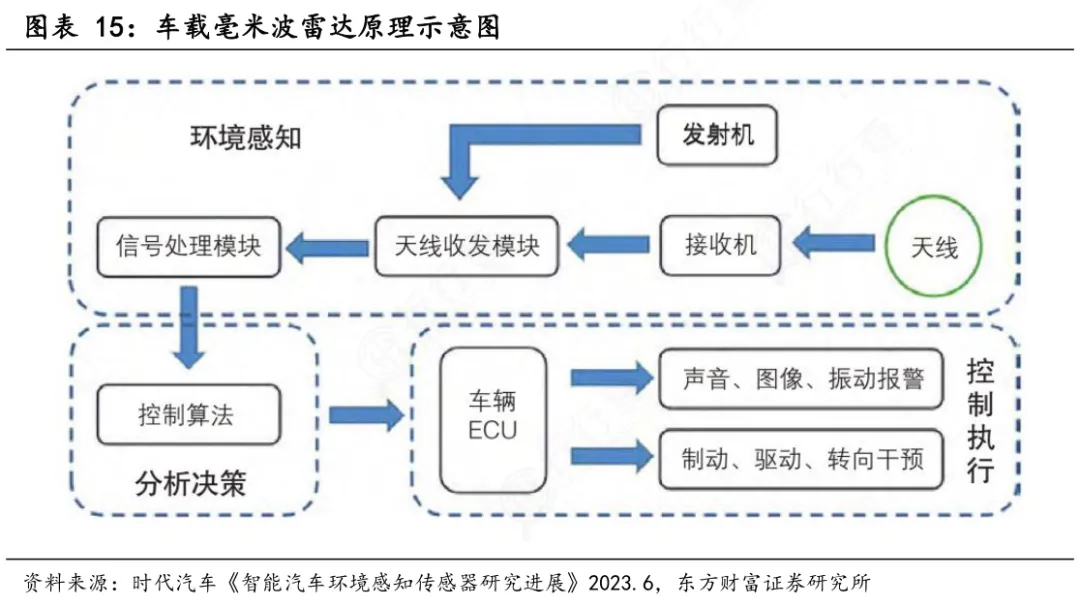
毫米波雷达的短板在于语义识别能力弱,无法区分目标类型,且角度分辨率较低,对静态物体的感知能力有限。
4)超声波雷达感知:近距离场景的补充感知
超声波雷达通过发射超声波并接收反射回波,测算近距离障碍物的位置,核心适用场景是泊车、低速挪车等近距离工况。
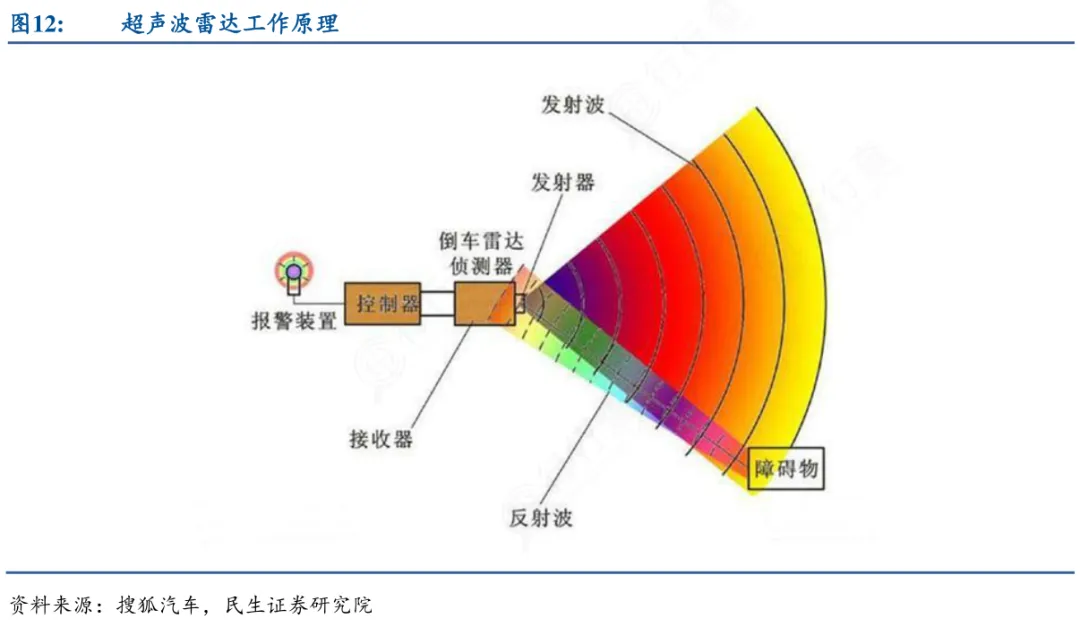
它的硬件成本极低、安装便捷,在几米范围内的近距离测距中表现稳定,能精准识别车身周边的低矮障碍物、墙面等视觉盲区目标。但超声波的传播速度受环境温度影响大,探测距离短,只能作为近距离补充感知硬件。
5)辅助感知传感器(IMU/GNSS等)的协同作用
如果说前四类传感器是车辆的“外部感官”,IMU(惯性测量单元)与GNSS(全球导航卫星系统)就是车辆的“本体感官”。
GNSS通过卫星信号提供车辆的全球绝对定位,IMU则通过惯性器件测量车辆的加速度、角速度、姿态角,输出高频的自身运动状态数据。
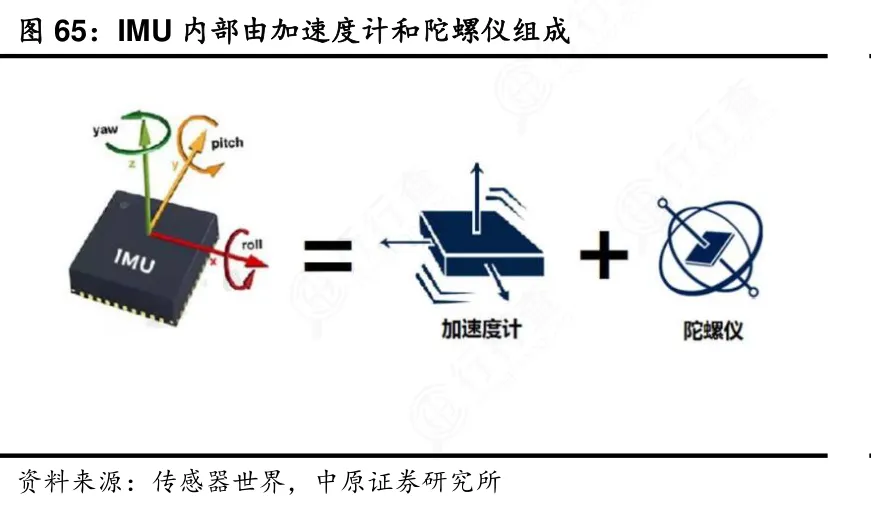
二者的协同作用,一方面为所有传感器提供统一的时空基准,让不同传感器采集的数据能在时间、空间上精准对齐;另一方面能在GNSS信号丢失的场景(如隧道、地下车库)中,通过IMU实现短时的精准定位,填补感知空白。


每天更多热点赛道(AI算力、半导体、机器人、商业航天等)会发布在行业情报站,包含原创的 图文+视频+报告,欢迎加入(每日1v1推送)。 👉🏻产品说明
点击预览捷哥的业情报站

捷哥的行业宇宙
《图解100个产业链》作者
《图解100个商业模式》作者
感知硬件的选型逻辑与场景适配
感知硬件的选型从来不是“堆料”越多越好,而是围绕自动驾驶级别、应用场景、成本约束,找到最优的解决方案。
自动驾驶级别(L2-L5)的要求差异
自动驾驶的级别越高,对感知系统的安全冗余、精度、鲁棒性要求就越严格。
L2级辅助驾驶核心功能是自适应巡航、车道保持,仅需完成有限场景的辅助感知,主流方案以摄像头为核心,搭配毫米波雷达与超声波雷达即可满足需求。
L3级有条件自动驾驶,需要系统在特定场景下完成全部驾驶操作,对感知的冗余性要求大幅提升,通常会增加激光雷达作为核心感知硬件。
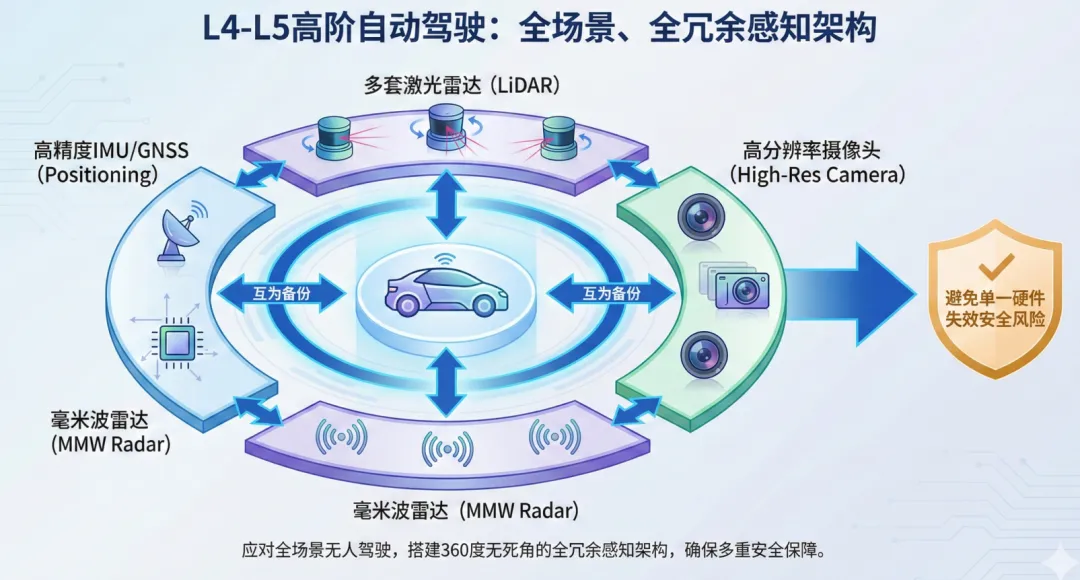
而L4-L5级高阶自动驾驶,需要应对全场景的无人驾驶,必须搭建360度无死角的全冗余感知架构,多套激光雷达、高分辨率摄像头、毫米波雷达、高精度IMU/GNSS互为备份,避免单一硬件失效带来的安全风险。
(图片由AI生成)
不同应用场景下的选型差异
感知硬件的选型,永远要贴合场景的核心需求。
家用乘用车的使用场景覆盖城市道路、高速、泊车,需要兼顾成本、性能与乘坐体验,选型逻辑是在安全合规的前提下,平衡成本与功能覆盖。

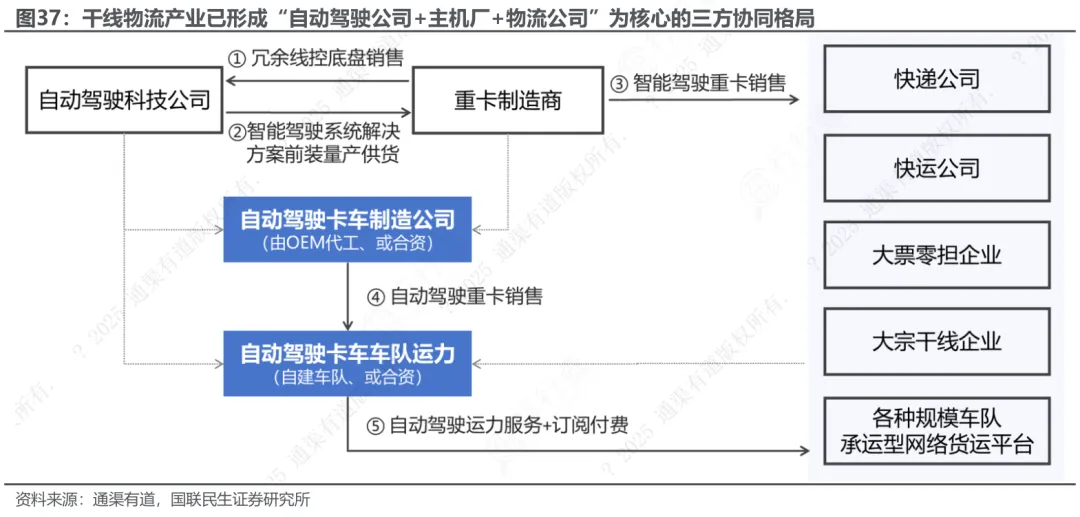
干线物流商用车的核心场景是高速封闭道路,车速快、载重高,对远距离感知、速度检测、纵向测距的要求极高,更侧重长距激光雷达、远距离毫米波雷达的配置。
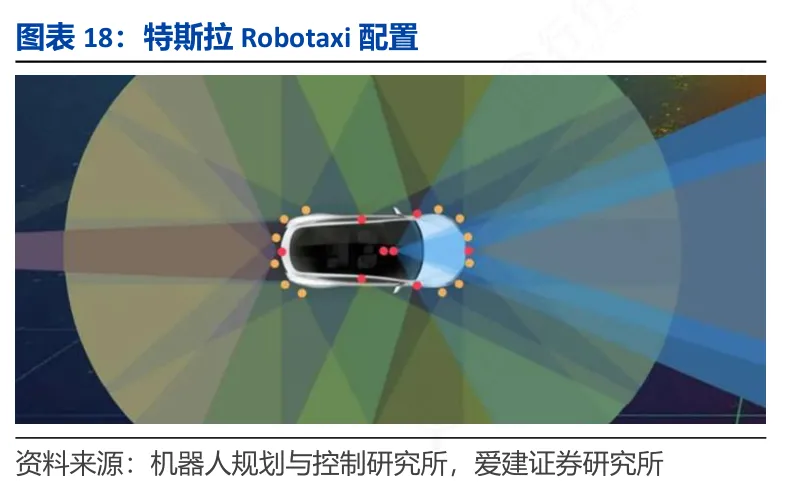
Robotaxi的运营场景是城市开放道路,工况最复杂、安全要求最高,且对成本的敏感度相对较低,选型逻辑优先保障全场景的感知冗余与鲁棒性,通常会搭载最全的传感器配置,实现无死角的环境感知。
自动驾驶感知硬件市场规模
激光雷达
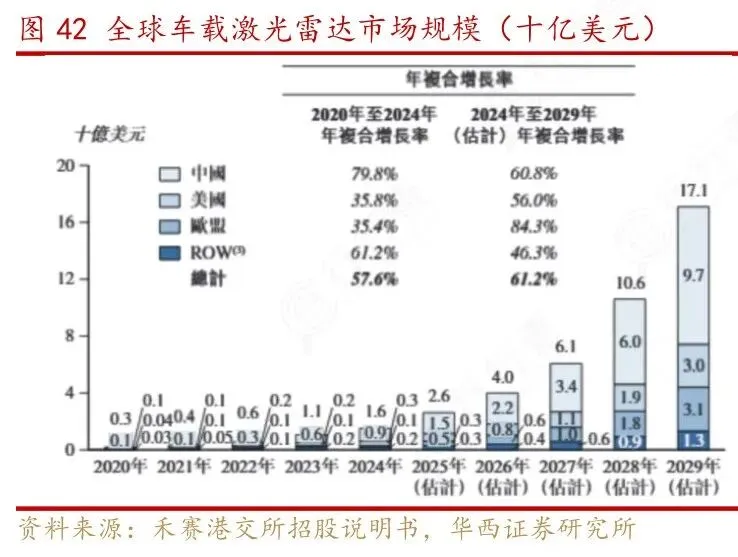
根据禾赛港交所招股书数据,2025年全球车载激光雷达硬件市场规模约为26亿美元,预计2029年有望增长至171亿美元,2024-2029年CAGR超过60%。
(数据日期:2025-10)
根据弗若斯特沙利文的预测,到2026年,中国激光雷达市场规模将达到431.8亿元。其中,高级辅助驾驶中激光雷达应用将占据市场大头,2025年市场规模预计突破50亿元,同比增速接近50%。
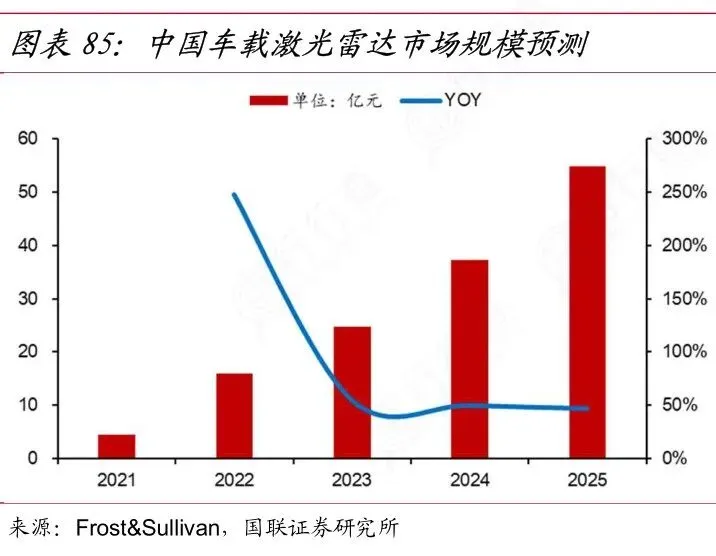
(数据日期:2024-11)
超声波雷达
根据QYResearch数据,2025年全球车载超声波雷达市场规模预计达6.95亿美元,2031年将突破10亿美元,2025-2031年间的CAGR为7.9%。
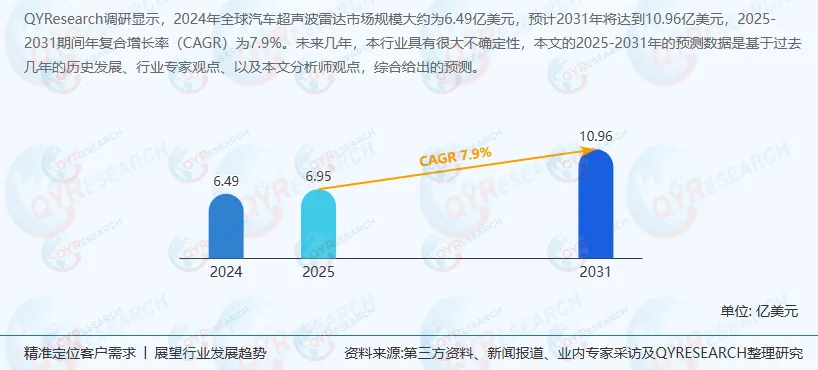
(数据日期:2025-12)
毫米波雷达
根据QYResearch数据,2025年全球车用4D成像雷达(高阶毫米波雷达)市场销售额达13.74亿元,行业增长势头迅猛。预计到2032年,该市场销售额将飙升至409亿元,2026-2032年CAGR高达63.3%。
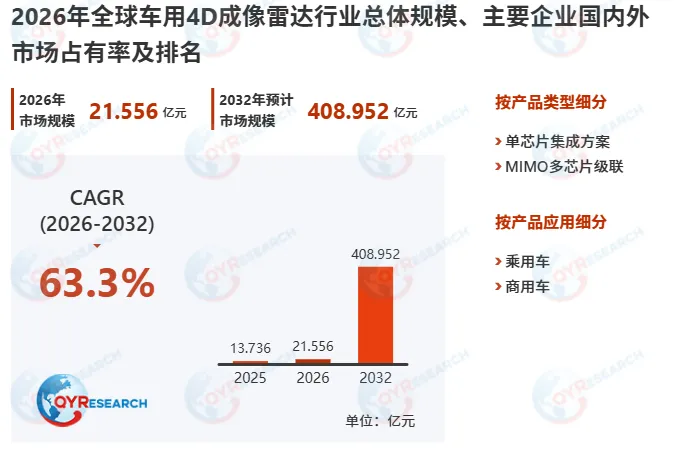
(数据日期:2026-2)
根据ICV Tank数据,2025年中国车载毫米波雷达市场规模将达到约30亿美元,2027年或将增至近40亿美元。
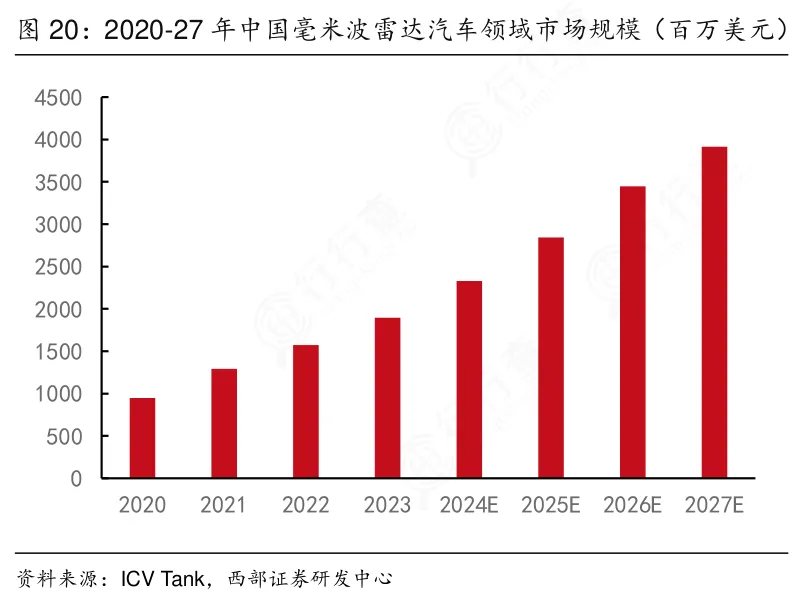
(数据日期:2025-2)
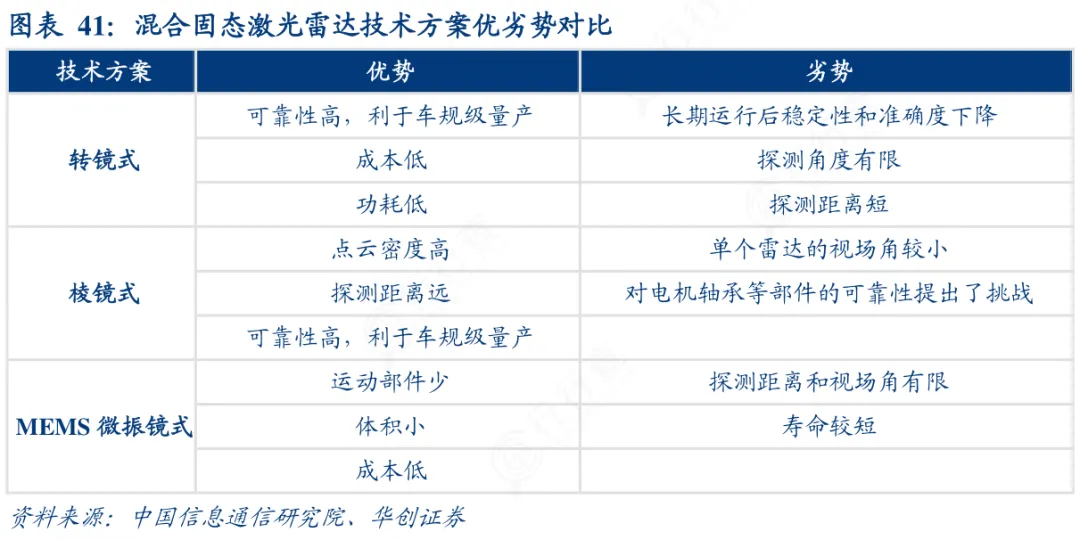
感知技术的发展方向
当前,自动驾驶感知技术正朝着集成化、智能化、全场景化的方向快速迭代。
硬件层面,传感器的固态化、集成化是核心趋势,固态激光雷达、4D毫米波雷达等新型硬件快速成熟,在提升性能的同时大幅降低成本,推动高阶感知方案的规模化落地。
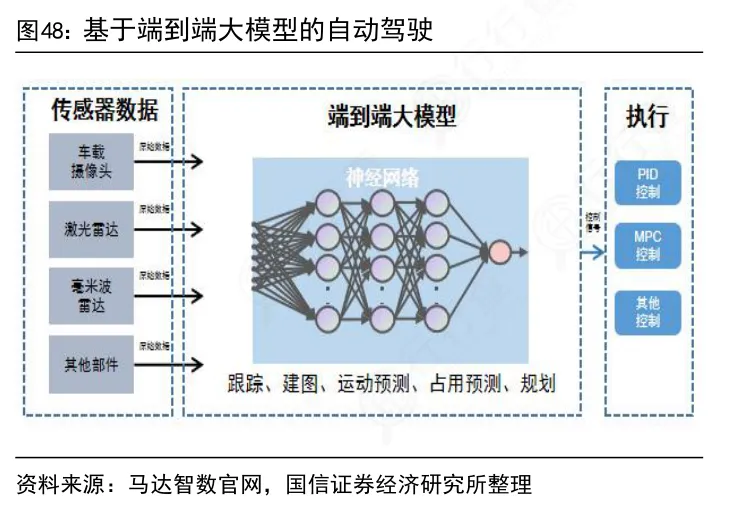
算法层面,基于大模型的感知算法,拥有极强的泛化能力,能有效应对海量的长尾场景,打破传统算法的场景边界;端到端的感知架构,将感知与决策、控制链路打通,大幅降低系统延迟,提升全链路的运行效率。
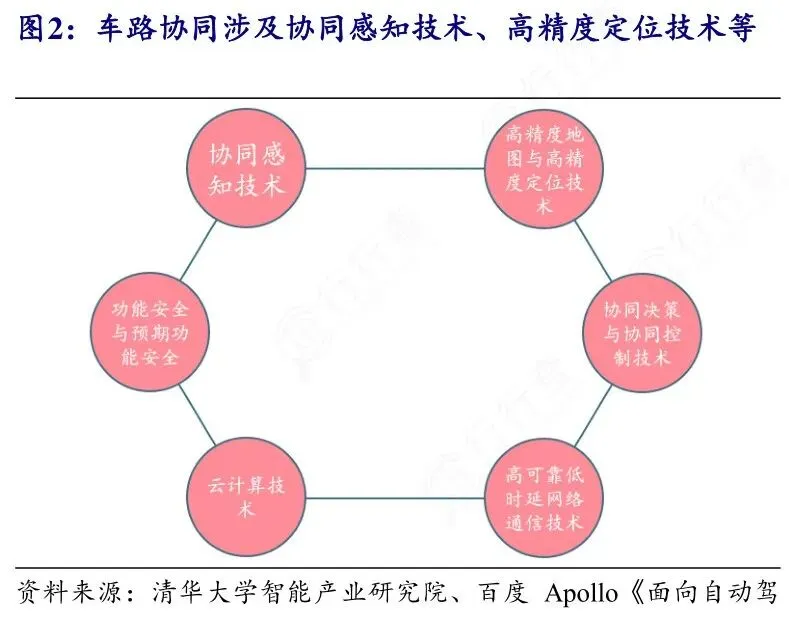
同时,车路协同感知正在成为重要的补充方向,通过路侧传感器与车端感知的融合,填补车端的感知盲区,提升复杂路口、遮挡场景下的感知能力。
(公开资料整理,行业研究分享,勿做投资建议)

每天更多热点赛道(AI算力、半导体、机器人、商业航天、固态电池等)会发布在行业情报站,包含 图文+视频+报告,欢迎加入。 👉🏻产品说明
(END)
- 作者介绍 -
联系方式:jaydata888

捷哥的行业宇宙
《图解100个产业链》作者
《图解100个商业模式》作者
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 10万级轿车的销量黑马:小鹏 MONA M03,凭的到底是什么?
- 现代又成功了!合资家用紧凑型轿车只售 9.98 万,31 天大卖 17826 辆,油耗 4.2L 超省心
- 江西高速交警通报大广高速车祸:小轿车上一人死亡
- 8万多落地的插混轿车,到底能不能买?我实拍了这台**银河L6 25款低配**
- 12万多买1.8T+8AT的中型轿车,东风雪铁龙C6到底香不香?
- 5-6万买手动轿车到底值不值?我看完奇瑞艾瑞泽5 1.5L手动风尚版,结论很直接:**能买,但别幻想“越级”**
- 方程豹首款轿车!配半隐藏式门把手!路试谍照曝光!预计年内发布!
- 比亚迪腾势豪华行政旗舰轿车概念图
- 连续六个月霸榜的10万级纯电轿车,小鹏MONA M03到底凭啥?我实测完给你结论
- 自动驾驶实现又一重大突破!
