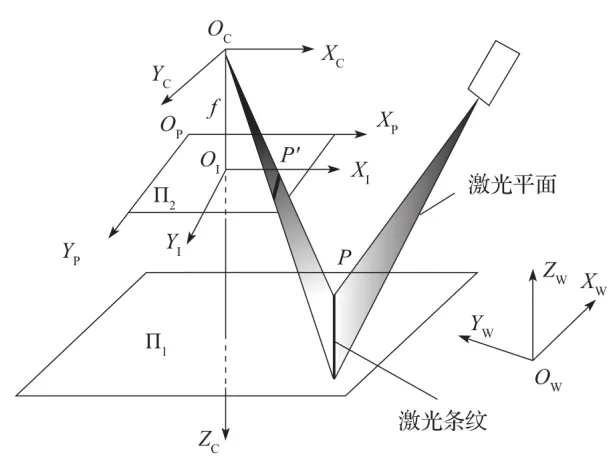
如下图所示,根据参照物不同,自动驾驶中的坐标系主要分为像素坐标系、图像坐标系、相机坐标系和世界坐标系,不同的传感器对应不同的坐标系及数据类型。这四个坐标系是视觉几何与相机成像的基础,定义了空间中的点是如何被投影到照片上的。它们之间通过刚体变换、透视投影和仿射变换层层递进。

1. 四个坐标系的定义
像素坐标系 : 像素坐标系是图像的离散表示,其中每个点(像素)都用整数坐标表示,用于定位像素位置。在下图中,像素坐标系的原点在左上角,x轴从左向右递增、y轴从上向下递增,为左手坐标系。最终得到的图像以像素坐标系表示,标记为。最终在计算机中存储的图像,以左上角为原点, 轴向右, 轴向下。单位是像素(pixel)。
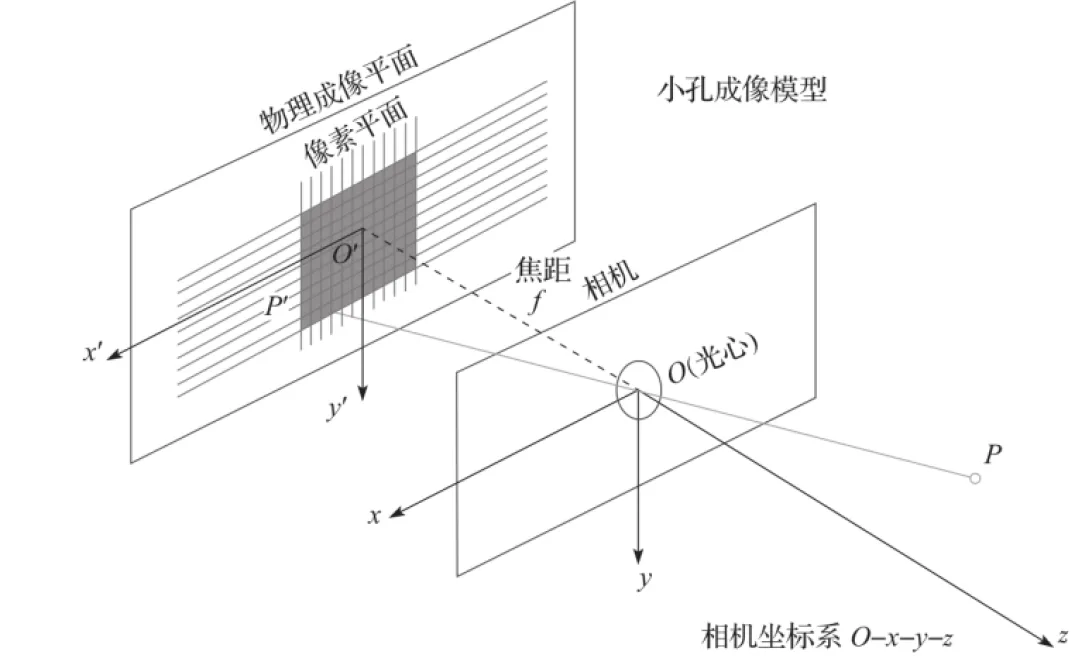
相机坐标系 : 相机坐标系记为, 原点设在相机的聚焦中心,其中光轴被设为轴。如上图所示,坐标原点位于光心、轴朝向前方、轴指向右侧、轴指向下方,为右手坐标系。相机利用小孔成像原理,将真实世界中的影像投影到成像平面,此平面在物理世界中是真实存在的,拥有对应的物理尺寸,通常比较小。单位是毫米(mm)。
图像坐标系 : 为了能够定量描述三维空间到二维图像的映射关系,图形学里引入了图像坐标系。该坐标系是相机坐标系的一个平移,它的中心仍在相机主光轴上,距离光轴中心的距离等于相机的焦距。在实际中,相机会在光轴中心后方的底片上形成一个缩小的倒像,这是实际的像平面。为了方便分析和计算,会在光轴中心前方设立一个虚拟的像平面,该像平面上会呈正像,大小与真实倒像相同。
世界坐标系 : 客观世界的绝对坐标系,用来描述物体在真实场景中的位置。单位通常是米(或米制单位)。
2. 坐标系间的转换关系
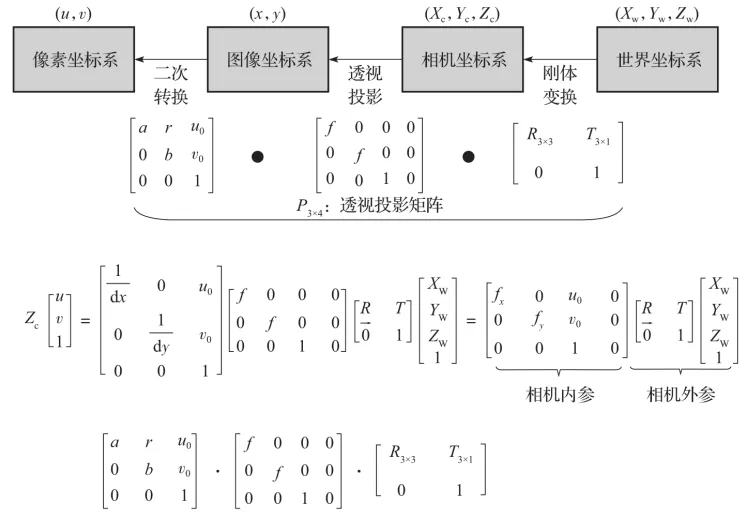
整个成像过程可以总结为:世界坐标相机坐标图像坐标像素坐标。
第一步:世界坐标系 相机坐标系(刚体变换)
这一步是三维到三维的变换,包含旋转和平移,不会发生形变。
式中: 是 3x3 旋转矩阵, 是 3x1 平移向量。
第二步:相机坐标系 图像坐标系(透视投影)
这是从三维到二维的转换,利用小孔成像原理(不考虑畸变时使用相似三角形)。空间点 投影到物理成像平面上的点 :
式中:表示相机焦距,、表示图像坐标系下的横轴和纵轴坐标,、、表示相机坐标系下的3个轴坐标。
用齐次坐标表示为:
第三步:图像坐标系 像素坐标系(离散采样)
物理单位(如毫米)的像,最终转换成由像素组成的数字图像。设每个像素在 方向的物理尺寸为 , 方向为 ,图像坐标系原点在像素坐标系中的坐标为 :
式中:、分别代表每个像素在x轴和y轴方向上的物理尺寸(单位:毫米/像素)。
用矩阵表示(考虑 和 轴可能不垂直,引入倾斜参数,现代相机中 通常为0):
式中:表示图像上每个像素在成像平面上所对应的坐标;()对应像素坐标系中的坐标。
3.世界坐标系 像素坐标系
将以上三步合并,可以得到总的投影方程(忽略了相机畸变的理想模型):
将前两个矩阵(相机内参)合并,通常写为:
其中:
- 内参矩阵 :包含焦距 、像素尺寸 、主点 ,是相机的固有属性。
- 外参矩阵 :由旋转矩阵 和平移向量 组成,代表相机在世界坐标系中的位姿。