本文论述USS的工程实践过程
1、系统方案设计需求和USS设计的匹配
当前基本都是采用AK2的设计方案,选用Murata的Transducer和elmos 的超声IC。
1.1 超声换能器
领先的电子产品制造商村田制作所 (Murata) 今日宣布推出一款专为汽车应用设计的新型超声波传感器 MA48CF15-7N。该传感器灵敏度高、响应速度快,采用全密封封装,可有效防止液体渗入。
随着车辆设计逐渐融入更高水平的自主性,更精确的短距离/中距离物体探测机制将不可或缺。通过发射超声波并检测其反射,可以确定物体的存在,并测量其距离。
MA48CF15-7N 能够覆盖从 15 厘米到 550 厘米的宽广检测范围,并具有极高的障碍物检测精度。它能够产生 120° x 60° 的光束。1100pF±10% 的电容(1kHz 时)是另一个重要特性,其较小的偏差意味着无需调整变压器。
谐振频率为48.2±1.0kHz,Q值为35±10,从而提高了可用性和温度性能。与村田之前的型号相比,这两个参数的公差降低了50%,从而显著降低了单个单元的检测特性差异。

图1 MA48CF15-7N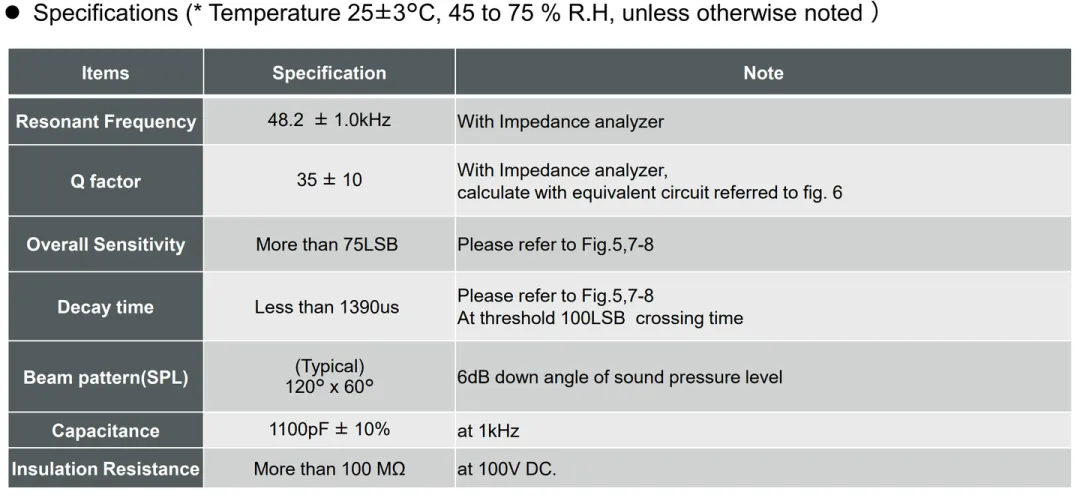 图2 MA48CF15-7N Spec
图2 MA48CF15-7N Spec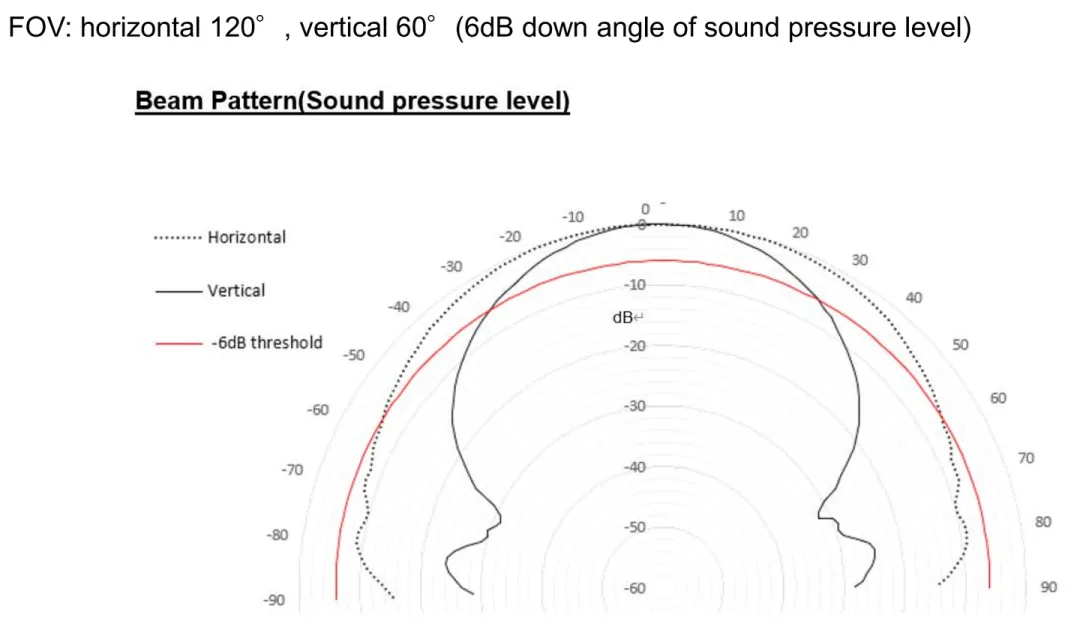 图3 MA48CF15-7N FOV
图3 MA48CF15-7N FOVRef:https://www.murata.com/en-eu/products/sensor/ultrasonic/overview/lineup/proof
1.2 超声IC
Elmos E524.17:https://www.elmos.com/english/products/sensor-ics/ultrasonic-distance/dsi3-or-pt-to-pt-interface/e52417-1.html
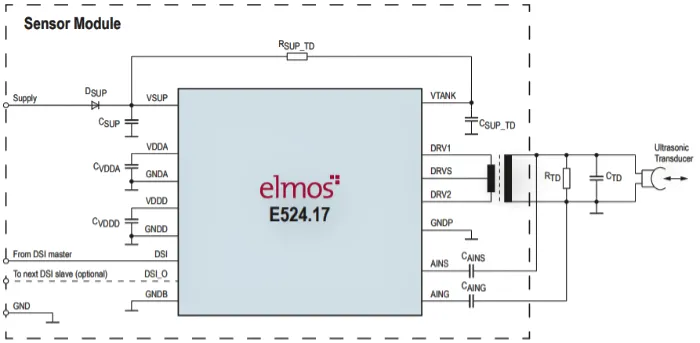 图4 E524.17
图4 E524.171.3 UPA和APA的归一化
Ref:https://www.murata.com/-/media/webrenewal/campaign/events/asean/2024/mie-tech-day/ultrasonic-sensor.ashx?la=en-sg&cvid=20240428074526000000
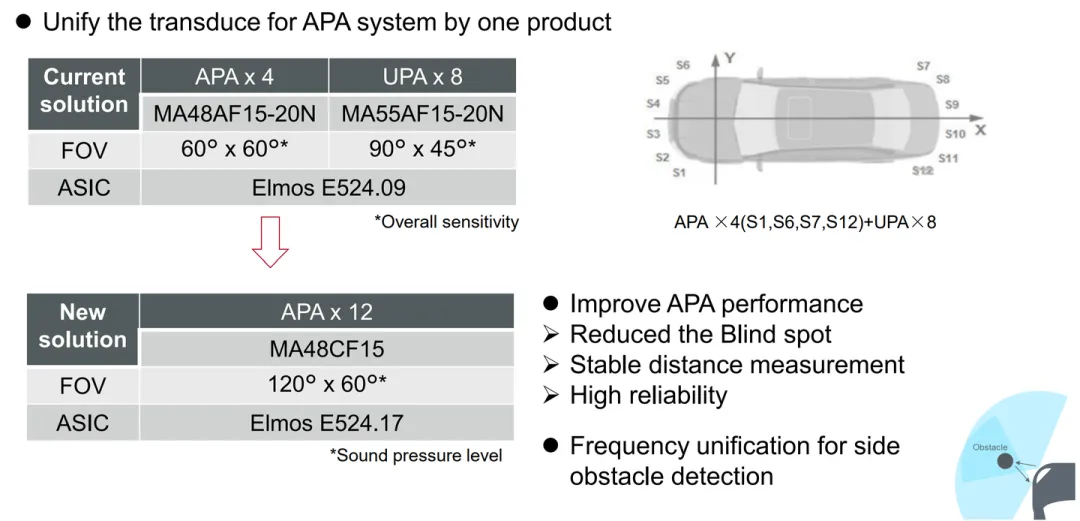 图5-1 APA和UPA的换能器归一化
图5-1 APA和UPA的换能器归一化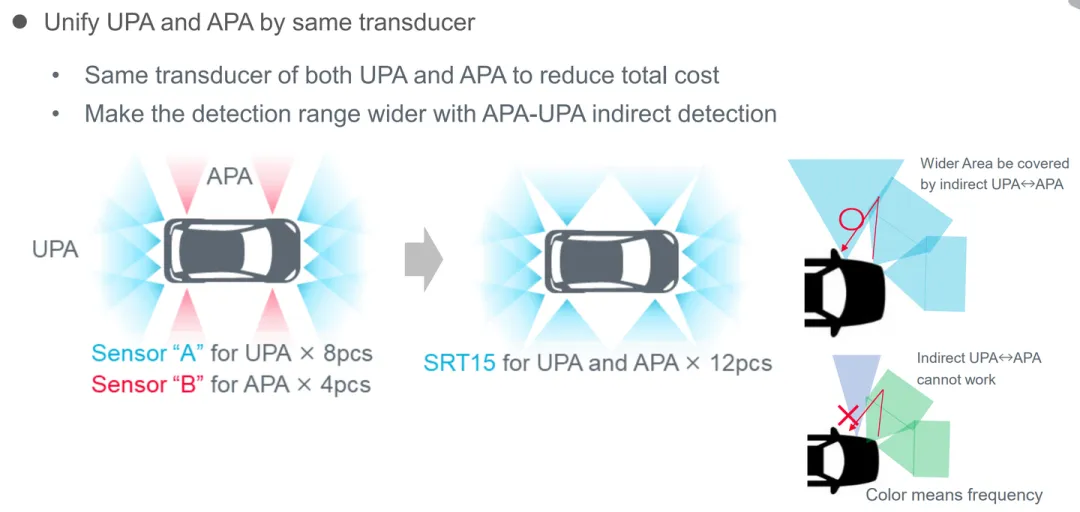 图5-2 APA和UPA的换能器归一化
图5-2 APA和UPA的换能器归一化2、实时矫正测距与定位设计
实时矫正测距与定位方法主要是对系统的多路超声波雷达设计合理的发波时序,融合温度矫正、时间同步矫正、环境自适应矫正,可在情况复杂的环境中实现更加准确的测距与定位。
Ref:https://m.fx361.cc/news/2022/0623/10776964.html
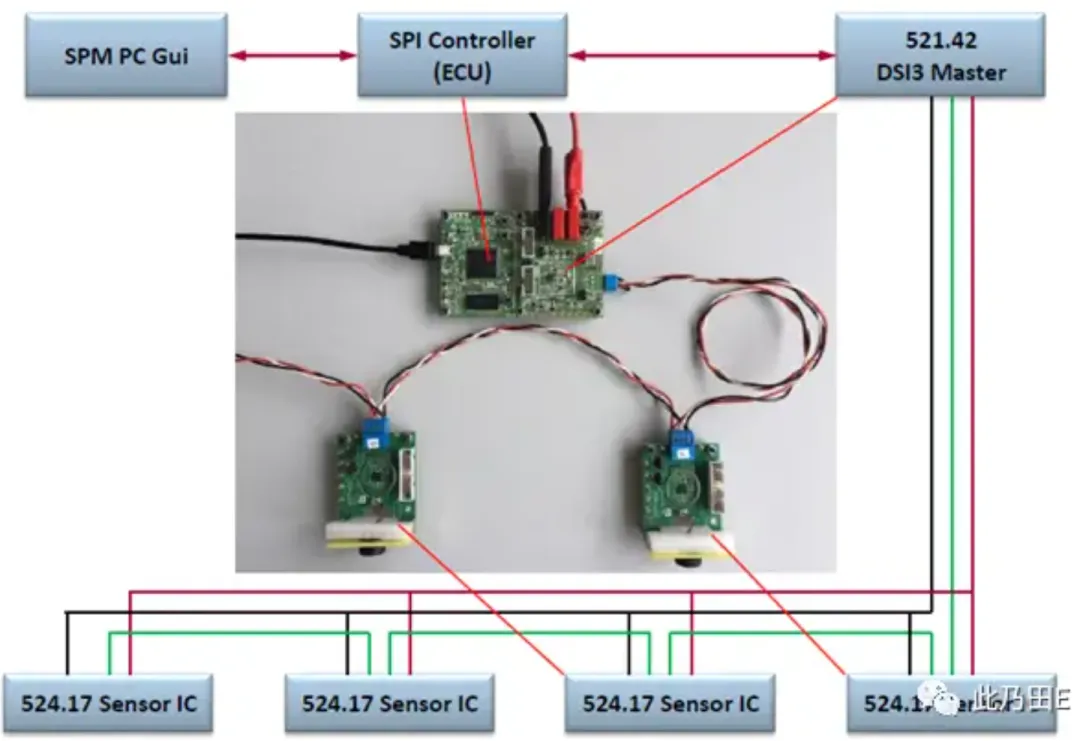 图6 系统架构demo
图6 系统架构demo2.1 IC 参数配置
新一代超声波雷达专用芯片 - E524.17
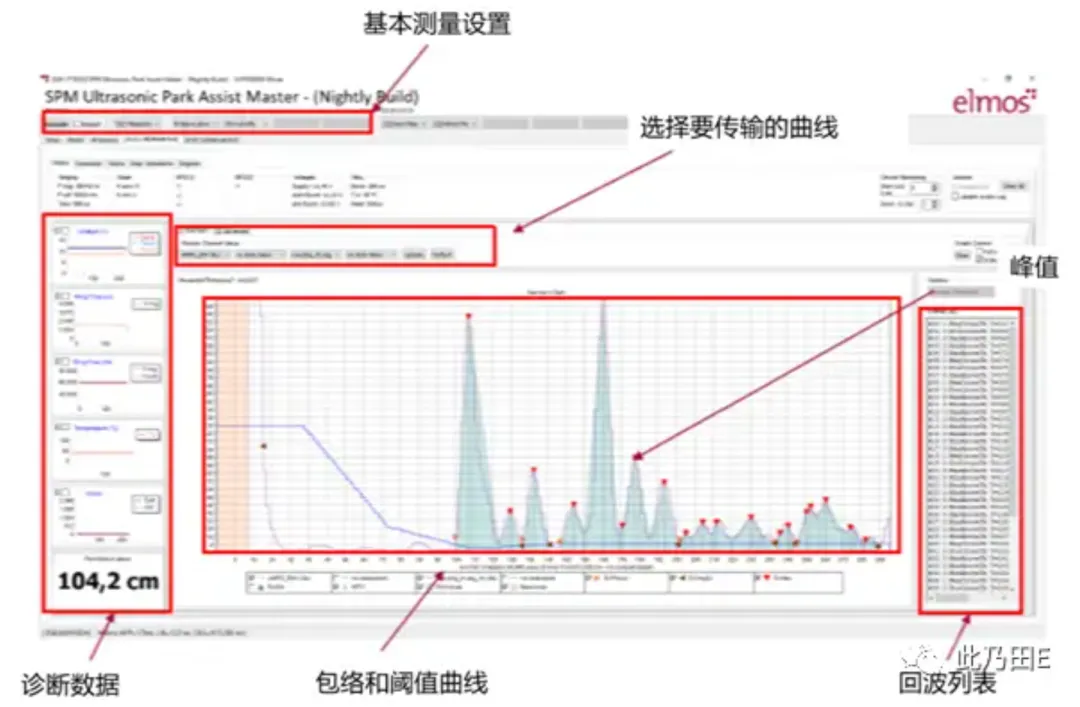
图7-1 elmos开发上位机软件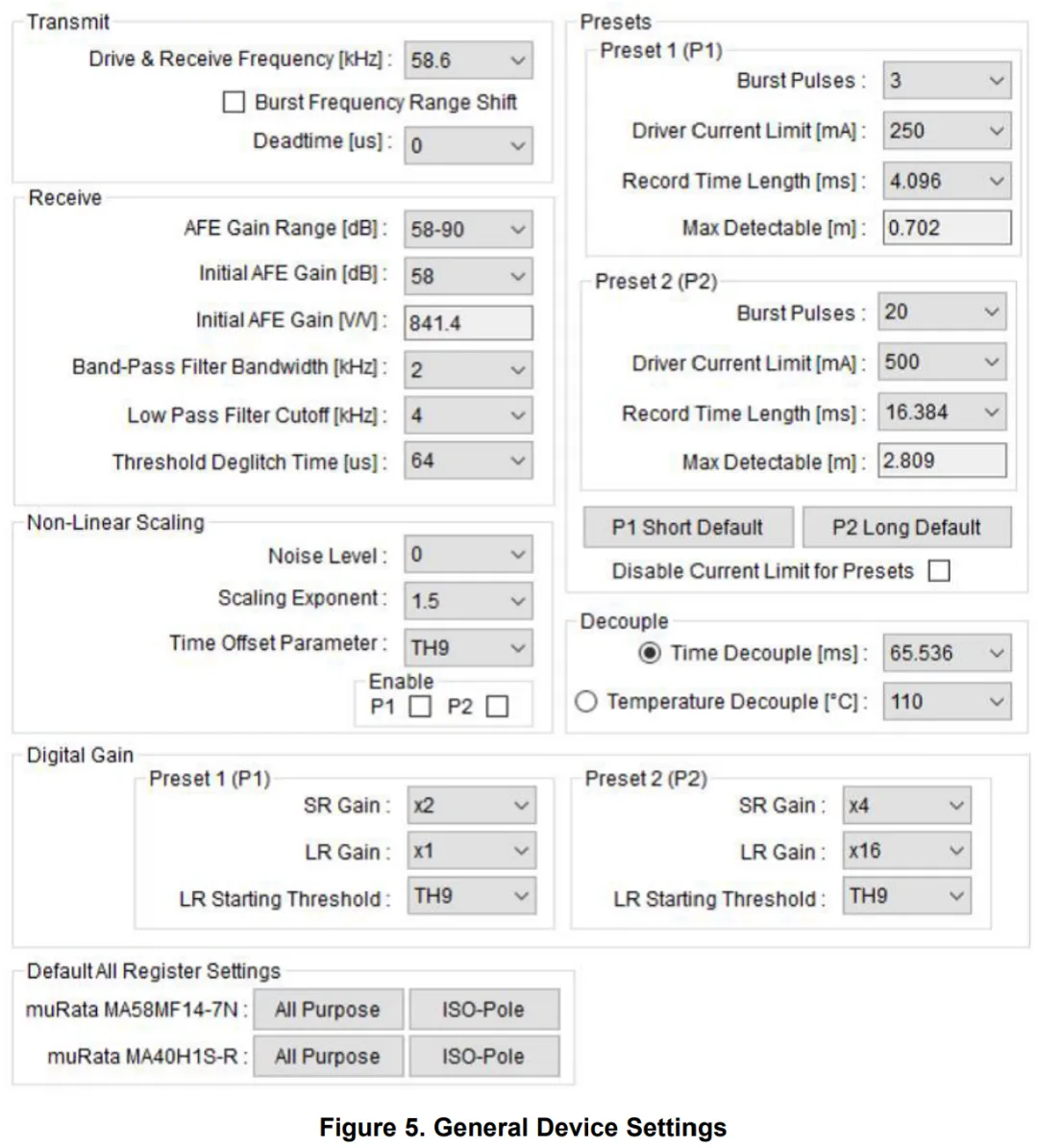 图7-2 超声IC设置
图7-2 超声IC设置Ref:https://www.ti.com/lit/ug/tidudo4/tidudo4.pdf?ts=1759196080998&ref_url=https%253A%252F%252Fwww.google.com%252F
利用elmos 开发的上位机软件实现对超声波雷达的回波信号探测与参数配置,碎石路面回波探测图如下图所示。横坐标表示距离,纵坐标表示回波强度,红色线条代表设定的阈值曲线,绿色线条代表回波信号,蓝色线条代表IO 高低电平信号。当回波信号高于阈值曲线时,IO 线被拉低,此时MCU 即可检测到障碍物。阈值可通过上位机软件进行配置,以获得准确的回波检测结果。下图中未设置目标障碍物,用来观测复杂路面对障碍物的回波影响。由下图可见,在2000 mm 和2600 mm 处碎石回波信号较大,有较大可能对障碍物的检测造成影响,所以需要提高相应阈值及优化IC 的滤波降噪配置。
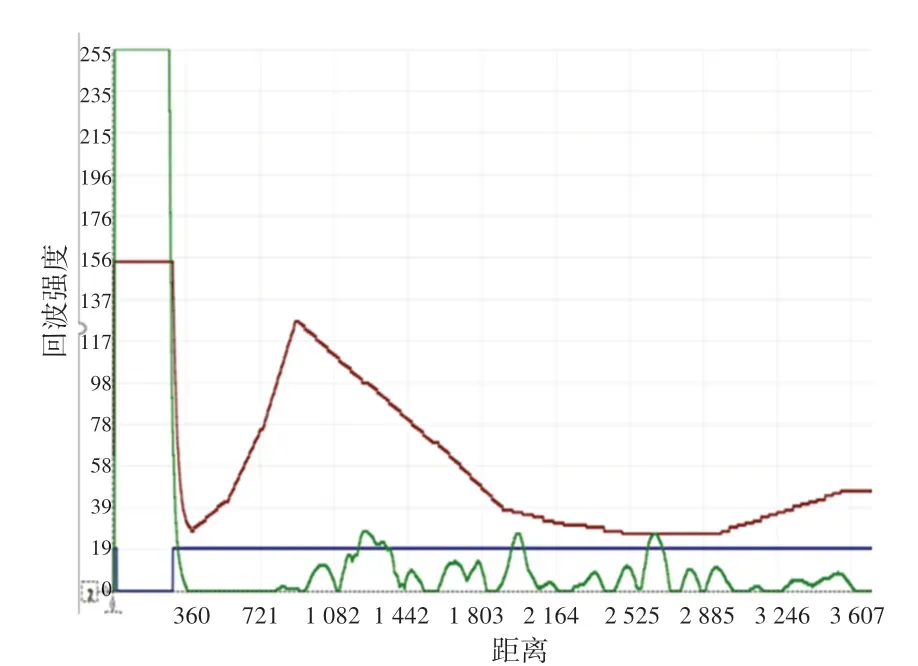
图8 碎石路面回波信号检测改变阈值参数和滤波降噪都是通过elmos 的开发板利用JTAG 接口对IC 内部寄存器和EEPROM进行配置,最终得到一组理想配置参数。经过多次参数配置,最终同样在碎石路面放置标准PVC 管,回波信号如下图所示。经过配置合理的阈值、滤波降噪后,碎石的回波信号衰减较强,同时可在2500 mm 的位置依然可稳定检测到PVC 管回波信号。
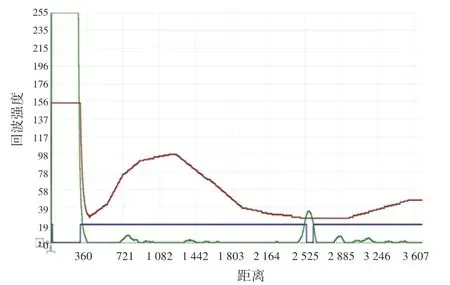 图9 优化后碎石路面远距障碍物回波信号检测
图9 优化后碎石路面远距障碍物回波信号检测优化后碎石路面近距障碍物回波信号检测结果如下图所示。声波强度随时间逐渐减弱,上图的2500 mm 处和下图的1400 mm 处回波信号形成明显对比,距离越远、回波信号越弱,因此为了能适应近、中、远距离的最优测量,需要设计合理矫正算法。
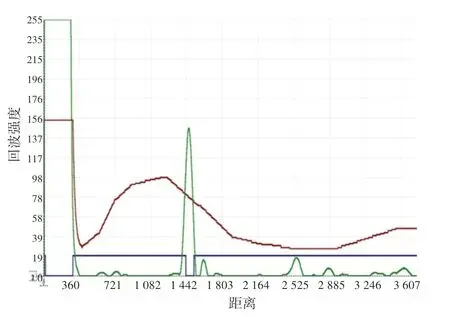
图10 优化后碎石路面近距障碍物回波信号检测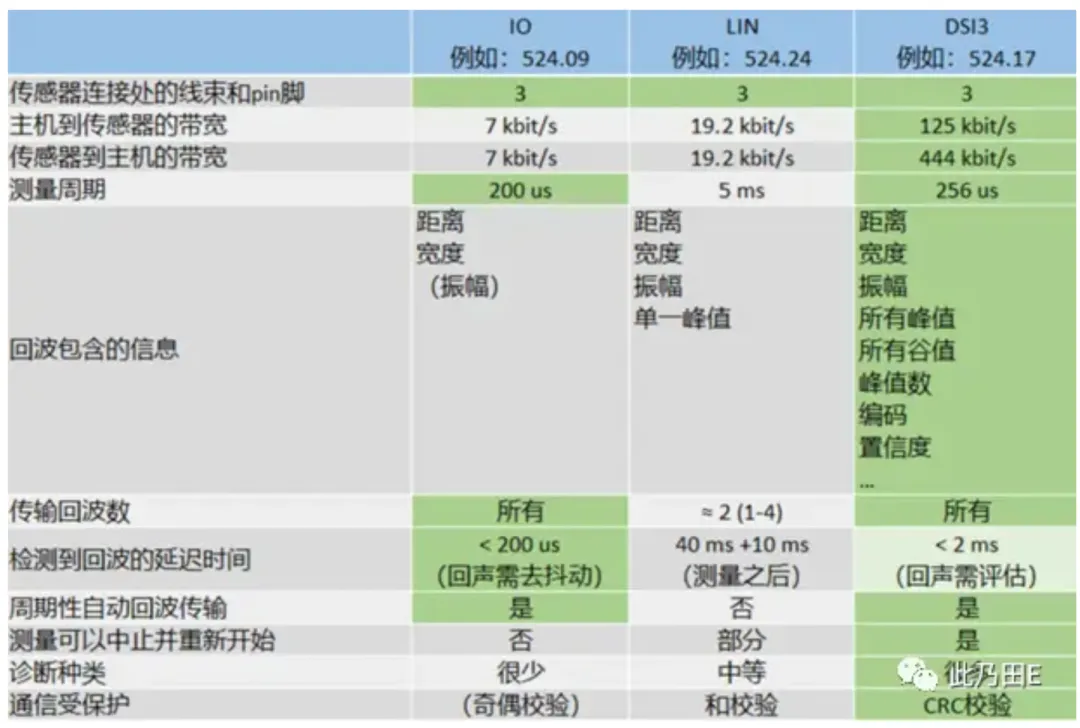 图10 elmos DSI3 回传信息
图10 elmos DSI3 回传信息 图11 DSI3的总线连接和P2P连接
图11 DSI3的总线连接和P2P连接通过对超声波雷达端IC的配置,得到的回传信息如图10所示,实际上的测距算法等已经在超声波雷达中通过之前的参数配置调整自动完成了。系统端的MCU只需要对DSI3回传的这些信息进行处理完成各种后端算法即可。
2.2 实时矫正算法设计
温度矫正:超声波速率受环境温度影响极大,温度每变化1 ℃,速度变化0.6 m/s,进而影响对障碍物的检测。
当前环境温度由超声波雷达的温度和车辆外部温度融合,前者温度可由MCU 发送温度获取命令取得,车辆外温通过CAN 总线获取。设定5 s 获取一次超声波雷达温度,设置冗余机制,同时获取多个超声波雷达温度,设定所得各传感器温度偏差在10%范围内数据有效。最终温度可以去超声波雷达温度和环境温度的均值。
时间同步矫正:由于MCU 驱动多个超声波雷达会产生计时不同步的问题,导致测距精度降低,所以需要设计时间同步矫正算法。具体根据各家设计方案进行。
以下是一个同步校准算法的流程
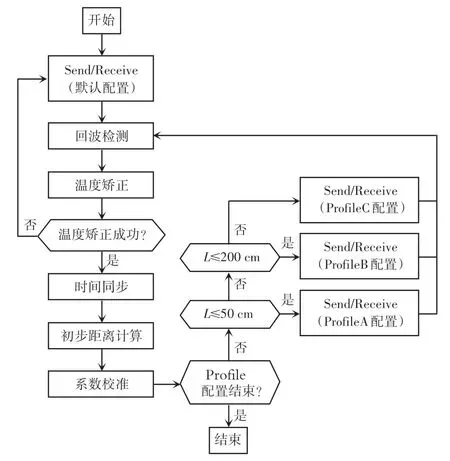 图12 实时矫正算法逻辑流程图
图12 实时矫正算法逻辑流程图3、目标定位算法
定位原理设计如下图所示,展示了一发三收的定位原理,图中只展示2 个目标物用来示意,可实现左、右两侧多目标同步定位。在实际情况中,由于超声波呈不规则锥形包络线发射,同一物体在声波反射的可探测角度内可探测其多个部位。在二维坐标系中,O设置为自发自收探头位置、并设置为坐标原点,A、B为只收探头位置,探头之间位置OA、OB由安装位置已确定。距离a、b、d的值可由超声波测出,目标物1 的位置可由余弦定理得出:
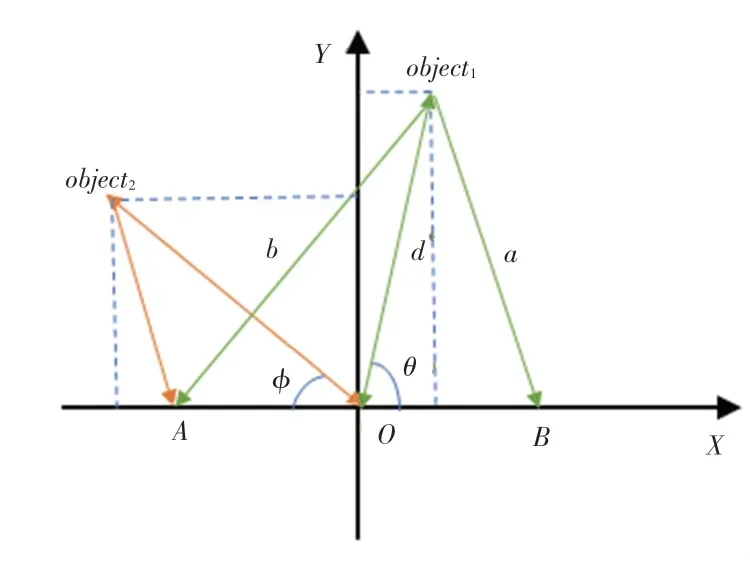
图13 定位原理设计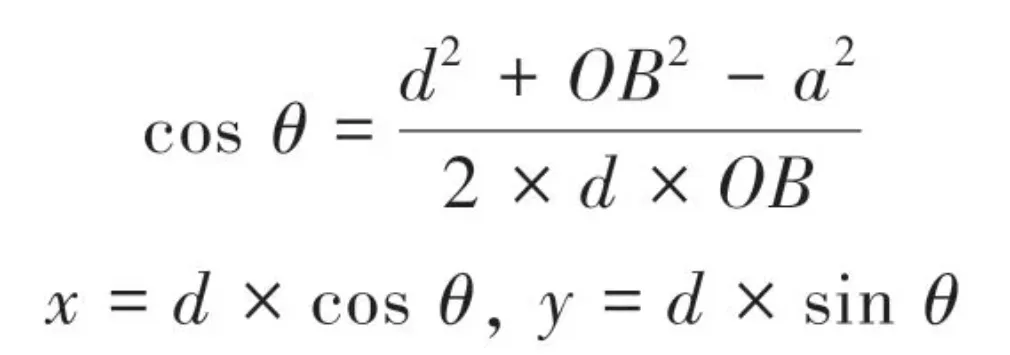 图14 目标的二维坐标求解
图14 目标的二维坐标求解4、发波时序设计
采用的超声波雷达有2 种测量模式,分别是:自发自收和不发只收。
为了更加准确定位障碍物,可利用一发多收的方法实现三角定位。为了避免相邻探头发波的干扰、同时提高测距定位的效率,设计合理的发波时序。前后8 个短距超声波探测距离为15~250 cm,用来避撞;左右4 个长距超声波的探测距离为30~500 cm,用来探测车位信息。设计每次一个短距超声波雷达和2 个长距超声波雷达同时发波,发波的短距雷达及临边短距雷达和最近一次发波的长距雷达同时收波,需要循环8 次即可遍历所有雷达。
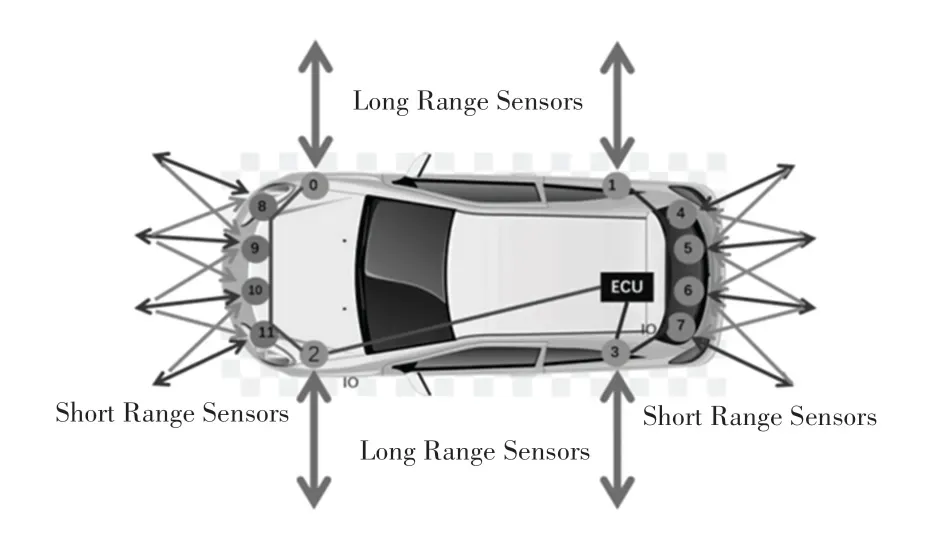
图15-1 超声波雷达收发波时序示意图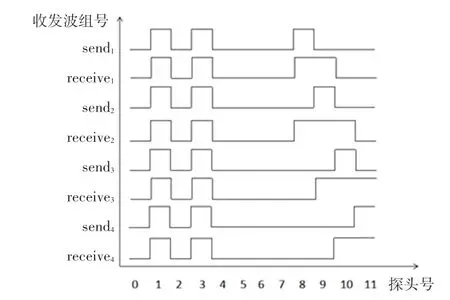 图15-2 超声波雷达收发波时序示意图
图15-2 超声波雷达收发波时序示意图图中表示出车头4 个短距雷达及车后侧2个长距雷达的收发波时序,其余6 个雷达收发波时序原理相同。
以上主要是一个轮流收发关系,实际在设计中,可以通过coding正交化,尽量增加同时收发。
5、Freespace 计算
基于目标定位与测距算法计算Free Space 区域用来实现超声波自动泊车。前后共8 个UPA 雷达、水平发射角为120°,设定最大探测距离为2.5 m,左、右共4 个APA 雷达、水平发射角为80°,设定最大探测距离为5 m。在泊车过程中,通过串口打印并保存多组探测数据。在每个探头水平发射角内,等角度取20 组探测数据,超过最大探测距离的位置记为最大探测距离。射线区域内即为自由泊车区域。
6、实际验证
选用标准PVC管(标准规格为75mm diameter, 1m height)对系统功能进行测试,为了验证实时矫正算法的有效性,分别针对矫正前与矫正后进行了2次对比测试,选择汽车前面4 个传感器进行测量。在标定布上随机摆放PVC 管,设定自发自收模式,利用串口在PC 机得到实时测量数据,实际距离用激光测距仪标定。
可见,未经矫正过的超声波雷达测距最大误差可达8 cm,难以实现泊车过程中准确的测量与定位。
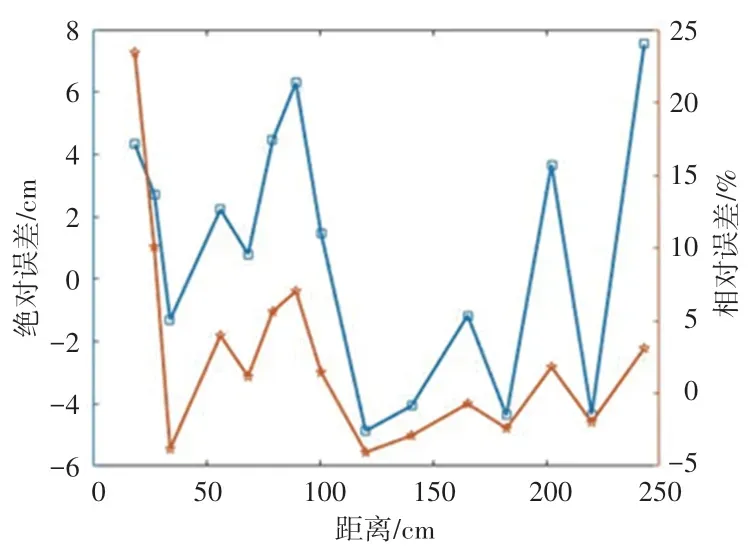 图16 未矫正时的误差
图16 未矫正时的误差集成了实时矫正算法后,采用与上面相同的测量方法进行实车测试,最大误差控制在1.5 cm以内,满足自动泊车算法中对测距与定位的精度要求。
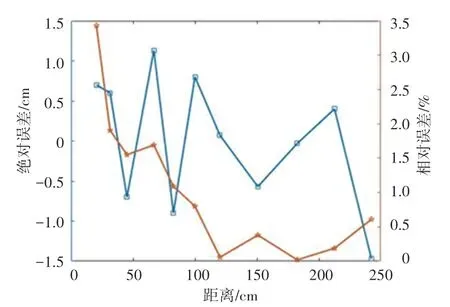 图17 矫正后的误差
图17 矫正后的误差
