(第420期)
汽车主机厂ADAS研发人员
自动驾驶的核心,是让车辆拥有“超越人类的感知能力”——无需司机操控,就能精准识别路况、规避风险、规划路径。而支撑这份“感知力”的核心硬件,正是各类雷达系统。它们如同车辆的“千里眼”“顺风耳”,分工协作、层层覆盖,从近距离泊车到远距离巡航,从晴朗白天到恶劣天气,构建起无死角的环境感知网络。
不同于单一雷达的独立工作,自动驾驶系统的雷达方案是一套“协同作战体系”。目前主流车载雷达主要分为三大类:
超声波雷达、毫米波雷达、激光雷达。
此外还有针对特定场景优化的4D成像毫米波雷达、纯雷达感知框架等升级方案。每一类雷达都有其独特的技术原理、性能优势和应用场景,共同构成了自动驾驶从L2到L4级别的感知基石。今天,我们就全面拆解自动驾驶系统中所有雷达的技术方案,读懂它们如何让车辆“看清”世界。
一、超声波雷达:近距离感知的“触觉卫士”(基础必备方案)
超声波雷达是自动驾驶系统中最基础、最普及的雷达类型,核心定位是“近距离盲区探测”,如同车辆的“触觉传感器”,负责守护车辆周边3米内的安全,是自动泊车、低速挪车的核心支撑,几乎所有搭载辅助驾驶功能的车辆都标配该系统。
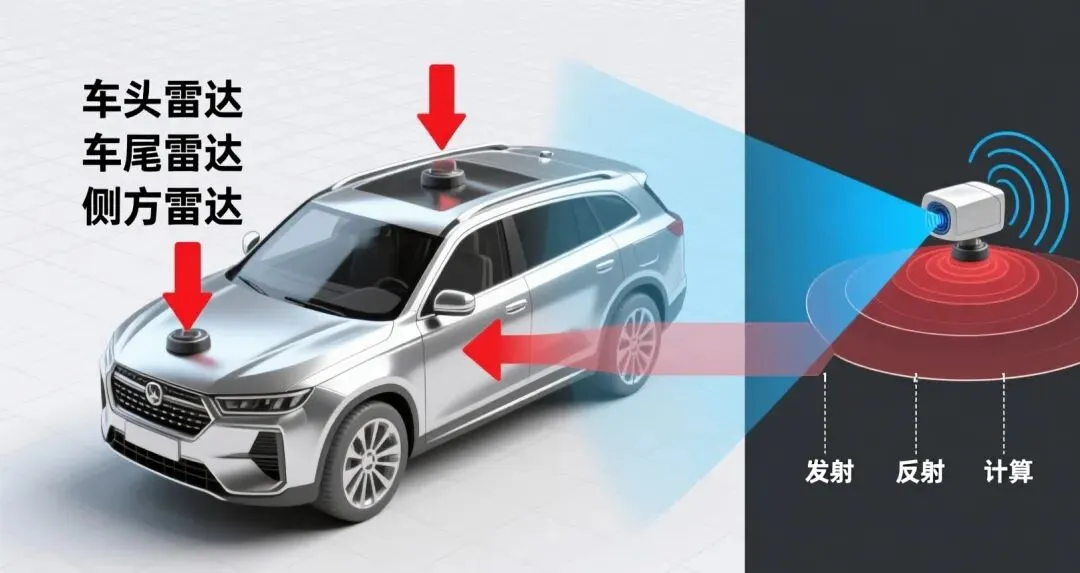
其技术方案核心基于声波反射原理:通过压电陶瓷换能器发射40-58kHz的高频超声波,当声波遇到障碍物(车辆、行人、路沿、井盖等)后会反射回接收端,系统根据“距离=声速×时间差/2”的核心公式,精准计算出障碍物与车辆的距离 。
从硬件构成来看,超声波雷达的方案设计简洁且成本可控,单套传感器由发射/接收换能器、信号处理电路、控制单元三部分组成。车载场景中,通常采用“4-12颗”的布局方案:车头、车尾保险杠各安装4颗,部分高端车型会在车身侧面增加4颗,实现360°近距离覆盖。
技术参数上,超声波雷达的探测范围集中在0.3-5米,角分辨率约15-30度,测距精度可达厘米级,能稳定识别非金属物体(如塑料路锥、绿植),这是其核心优势之一 。同时,它的成本极低,单颗车规级超声波雷达的价格仅几十元,适合大规模量产,且受电磁干扰影响小,在地下车库、隧道等封闭场景中表现稳定。
但该方案也有明显局限:探测距离短、响应速度慢,无法适应高速场景(车速超过30km/h时,信号反馈滞后,失去实用价值);同时,其探测精度易受环境温度影响(声速随温度变化),在风速大于5m/s的场景下可能出现误报,因此仅用于低速近距离场景,无法单独支撑高阶自动驾驶 。
二、毫米波雷达:全天候巡航的“核心主力”(主流核心方案)
如果说超声波雷达负责“近距离守护”,那么毫米波雷达就是自动驾驶的“中远距离主力”,核心定位是“全天候动态目标监测”,支撑ACC自适应巡航、AEB自动紧急制动、BSD盲区监测、LCA变道辅助等核心功能,是L2及以上级别自动驾驶的“必备配置”,也是目前车载雷达中应用最广泛的方案。
其技术方案核心基于电磁波反射与多普勒效应,工作在毫米波频段(30-300GHz),车载主流频段集中在24GHz和77GHz(日本等少数国家采用60GHz频段),其中77GHz是当前前向雷达的绝对主流,对应波长约4mm,能检测到小至零点几毫米的目标位移,精准度远超24GHz频段。
与超声波雷达不同,毫米波雷达采用调频连续波(FMCW)技术,通过发射频率随时间线性变化的连续电磁波,利用回波与发射波的频率差(中频信号),同时完成测距、测速、测角三大核心任务——这也是其能支撑高速巡航的关键。
从硬件方案来看,毫米波雷达的核心部件是MMIC毫米波集成电路(技术壁垒最高的部分),它集成了信号发射、接收、放大、混频等所有高频模块,直接决定雷达的探测距离、精度和分辨率;再搭配雷达整流罩(透波高分子材料,抵御灰尘水汽)、PCB信号处理板、压铸散热底板和高速连接器,构成完整的感知单元。
车载布局方案分为“前向+侧向”结合:前向毫米波雷达(通常1颗)安装在车头格栅处,采用77GHz频段,探测距离可达150-200米,角分辨率3-5度,能同时跟踪多个前方目标(车辆、行人、非机动车),精准测算其相对速度和距离,为ACC、AEB功能提供数据支撑;侧向毫米波雷达(通常4颗,左右车身各2颗)采用24GHz频段,探测距离30-100米,主要用于盲区监测和变道辅助,覆盖车辆侧后方的动态盲区 。
技术优势方面,毫米波雷达最大的亮点是全天候适配——能穿透雨、雪、雾、沙尘等恶劣天气,不受光照条件影响,白天黑夜、逆光强光下都能稳定工作,这是激光雷达和摄像头无法替代的。同时,它体积小巧、功耗低、成本适中(单颗77GHz雷达价格约500-1500元),适合量产,且能精准识别动态目标,测速精度高。
局限在于,毫米波雷达的方位角分辨率相对较低,对静态物体(如静止车辆、路障)的识别能力有限,容易出现“漏检”;同时,其无法识别目标的细节轮廓,只能判断“有障碍物”,无法区分“行人”和“护栏”,因此需要与其他雷达、摄像头协同工作 。
近年来,毫米波雷达方案迎来升级——4D成像毫米波雷达,在传统“测距、测速、测角”三维基础上,新增“高度”探测维度(俯仰角),能识别低矮障碍物(如井盖、路沿),区分高架桥阴影与真实车辆,误刹率降低90%,成为高阶辅助驾驶的升级选项,目前已广泛应用于L2+级别车型。
三、激光雷达(LiDAR):高精度感知的“终极利器”(高阶必备方案)
激光雷达是实现L3及以上级别自动驾驶(高阶自动驾驶、无人驾驶)的核心雷达方案,核心定位是“高精度三维环境建模”,如同车辆的“高清三维扫描仪”,能精准捕捉周边环境的细节轮廓,为车辆决策提供最精准的感知数据,是目前车载雷达中技术含量最高、成本最高的类型。
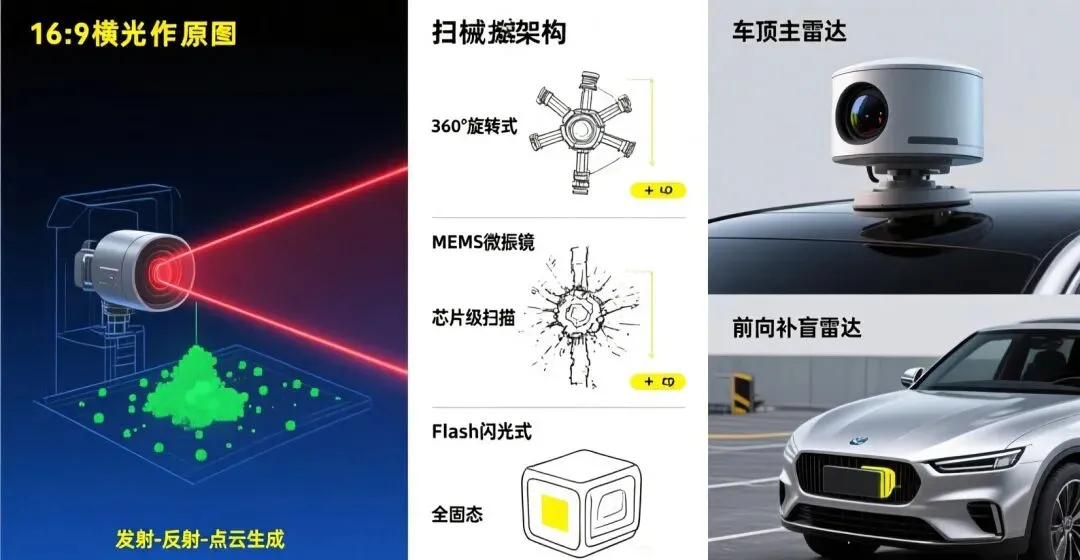
其技术方案核心基于飞行时间法(ToF) :通过发射纳秒级的激光脉冲(红外波段),利用激光从发射到反射回接收端的时间差,结合光速计算出目标距离;再通过高速旋转或MEMS振镜扫描,将无数激光脉冲反射点拼接成周边环境的三维点云模型,精准识别目标的形状、大小、位置和姿态,甚至能区分行人的肢体动作、车辆的车型细节。
激光雷达的技术方案有多个关键维度,也是区分不同产品的核心:
1. 波长方案:905nm vs 1550nm
这是激光雷达的核心技术分水岭,直接决定探测距离和安全性:
- 905nm波长:当前性价比主流方案,采用硅(Si)基探测器,工艺成熟、成本较低,但受限于人眼安全(光线可穿透玻璃体直达视网膜),发射功率被严格限制,探测距离难以突破200米,适合L2+级别车型;
- 1550nm波长:高阶方案,采用铟镓砷(InGaAs)探测器,光线被眼球水分吸收,无伤害风险,发射功率可提升40倍以上,探测距离轻松达到500米+,且穿透雨雾能力更强,但成本较高,主要用于L3及以上级别车型(如Waymo、蔚小理高阶车型)。
2. 扫描架构方案(通往固态之路)
激光雷达的扫描架构决定其体积、寿命和可靠性,目前主流有三种方案:
- 机械旋转式:传统方案,通过电机+滑环驱动激光发射模块360°旋转,能实现全场景覆盖,但体积大、寿命短、成本高,难以通过车规测试,目前已逐渐被淘汰,代表厂商有禾赛(Pandar系列)、Velodyne;
- MEMS微振镜式:当前主流方案,通过微振镜的微小摆动实现激光扫描,体积小、分辨率高、寿命长,适合车规量产,代表厂商有速腾聚创(M系列)、Innoviz,也是目前多数L2+、L3车型的选择;
- 纯固态式(Flash):未来趋势,无需机械部件,通过面阵发射激光,瞬间完成全场景扫描,体积最小、可靠性最高,但技术难度大,目前仍处于量产攻坚阶段,核心依赖SPAD/SiPM单光子探测器技术(能检测单个光子,灵敏度极高)。
3. 车载布局方案
激光雷达的布局需兼顾“全场景覆盖”和“隐蔽性”,目前主流有三种:
- 车顶布局:最常见方案(如特斯拉Cybertruck、理想L9),1颗激光雷达安装在车顶,实现360°无死角扫描,探测范围最广,但影响车辆外观,风阻较大;
- 前向布局:集成在车头格栅或大灯处(如华为ADS系统),1-2颗激光雷达,重点覆盖前方路况,兼顾隐蔽性和实用性,是目前主流的量产布局;
- 多传感器融合布局:高阶无人驾驶方案(如Waymo),车身四周安装4-6颗激光雷达,结合毫米波雷达、摄像头,实现全场景无死角、冗余感知,确保极端场景下的安全性。
技术优势方面,激光雷达的探测精度极高(定位精度优于10厘米,角分辨率可达0.1度),点云密度可达100-300点/度²,能精准识别静态和动态目标,甚至能应对“鬼探头”“横穿马路的行人”等复杂场景;同时,其三维建模能力能让车辆清晰识别车道线、护栏、井盖等细节,为路径规划提供精准支撑。
局限在于成本较高,当前车规级激光雷达单价约1000-3000美元(国内量产型号已降至万元以内),难以普及到15万以下车型;同时,在暴雨、浓雾等极端天气下,激光穿透力下降,探测距离会缩水30%左右,需要与毫米波雷达协同弥补短板。
四、纯雷达感知方案:攻克痛点的进阶探索(未来趋势方案)
无论是单一雷达还是多雷达融合,传统方案都存在一定局限——激光雷达成本高、毫米波雷达易受噪声干扰、单帧雷达感知语义不足。近年来,行业开始探索“纯雷达感知方案”,无需依赖摄像头,仅通过雷达就能实现精准目标检测,其中最具代表性的就是RaFD框架方案。
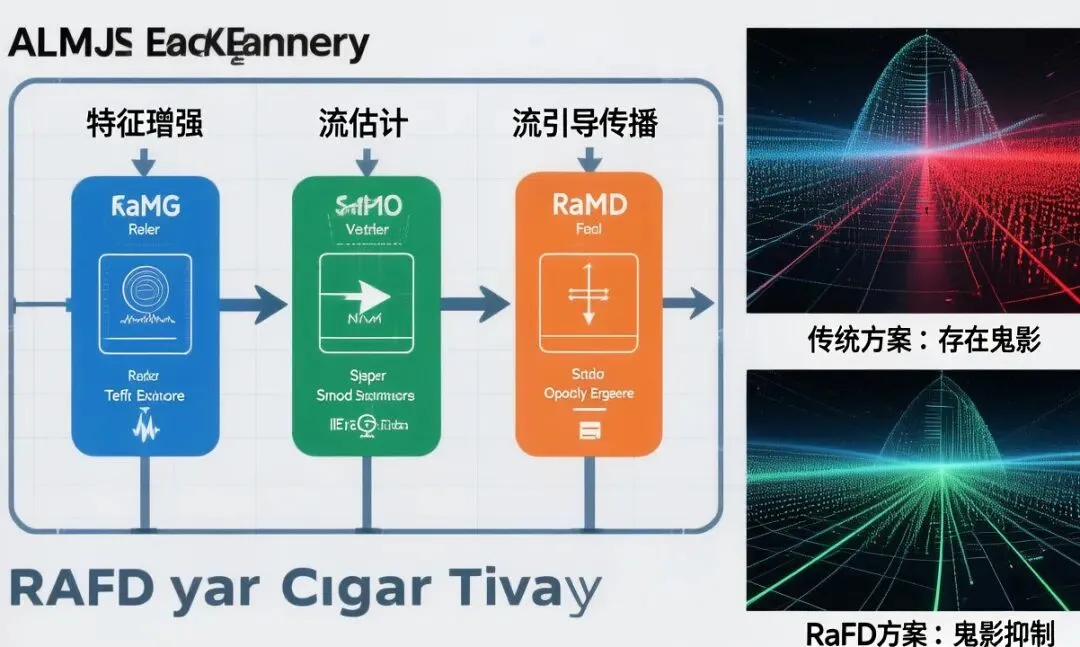
RaFD方案的核心目标,是解决原始雷达图像的噪声和“鬼影”伪影问题(雷达信号反射产生的虚假目标),通过建模几何运动线索,提升纯雷达感知的精度和可靠性。其核心技术逻辑的是:估计帧间鸟瞰图(BEV)流,利用几何线索引导特征传播,让雷达能精准区分真实目标和虚假信号。
具体来说,RaFD方案构建在CenterFormer基础上,分为三大核心模块:
1. 特征增强模块:采用类似SwinTransformer的移位窗口局部注意力机制,聚合空间上下文信息,解决雷达图像噪声、模糊的问题,增强特征表示能力;
2. 流估计模块:引入有监督的BEV场景流估计作为辅助任务,通过卷积层编码特征、全局交叉注意力捕捉帧间时间依赖性,生成帧间运动矢量场,无需额外标注,可从检测标注中自动推导出伪真实流;
3. 流引导传播模块:利用估计的流向量,引导前一帧的特征传播到当前帧,通过流引导可变形注意力聚合时间对齐的特征,实现更稳健的目标检测,且能无缝扩展到多帧输入,增强动态场景的感知能力。
该方案在RADIATE数据集上实现了最先进的性能,尤其在良好天气下,目标检测精度远超传统纯雷达方案,证明了结合几何信息解释雷达信号的有效性,为纯雷达感知的落地提供了可行路径——未来有望降低高阶自动驾驶的成本(无需依赖高清摄像头),同时提升恶劣天气下的感知可靠性。
五、雷达协同方案:自动驾驶感知的“终极答案”
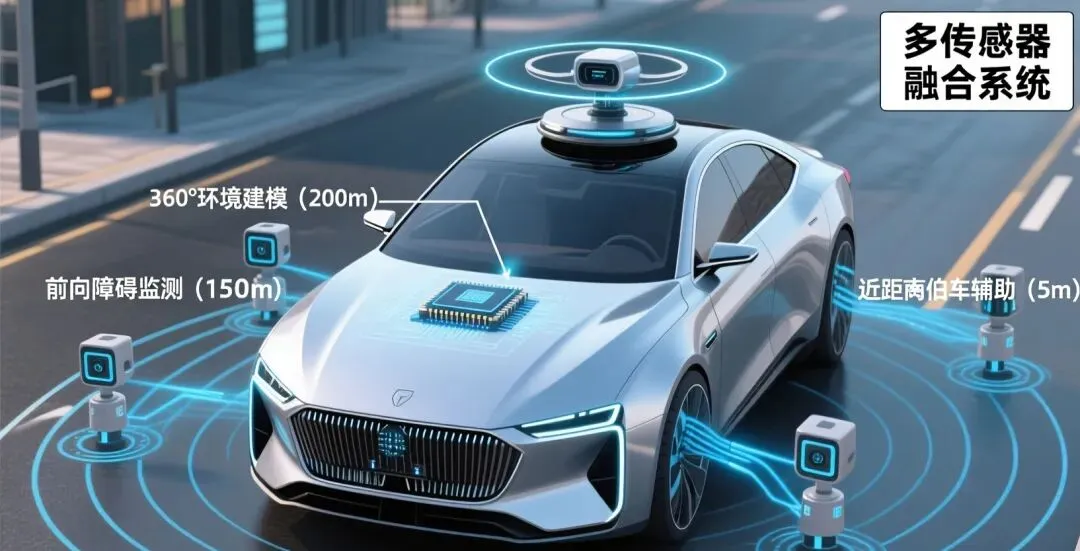
无论是超声波雷达、毫米波雷达,还是激光雷达、纯雷达框架,单一雷达都无法满足所有场景的需求——超声波雷达管近距离,毫米波雷达管全天候中远距离,激光雷达管高精度,纯雷达框架补全痛点,它们的协同工作,才是自动驾驶感知的“终极方案”。
目前主流的雷达协同方案,核心是“多雷达+传感器融合”,以L2+级别车型为例,典型配置如下:
1. 超声波雷达(4-12颗):负责自动泊车、低速挪车的近距离盲区探测,弥补毫米波雷达近距离盲区;
2. 毫米波雷达(5颗):1颗前向77GHz雷达(负责ACC、AEB)+4颗侧向24GHz雷达(负责BSD、LCA),实现全天候中远距离动态目标监测;
3. 激光雷达(1-2颗):负责高精度三维环境建模,弥补毫米波雷达细节识别不足的短板,提升复杂场景的感知精度;
4. 纯雷达感知框架(可选):优化雷达信号处理,降低对摄像头的依赖,提升极端场景下的可靠性。
协同方案的核心逻辑,是通过车载ECU(电子控制单元),将各类雷达的感知数据进行融合处理,剔除冗余信息、弥补单一雷达的局限——比如,暴雨天气下,激光雷达探测距离下降,由毫米波雷达主导中远距离监测;低速泊车时,超声波雷达主导,毫米波雷达辅助;高速巡航时,激光雷达+毫米波雷达协同,精准识别前方目标和路况细节。
典型案例如华为ADS系统,融合激光雷达与4D毫米波雷达,预判“鬼探头”的成功率提升80%;特斯拉虽然主打“纯视觉”,但也在部分车型中加入毫米波雷达,弥补摄像头在恶劣天气下的不足,本质上也是“单一雷达+其他传感器”的协同逻辑。
结语:雷达技术,定义自动驾驶的安全边界
从超声波雷达的“近距离守护”,到毫米波雷达的“全天候巡航”,再到激光雷达的“高精度建模”,以及纯雷达框架的“痛点突破”,车载雷达的技术方案迭代,本质上是自动驾驶感知能力的升级——让车辆从“能看清”,到“看得准”,再到“看得远、看得稳”。
随着技术的不断成熟,激光雷达的成本正在快速下降(预计未来3-5年,车规级产品单价将降至千元以内),4D毫米波雷达逐渐普及,纯雷达感知方案落地加速,雷达协同的精度和可靠性也将持续提升。未来,当超声波雷达、毫米波雷达、激光雷达与纯雷达框架深度融合,再结合AI算法的优化,自动驾驶将真正实现“无死角感知、零风险决策”,让每一次出行都更安全、更便捷。
对于普通消费者而言,了解车载雷达的技术方案,不仅能看懂车辆辅助驾驶功能的核心优势,也能在购车时,根据自身需求选择更适合的配置——毕竟,自动驾驶的安全,从来都离不开这些“隐形的感知卫士”。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
