2026年2月,俄亥俄州共和党议员鲍勃·拉塔向众议院提交H.R.7390号议案时,美国汽车安全立法正站在一个历史性的十字路口。这份《Safely Ensuring Lives Future Deployment and Research In Vehicle Evolution Act of 2026》的缩写"SELF DRIVE"看似直白,实则暗含深意——它标志着美国立法者终于承认,继续用1966年《国家交通与机动车安全法》的框架来规制自动驾驶车辆,就像试图用蒸汽时代的铁路法规管理航空运输一样不合时宜。
这不是危言耸听。现行《美国法典》第49编第301章构建于一个不言自明的前提:车辆的安全性能最终取决于人类驾驶员的感知、判断与操作。所有安全标准——从方向盘的反馈力度到仪表盘的警示方式——都指向同一个目标:让驾驶员在关键时刻做出正确反应。但当SAE L3级系统engaged时,动态驾驶任务(DDT)的实质控制权已从人类转移至算法;在L4/L5级场景下,车内甚至可能不存在"fallback-ready user"。继续沿用基于人类驾驶员的安全标准,不仅逻辑上无法自洽,实践中更会造成荒诞后果——要求为无方向盘车辆配备符合人体工程学的方向盘,在旧框架下却难以避免。
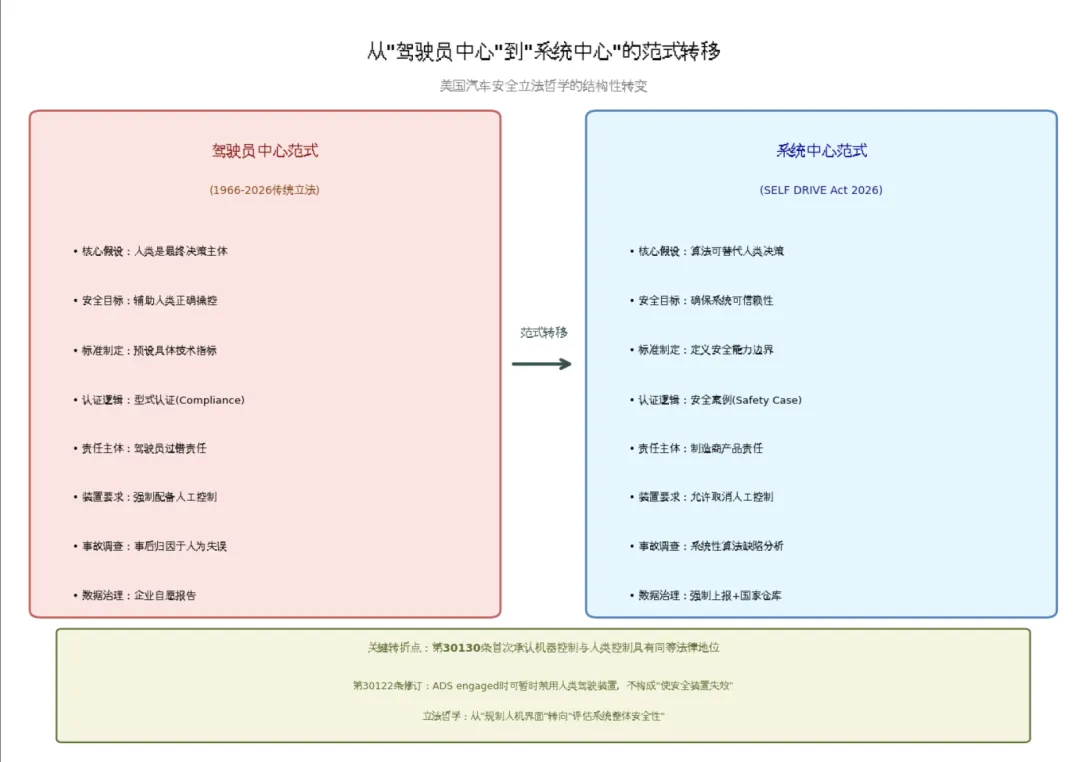
《SELF DRIVE Act of 2026》的里程碑意义,正在于它首次系统性地完成了从"驾驶员中心"到"系统中心"的范式转移。
两种立法哲学的结构性对比
理解这份法案的突破性,需要将其置于美国汽车安全法的历史脉络中审视。自1966年NHTSA成立以来,联邦汽车安全立法遵循的是"驾驶员中心范式"(Driver-Centric Paradigm)。这一范式的核心假设是:人类是交通系统中最终的、不可还原的决策主体。机器可以辅助、增强、甚至警告人类,但不能取代人类做出关乎生死的判断。
基于这一假设,传统立法发展出一套完整的规制工具:预设具体技术指标的型式认证制度、以驾驶员过错为基础的责任体系、强制配备人工控制装置的设计要求、事后归因于人为失误的事故调查程序。这套工具在机械时代运转良好,因为车辆的物理性能边界清晰可测,人类驾驶员的行为模式相对稳定。
但自动驾驶技术的出现,使这一范式遭遇了根本性挑战。当决策核心是一个拥有数十亿参数的神经网络时,"驾驶员"这一概念本身变得模糊——在L3级场景下,人类是监督者而非操作者;在L4/L5级场景下,人类可能完全退出控制回路。继续将人类作为规制中心,不仅无法保障安全,反而会制造新的风险:要求人类监督一个他们无法真正理解的系统,这种"虚假控制感"可能比明确的机器控制更危险。
《SELF DRIVE Act of 2026》创造的"系统中心范式"(System-Centric Paradigm),通过以下结构性差异回应了这一挑战:
| | 系统中心范式(SELF DRIVE Act 2026) |
|---|
| 核心假设 | | |
| 安全目标 | | 确保系统整体可信赖性(Trustworthiness) |
| 标准制定逻辑 | | 定义安全能力边界(Competencies),技术中立 |
| 认证模式 | 型式认证(Type Approval):证明符合每一项预设标准 | 安全案例(Safety Case):论证"不会带来不合理风险" |
| 责任主体 | | |
| 人工控制装置 | | 允许豁免(第30122条修订),L4/L5无人物流车可完全取消 |
| 事故调查 | | 系统性分析,识别算法缺陷与边缘案例(Edge Cases) |
| 数据治理 | | |
| 网络安全 | | |
| 联邦-州关系 | | 联邦优先权(第30123条修订),禁止州级销售禁令 |
这种范式转移的深层含义,远超其具体条款的字面表述。它意味着法律首次承认:机器控制与人类控制在安全逻辑上具有同等地位——甚至更高地位,因为法案允许在特定条件下完全取消人类接管装置。这种承认需要巨大的政治勇气,毕竟,当事故发生时,"算法失误"比"人为失误"更难向公众解释。
对汽车生产制造的影响
| | | | |
|---|
| 车辆架构设计 | 必须基于人类驾驶设计,保留方向盘/踏板/后视镜等装置 | 允许"原生自动驾驶"架构,L4/L5车辆可完全取消人工控制装置 | 第30122条修订;第30130(c)(2)(B)条 | 车辆平台从"人机双模"转向"算法原生",底盘、电子电气架构需重新设计 |
| 传感器配置 | | | 第30130(b)(3)(A)(iii)条:传感器能力完整描述 | 激光雷达、4D毫米波雷达、高清摄像头需求激增,传统雷达/摄像头厂商分化 |
| 计算单元 | | | 第30130(b)(3)(A)(i)条:计算系统描述 | 英伟达、高通、Mobileye等芯片商地位上升,传统Tier1电子架构被颠覆 |
| 人机界面(HMI) | | | 第30130(c)(1)条:乘客紧急停车与退出系统 | 座椅、显示屏、内饰供应商转型,传统HMI供应商市场萎缩 |
| 供应链安全 | | 商务部审查"特定国家"ICT供应链,隐含国产化压力 | | 中国激光雷达、电池、电控系统面临替代压力,墨西哥、东南亚供应链受益 |
| 网络安全内置 | | | 第30130(b)(3)(H)条:网络安全计划要求 | 汽车网络安全成为独立赛道,防火墙、加密、OTA安全服务商崛起 |
| 生产资质 | | | 第30130(b)(1)(A)条:安全案例强制要求 | 代工模式受冲击,OEM必须掌握核心算法与安全工程能力 |
| 测试验证 | | | | |
关键变革解析:
第30130(c)(2)(B)条对ADS-dedicated货运车辆的豁免具有颠覆性意义。该条款明确规定:"专为运输货物而设计、不搭载乘员的ADS-dedicated车辆,不受任何要求配备人工控制装置的安全标准约束。"这意味着无人物流车可以彻底取消方向盘、制动踏板、加速踏板、后视镜等"人类驾驶遗产",实现架构层面的极简设计。
这种豁免释放了三大制造红利:成本下降(取消冗余装置降低BOM成本15-20%)、空间优化(驾驶舱空间释放用于货舱或电池)、重量减轻(转向/制动机械结构取消降低车重)。对于每年采购数十万辆商用车的物流巨头(亚马逊、UPS、FedEx),这种架构优势将直接转化为运营效率。
但硬币的另一面是制造门槛的急剧抬升。第30130(b)(1)(A)条将安全案例作为制造销售的前置条件,这意味着OEM不能仅仅作为"硬件集成商",必须建立完整的安全工程体系,包括危害分析、验证方法、接受准则定义等。这种要求对Rivian、Lucid等新势力是沉重负担,可能加速行业整合。
对汽车用途与商业模式的影响
| | | | |
|---|
| Robotaxi | | | | Waymo、Cruise等可提前2-3年实现收入,商业模式验证加速 |
| 无人物流 | | | | 长途货运、最后一公里配送成本结构重塑,司机成本占比从40%降至5% |
| 私家车 | | | 第30130(a)(1)(C)条:SAE L3-L5定义 | |
| 车内空间 | | | | 座椅、显示屏、音响系统升级,车内广告/娱乐服务新赛道 |
| 运营时间 | | | | |
| 地理范围 | | | | 跨州物流、全国Robotaxi网络成为可能,规模效应释放 |
商业模式革命:
第30112条修订引入的"有限商业化运营"(limited commercial operations)条款,打破了传统"测试-认证-上市"的线性流程。制造商可在测试阶段即开展收费载客和货运,前提是获得交通部长授权,并遵守基于使用场景的限制(车辆数量、里程、收入、部署时长)。
这种"测试即运营"(Testing-as-Operations)模式具有三重战略价值:数据获取(真实商业场景数据质量远高于测试场景)、收入前置(缓解研发期的现金流压力)、用户教育(早期采纳者成为技术传播者)。对于资本密集的自动驾驶行业,这意味着融资周期的缩短和估值逻辑的重构。
更深远的影响在于第30130(c)(2)(B)条对无人物流车的彻底豁免。该条款不仅取消了人工控制装置要求,还隐含了运营时间的解放——不受人类驾驶员工时法规限制。对于长途货运,这意味着洛杉矶到纽约的48小时直达成为可能;对于城市配送,夜间低流量时段的充分利用将重塑物流成本结构。
安全案例制度:从"合规"到"论证"的认知革命
第30130条建立的安全案例制度,是范式转移在操作层面的集中体现。这一制度彻底改变了车辆市场准入的认证逻辑,其颠覆性可与20世纪70年代FDA引入药品临床试验制度相提并论。
传统NHTSA安全标准遵循"型式认证"模式:监管机构制定详细的技术规范(如FMVSS 208规定安全带的具体性能参数),制造商通过检测证明产品符合每一项预设标准,即可获得销售许可。这种模式的隐含假设是:监管机构能够预见所有安全风险,并将其转化为可量化的技术指标。在机械时代,这一假设基本成立——车辆的物理性能边界清晰,故障模式有限且可预测。
但自动驾驶系统的复杂性使这一假设彻底失效。一个深度学习模型的决策逻辑,不仅取决于代码本身,还取决于训练数据、权重参数、运行时的环境感知融合。即使开发者也无法完全预测系统在每一种极端场景下的行为。要求NHTSA预设"安全"的技术标准,在逻辑上已成为不可能任务——监管机构既缺乏技术能力,也缺乏信息优势。
安全案例制度放弃了对技术细节的审查,转向对安全管理体系的评估。第30130(b)(3)条要求制造商提交"claims, supported by arguments and evidence",证明其ADS的设计、构造和性能"不会带来不合理的事故、死亡或伤害风险"。关键差异在于:标准不再是监管机构预设的,而是由制造商基于自身技术路径定义,经监管审查确认。
这种"论证式监管"(Argument-Based Regulation)具有三重效应:
第一,认知升级:从"通过测试"到"说服监管者"。传统模式下,制造商的目标是证明产品符合 checklist;新模式下,目标是建立一套可审计的安全叙事。这要求企业建立全新的安全工程体系,不仅要知道系统如何工作,还要能够论证为何这种工作方式是安全的。第30130(b)(3)条列举的七项必备内容——硬件软件描述、运行设计域(ODD)、工程方法论、安全性能分析、ODD边界检测、应急响应机制、网络安全计划——构成了这种叙事的结构性框架。
第二,技术中立:避免过早锁定技术路线。安全案例不规定必须使用激光雷达还是纯视觉方案,不强制特定架构的冗余设计,而是要求制造商证明其选择能够满足安全目标。这种开放性为创新保留了空间——但也对监管者的技术理解能力提出了极高要求。第30130(b)(4)条列举的ADS能力清单(如检测弱势道路使用者、识别ODD边界、响应紧急车辆等),定义的是"做什么"而非"怎么做",体现了原则导向(Principles-Based)而非规则导向(Rules-Based)的监管哲学。
第三,责任前移:从"合规抗辩"到"虚假陈述风险"。传统模式下,符合联邦标准构成"安全底线",制造商可据此抗辩州级诉讼;安全案例模式下,制造商对安全论证的真实性承担更大责任。一旦实际表现与论证不符,面临的将是"虚假陈述"而非mere"不合规"的指控。这种责任配置,使安全案例不仅是监管文件,更是法律责任的锚定点。
人工控制装置的豁免:从"人机界面"到"系统架构"的设计自由
第30122条的修订,是范式转移在物理层面的最直观体现。该条明确规定:当ADS engaged且能够完整执行DDT时,制造商可暂时禁用或改变专为人类驾驶设计的装置功能,且不构成"使安全装置失效"的违法行为。这种豁免,直接挑战了百年汽车设计传统。
在传统立法框架下,方向盘、制动踏板、加速踏板、后视镜等装置被视为"安全装置"的组成部分,其存在本身具有法律强制性。这种要求的逻辑基础是:无论车辆具备何种辅助功能,人类驾驶员必须保留最终控制权。但在L4/L5级场景下,这种"保留控制"不仅无必要,反而构成设计负担——为永远不会被使用的功能预留空间、重量和成本。
第30130(c)条走得更远:专为运输货物而设计、不搭载乘员的ADS-dedicated车辆,不受任何要求配备人工控制装置的安全标准约束。这意味着,无人物流车可以彻底取消方向盘、踏板、后视镜等"人类驾驶遗产",实现架构层面的极简设计。这种豁免 recognition 了物流场景与载客场景的本质差异——没有乘客需要保护,也就不需要为乘客提供紧急接管机制。
更深层的意义在于,这种豁免释放了"原生自动驾驶"(Native Autonomous)设计的空间。传统上,自动驾驶系统被迫适配为人类驾驶设计的车辆平台,传感器布局、计算单元位置、电源冗余都受到既有架构的制约。取消人工控制装置的强制要求,使制造商能够从头设计专为算法优化的车辆——更高效的传感器融合、更合理的重心分布、更轻量化的结构。这种设计自由,可能带来安全性和经济性的双重提升。
联邦优先权:统一市场与制度竞争的博弈
第30123条的修订,将范式转移从技术标准层面扩展至监管体制层面。该条确立的联邦优先权,直接回应了美国自动驾驶产业面临的最紧迫制度障碍:各州监管标准的碎片化。
在联邦立法缺位的情况下,美国50个州对自动驾驶的规制呈现"百家争鸣"态势。加州要求制造商获得DMV颁发的测试许可,并提交详细的碰撞报告;亚利桑那州采取"轻监管"策略,吸引企业落户;纽约州则要求测试车辆必须配备人类安全员,且只能在特定区域运行。这种差异导致企业的合规成本随运营地域呈指数级增长——同一套系统,在凤凰城合法,在旧金山可能违法。
第30123(b)(3)(A)条明确规定:任何州或政治subdivision不得制定法律,禁止符合联邦安全案例要求的ADS车辆销售,或要求制造商向州政府提交事故报告。这种优先权不是对州权的全面剥夺——交通法规、车辆登记、保险、环境规制等仍保留给州政府——而是针对"安全标准"这一特定领域的排他性联邦管辖。
这一设计的战略意图显而易见:为美国自动驾驶产业创造一个统一的国内市场,使其能够与中国的集中式监管体系竞争规模优势。当中国的百度、小马智行可以在一个城市获批后迅速扩展至全国时,美国的Waymo却曾在每一个新城市面临重新谈判的困境。联邦优先权试图消除这种制度性劣势。
然而,优先权条款的例外规定(第30123(b)(3)(C)条)也留下了博弈空间。州政府仍可通过"交通法规""拥堵管理""消费者保护"等名义施加实质性影响。这种"明禁暗允"的立法技术,既回应了联邦主义的传统约束,也为未来的法律冲突埋下了伏笔。加州等强监管州可能通过提高保险要求、限制运营区域、加强环境审查等方式,变相实现其监管目标。
对汽车金融与保险的影响
| | | | |
|---|
| 责任主体 | | | 第30123(b)(3)(B)(ii)条:遵守联邦标准不免除普通法责任 | |
| 保险模式 | | | 第30123(b)(3)(C)(v)条:保险监管保留给州 | |
| 数据定价 | | | | |
| 承保主体 | | 制造商自保(Captive Insurance)趋势 | | |
| 融资模式 | | | | |
| 风险资本 | | | 第30130(b)(2)(A)条:2027年截止期 | |
保险真空的制度性困境:
法案在保险领域的回避态度,暴露了一个日益扩大的制度真空。第30123(b)(3)(C)(v)条明确将保险监管保留给各州,同时第30123(b)(3)(B)(ii)条声明遵守联邦安全标准不免除普通法责任。这种"联邦管安全,州管保险,法院管责任"的三分格局,在自动驾驶场景下产生了严重的协调失灵。
当一辆L4级Robotaxi发生事故时,责任链条涉及:车辆制造商(硬件缺陷?)、自动驾驶系统开发商(算法缺陷?)、传感器供应商(感知失败?)、地图数据提供商(定位错误?)、远程监控运营商(干预延迟?)、乘客(是否按要求系安全带?)。传统车险基于"单一驾驶员过错"的定价逻辑彻底失效,但新的精算模型又缺乏数据支撑——第30131条的国家仓库数据受商业秘密保护,保险公司难以获取。
这种真空可能导向三种演化路径:制造商自保(特斯拉已设立内部保险公司)、州级强制保险池(类似工伤保险的社会化分担)、参数保险创新(基于实时系统状态数据的动态定价)。但无论哪种路径,都意味着保险行业的结构性重塑。
数据治理与网络安全:从"事后应对"到"内置安全"
第30131条建立的国家自动驾驶车辆安全数据仓库,代表了联邦政府对这一新兴领域数据主权的宣示。与传统汽车事故的事后调查不同,ADS-equipped车辆的事故数据具有系统性价值——它们是改进算法、识别边缘案例、验证安全案例的关键输入。
法案要求制造商在"covered crash"(涵盖性事故,包括死亡、重伤、气囊展开、弱势道路使用者撞击、车辆拖曳等)发生后30天内提交详细报告,并每季度上报ADS启用状态下的行驶里程。这种强制性数据上报,突破了传统汽车安全立法依赖企业自愿报告或NHTSA事后调查的被动模式。
然而,数据仓库的设计体现了美国特有的制度张力。所有提交信息受商业秘密保护(confidential business information),豁免《信息自由法》的公开要求;州监管机构可以访问,但必须遵守同等保密义务;公众只能通过"最小化重复"后的汇总数据了解概况。这种"收集-保密-有限共享"的架构,试图在监管需要与商业利益之间走钢丝——既要获取足够数据以评估安全性,又要保护企业的核心竞争机密。
网络安全条款同样体现了"内置安全"(Security by Design)的理念。第30130(b)(3)(H)条将网络安全计划列为安全案例的必备要素,要求包括:书面网络安全政策、风险评估流程、预防和纠正措施、事件响应计划、入侵检测系统等。这种前置性要求——网络安全不再是上市后的合规附加项,而是市场准入的前提条件——与航空和核能等高风险行业的"全生命周期安全管理"模式接轨。
里程碑的局限与未竟之业
《SELF DRIVE Act of 2026》并非终点,而是一个充满张力的起点。即便法案完成立法,其真正的考验在于实施——安全案例的审查标准如何把握,联邦优先权与州级监管的边界如何界定,数据仓库的保密与透明如何平衡,这些细节将决定立法意图能否转化为产业现实。
法案的结构性局限同样明显。在保险与责任认定领域,文本明确将保险监管保留给各州,同时声明遵守联邦安全标准不免除普通法下的责任。这种回避态度,暴露出一个日益扩大的制度真空:当L4级自动驾驶出租车发生事故时,责任链条涉及车辆制造商、系统开发商、传感器供应商、地图数据提供商、远程监控运营商等多个主体,传统车险基于"驾驶员过错"的定价和理赔逻辑已彻底失效。
更深层的问题在于,安全案例制度对监管能力提出了极高要求。NHTSA是否具备足够的技术人才来审查复杂的安全案例?在制造商与监管者的信息不对称下,如何避免"监管俘获"——即企业利用其信息优势塑造有利于自身的审查标准?第30130(b)(5)条要求交通部在四年后提交新标准的建议报告,这种"延迟决策"既为学习留出了时间,也可能导致安全案例制度的空心化。
写在最后
当历史学家回望2026年,他们或许会将《SELF DRIVE Act of 2026》视为一个转折点——不是因为它解决了所有问题,而是因为它重新定义了问题的性质。从"如何让驾驶员更安全"到"如何让系统可信赖",从"规制人机界面"到"评估整体安全性",这种范式的转移其影响将远超自动驾驶本身。
这份法案的真正价值,在于它为技术时代的政府角色提供了一种实验性回答:当监管机构承认"看不懂"代码时,如何通过制度设计仍然履行其保护公众安全的职责?安全案例制度、联邦优先权、数据仓库——这些工具共同构成了一种新的监管语法,其核心不是控制技术细节,而是建立可信的问责链条。
自动驾驶的未来,不属于最激进的技术乐观主义者,也不属于最保守的安全怀疑论者,而属于那些能够在范式转移中保持制度弹性的监管设计者。在这个意义上,《SELF DRIVE Act of 2026》不仅是一部交通法规,更是一次关于技术治理的深刻实验——其实验结果,将为所有正在经历"智能化"改造的技术领域提供参照。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
