换个城市就不会开车?自动驾驶的“水土不服”有救了!
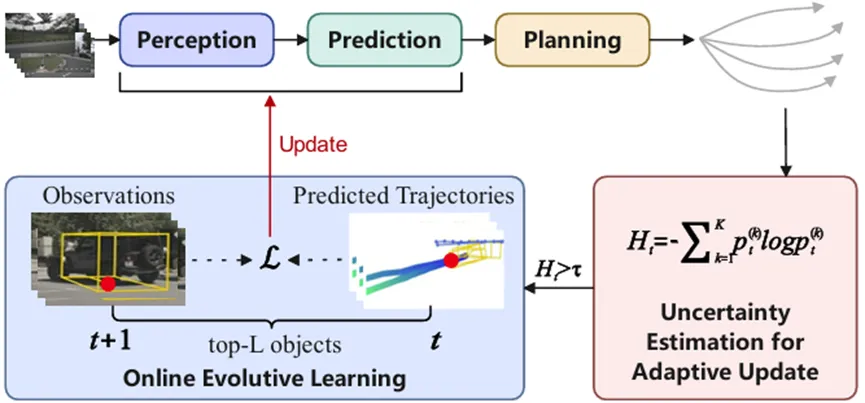
再过几年,自动驾驶可能真要变成咱们生活里的 “ 省心帮手 ” ,再也不用纠结 “ 换个地方就不会开 ” 的问题啦!以后不管你是开去山路绕弯的老家,还是雨雪纷飞的北方小城,甚至是胡同窄巷多的老城区,自动驾驶车都能快速 “ 入乡随俗 ”—— 就像刚到陌生城市的人跟着本地人逛几天就摸清门路一样,它跑个几公里就能懂这里的规矩:知道哪条路容易堵车该提前绕,知道哪片区域行人多要放慢速度,就算遇到突然窜出来的小孩、横穿马路的自行车,反应也会越来越快。而且它还不会 “ 学了新的忘了旧的 ” :在南方学会了怎么应对暴雨积水,到了北方遇到大雪结冰也不会慌;在城里懂了避让行人、礼让斑马线,上了高速也记得保持安全车距。慢慢地,不管是极端天气,还是各种 “ 奇葩路况 ” (比如路边突然卸货的货车、临时封路的施工区域),它都能稳稳应对。更关键的是,以后买自动驾驶车,就像带回一个会 “ 越长越聪明 ” 的伙伴。不用麻烦人去教它新东西,它自己在路上跑得多了,就越懂路、越安全。说不定再过十年,不管是跨城自驾游,还是早晚高峰通勤,咱们坐进车里,只需要说一句 “ 去公司 ”“ 回老家 ” ,就能闭眼放松刷手机、听音乐,到点就稳稳到达目的地 —— 没有手忙脚乱,没有突发状况慌神,这才是自动驾驶最该有的样子呀!你有没有发现,现在的自动驾驶汽车总有点 “ 水土不服 ” ?在上海开得好好的车,一送到路况复杂的重庆或者大雪纷飞的北方,可能就突然变 “ 笨 ” 了。这是因为现在的自动驾驶大脑大多是 “ 死读书 ” :在工厂里对着一大堆历史数据学完了,考试合格就出厂。一旦到了新环境,遇到没见过的新情况,它就转不过弯来。由复旦大学牵头的研究团队最近出了个新招,他们研发了一套叫 OEL-AD ( Online Evolutionary Learning for Autonomous Driving ,自动驾驶在线进化学习) 的系统。简单来说,就是给汽车装上了一个能 “ 边开车边进化 ” 的聪明大脑,让它具备 “ 在线自适应 ” 能力 —— 通过自监督的方式,在行驶中实时纠错、持续优化,越开越聪明。这就好比一个学生,在学校里背熟了所有的交通规则和地图,可一上路发现,现实里的司机不按套路出牌,路边的树影、奇怪的弯道都和书里不一样。因为它的知识是 “ 冻结 ” 的,面对新环境只能 “ 抓瞎 ” 。研究人员想:能不能让车像老司机一样,在陌生的路段开上几公里,自己就能摸透这里的 “ 脾气 ” ?这套新系统是怎么让车自我进化的呢?其实就三步,跟咱们人学开车很像:- 第一步:感觉不对,立刻 “走心” 平常路况熟的时候,车就按常规模式开。但如果系统发现前面的路况让自己 “心里打鼓”、拿不准主意了,它就会立刻切换模式,开启 “深度学习”,把注意力集中起来。
- 第二步:抓重点,别分心 路边的小草在动、远处的护栏是什么样,这些都不重要。系统会像老司机一样,死死盯着前方正准备变道的那辆车,或者突然窜出来的行人。只把精力花在最关键的变量上,这样既省力又高效。
- 第三步:用 “马后炮” 式教学法自我纠正 这是最聪明的一招。系统会一边开一边做预判,比如: “ 我觉得前面那辆车 1 秒后会往左拐。 ” 等 1 秒钟过去,它会看看那辆车实际往哪拐了。如果猜错了,它不需要人类教练提醒,自己就会拍大腿: “ 哎呀,看错了,下次我得这么修正预判。 ” 通过这种 “ 拿未来的事实来修正过去的猜测 ” 的方法,车开得越久,预判就越准。
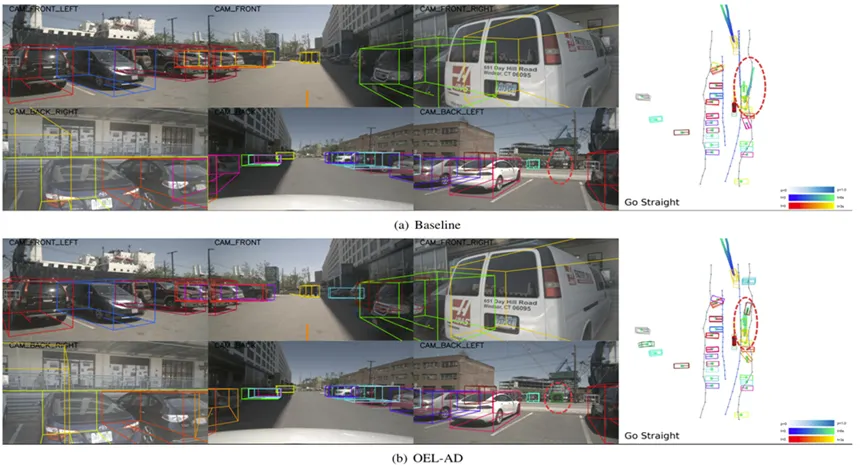
图 3 : OEL-AD 系统工作原理示意图:感知 - 决策 - 校正闭环研发团队把这套系统放在模拟测试里,让它从规规矩矩的狮城新加坡, “ 瞬移 ” 到道路狭窄、地形复杂的波士顿。结果发现: 刚开始车也懵,但在开启了 “ 边开边学 ” 模式后,它对周围物体的识别越来越准,开车习惯也迅速向当地老司机靠拢。最硬核的数据: 在极其危险的场景下,发生碰撞的概率比普通的自动驾驶整整降低了三成多!图 4 : OEL-AD 系统在不同城市环境中的性能提升对比这项技术的出现,打破了一个迷思:自动驾驶并不是在出厂那天就完美了。过去,我们需要成千上万的人工去给视频打标签、告诉电脑这是车那是树;现在,车可以利用 “ 时间 ” 这个免费的老师,在行驶中自我升级。当然,这项技术还在起步阶段。以后还要解决它会不会 “ 学了新词忘了旧词 ” 、在暴雨大雪天表现如何等问题。总结一下 : 未来的自动驾驶汽车,不再是工厂流水线上的标准化产品,而是一个会成长的 “ 数字生命 ” 。它出厂的那一刻,才是它进化的起点。开过一万公里、十万公里后的它,会比刚出厂时更懂路,也更安全。这才是我们想要的、真正有灵性的 “ 人工智能司机 ” 。








 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
