芝能科技出品
在L4无人驾驶级别的自动驾驶系统,通常会想到摄像头、雷达、算法和算力这些“高大上”的东西。
但现实里,有些被忽略细节往往会决定“成败”,那就是传感器能否看清外部环境。下雨天泥水飞溅、雪天路面结冰、清晨雾气弥漫,如果传感器表面覆盖灰尘或水滴,特别是无人看管的L4 Robotaxi整个系统就可能“短路”,再强大的算法也没用。
于是,一套看似不起眼的清洗系统,成了智能驾驶车辆可靠性的隐形保障。从“喷水擦玻璃”到液体与气流结合、硬件与控制协作、加热与传感同步的复杂工程。
我们来聊聊现代汽车清洗系统的方方面面,让大家看看这些不起眼的小部件,如何守护车的“眼睛”。
现代车辆的清洗系统已经不止是挡风玻璃专属。摄像头、激光雷达、大灯乃至部分车窗,都需要被及时清洁,否则信号衰减会直接影响驾驶辅助功能。
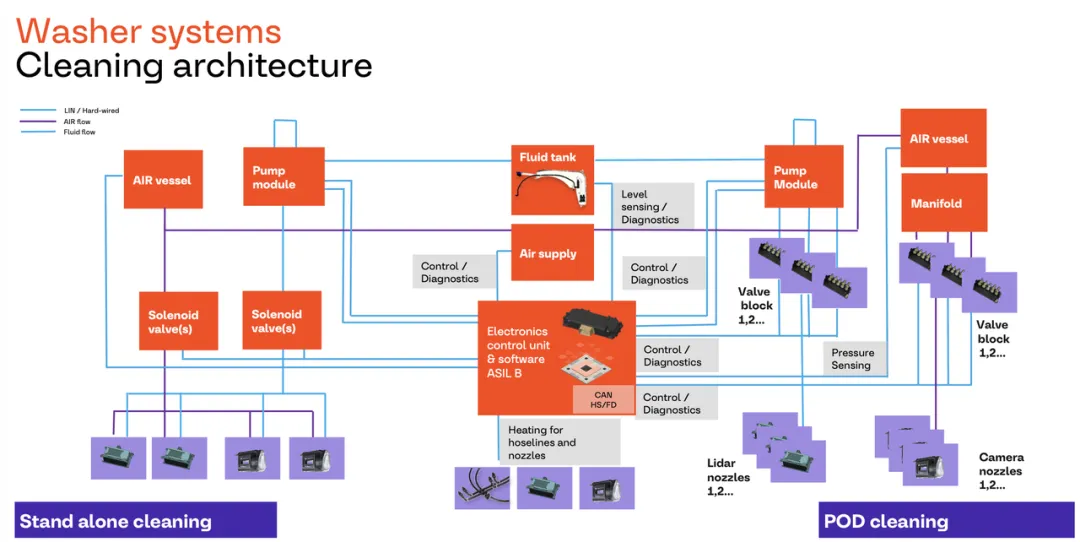
为此,清洗系统被设计成液体和气流双路协作,硬件和控制单元紧密配合。
硬件部分包括:泵、软管、储液罐、阀组和喷嘴。
◎ 泵通常采用BLDC无刷电机,保证高效率和耐久性。
◎ 软管材质经过优化,有波纹和光滑两种形式,部分还使用激光焊接的专利接头,提高耐压和耐磨性能。
◎ 喷嘴设计丰富:有可加热和非加热版本,喷射方式可调,既可以形成连续水柱,也可以产生雾状喷雾,甚至可集成在雨刮臂中,最大化节省空间。
◎ 大灯清洗则分伸缩式和固定式,搭配高压泵和软管,实现局部高压清洗。
在传感器清洁技术上,摄像头和激光雷达尤其考验工程师的想象力。
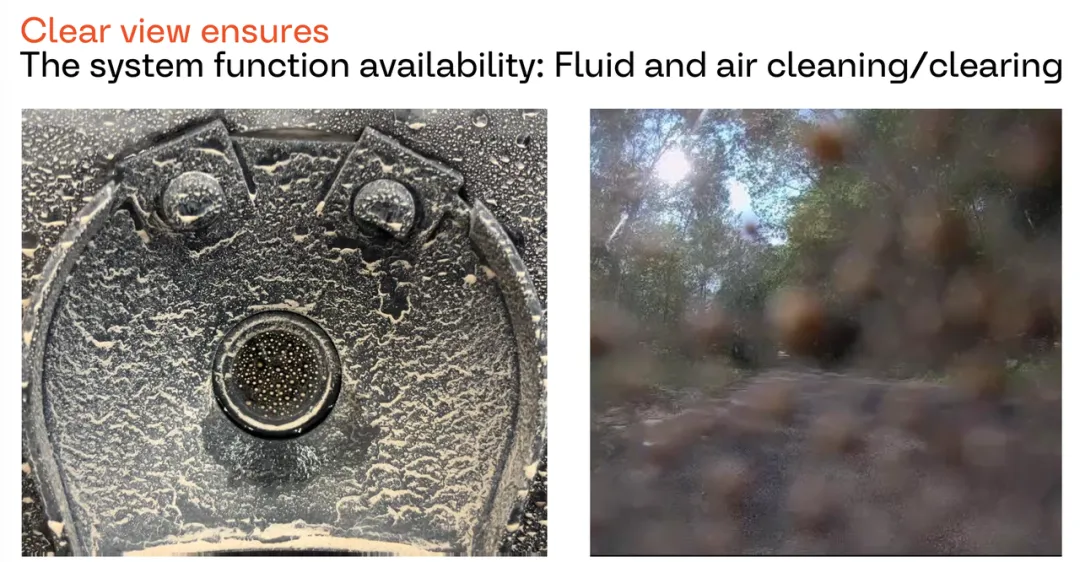
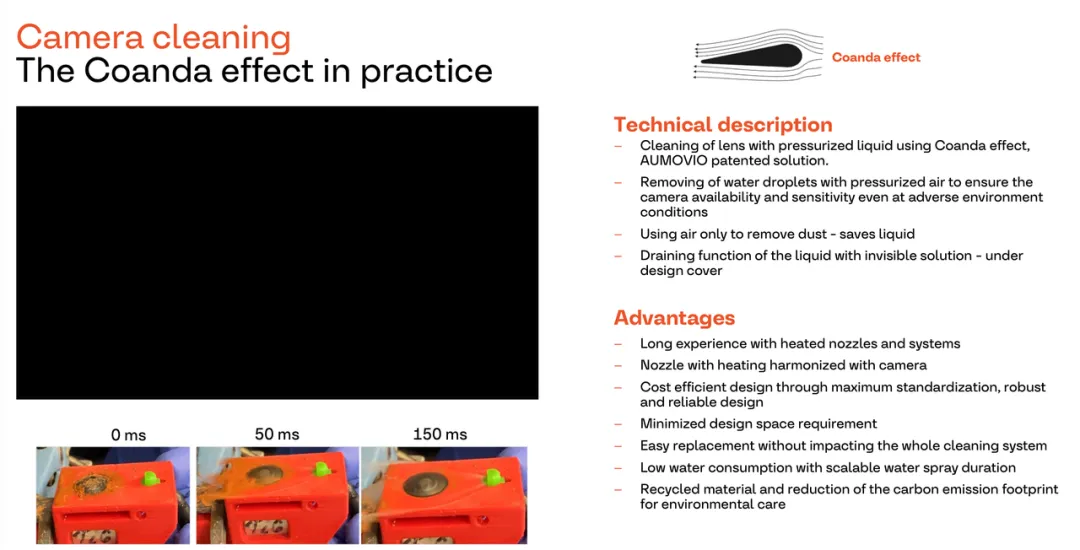
◎ 摄像头镜头多采用柯恩达效应(Coanda Effect),利用高压空气或液体沿曲面流动,将灰尘和水滴带走。
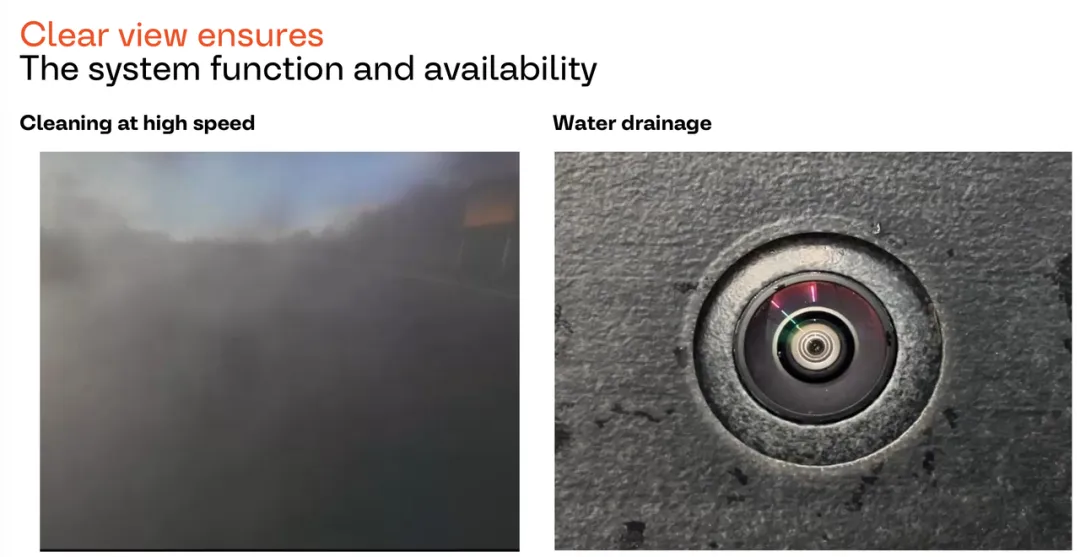
空气清洗可以节约液体,而液体喷洗则能去除顽固污渍。为了保证低温环境下也能工作,喷嘴和液路加热成为标配,避免结冰。
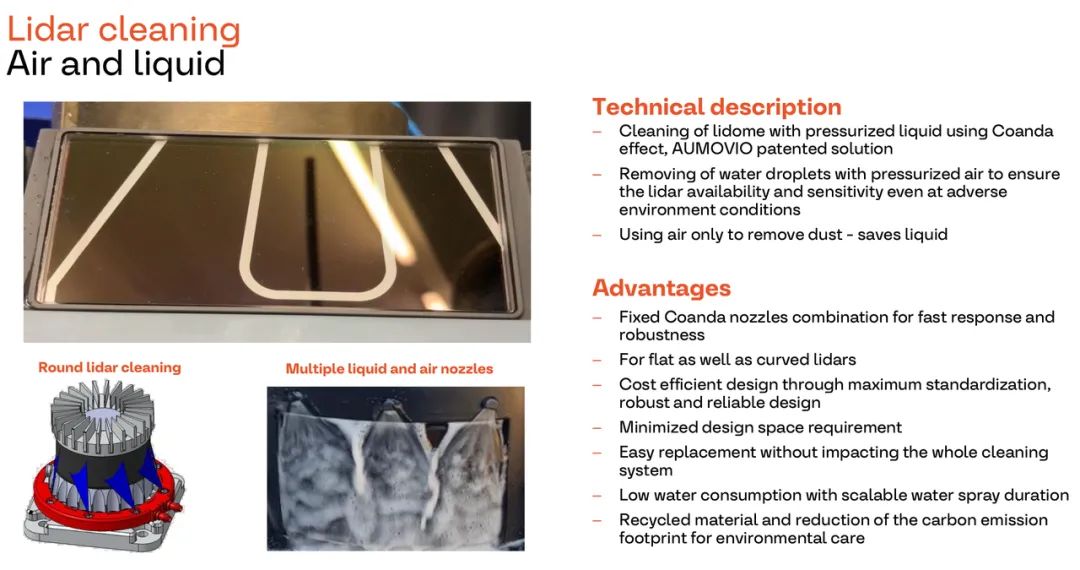
◎ 激光雷达清洗同样采用柯恩达双喷嘴设计,覆盖平面和曲面,保证雷达罩无死角。
控制系统是另一大核心。
清洗系统配备独立电控单元(SCSC),可以管理泵、阀门和压缩空气,实时监测液位和压力,自动触发清洗动作。系统可以配置为多单元协作,在传感器数量多的自动驾驶卡车上,实现多镜头同步清洗。
这套控制逻辑的目标很明确:保证最短再生时间和最低液体消耗,同时在高速行驶或恶劣天气下维持传感器可用性。
通讯协议通常采用LIN或CAN-FD,安全等级达到ASIL B,防护等级IP6K9K。
清洗系统的价值在实际使用中体现得最明显。
想象一辆自动驾驶卡车在泥泞工地穿行,车头摄像头和激光雷达表面覆盖泥浆,如果没有液气组合清洗,雷达可能读不到障碍物,摄像头图像模糊,自动驾驶功能可能受限。
双回路清洗系统通过泵送液体清除泥土,同时空气喷射吹干残留水珠,传感器迅速恢复清晰视野。
在冬季低温环境下,液路加热功能可以防止喷嘴结冰,保证清洗动作及时完成。系统还能根据传感器反馈自动判断脏污程度,自动触发清洗或加大喷射力度。这样一来,无论是高速上溅起的雨水,还是停车等待时积雪,都不会干扰驾驶辅助系统工作。
从性能角度看,液气组合清洗系统兼顾清洁效率与液体节约,标准化设计使得维护和更换方便,同时支持定制化以适配不同车型。喷嘴隐藏设计、低液体消耗和再生材料的使用,也体现了环保考量。
在未来,随着车辆传感器数量增加,这类系统将愈发复杂,但核心目的始终不变——保证传感器始终保持清晰,就像给车配了一双随时干净的“眼睛”。
在L3和L4级别的自动驾驶,清洗系统就不是不起眼的小配件,它是底层保障。再高端的摄像头和雷达,如果看不清路面,也等于白搭。
液气结合、加热喷嘴、自动脏污检测、模块化控制单元……每一环都在确保传感器在雨雪泥泞里保持清晰。