5年之约!他携全新力作《自动驾驶仿真测试入门:CARLA实战》重返仿真秀
- 2026-04-17 23:57:25
5年之约!他携全新力作《自动驾驶仿真测试入门:CARLA实战》重返仿真秀
作者 | 仿真助手 首发 | 仿真秀App 
5年前,他告诉我,他要离开CAE行业,并撰稿让无数CAE从业者动容。彼时的他,已在CAE领域深耕数年,手握整车自动化建模系统研发的亮眼成果,却毅然跳出舒适区,转身奔赴自动驾驶这一新兴赛道。 5年间,他褪去青涩,深耕不辍,从CAE领域的技术达人,成长为自动驾驶仿真测试领域的实战派专家。如今,他携全新力作《自动驾驶仿真测试入门:CARLA实战》重返仿真秀,既是对过往转型之路的总结,更是为行业新人送上的一份实战指南,同步开启仿真秀2026CAE新书上市赠书活动,诚邀更多仿真优质内容创作者携手,共筑技术分享生态。 
我拿到他赠送的实体图书 01 自动驾驶仿真测试新书上市啦 近日,某仿真秀专栏作者给我发来一条消息,由他编著,经人民邮电出版社公开出版发行《自动驾驶仿真测试入门:CARLA实战》,于2026年3月全面上市。 本书专注于自动驾驶仿真测试,以CARLA为基础,探讨什么是仿真测试、为何需要仿真测试以及如何进行仿真测试;旨在通过系统的讲解,帮助读者全面掌握自动驾驶仿真测试的基本流程与方法。本书特别强调实践操作,提供了丰富的代码实例,让读者可以利用Python基于CARLA编程完成各种仿真任务,并模拟实现多种自动驾驶功能。总之,本书不仅可以作为希望进入自动驾驶仿真领域的新手快速入门的参考书,还可以作为CARLA用户的参考资料。 福利时间到:即日起至4月12日,在本公众号评论区留言,点赞排名前3名读者可免费获赠《自动驾驶仿真测试入门:CARLA实战》。另选取2位评论区留言的幸运用户获得此书(仿真秀VIP群用户优先)。此外加入仿真秀仿真技术交流群,能获得专属75折购买链接—请识别下方二维码进群领取(还可与同行交流)。 
02 这本图书怎么样? 本书规划了从基础知识入门到实战进阶的完整学习流程,读者只要按顺序踏实学习,就能充分掌握CARLA的自动驾驶仿真测试之道。书中内容分为四个部分:基础知识与CARLA入门、CARLA客户端编程实战、工程化与标准集成、软件测试体系。 1、基础知识与CARLA入门 开篇部分包含第1章和第2章。首先从宏观视角讲解自动驾驶测试的三支柱法,即开放道路、封闭场地与虚拟仿真三者的互补关系。随后深入拆解仿真测试的四大应用分类,包括MIL、SIL、HIL和VIL,让读者理解不同阶段仿真的适用场景与价值。 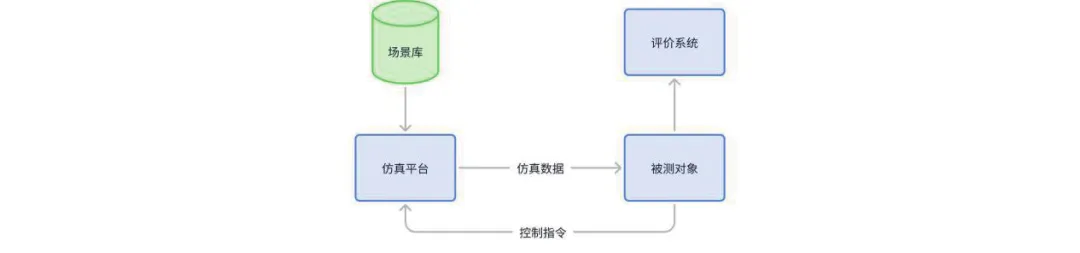
▲自动驾驶仿真测试的基本流程 接着从零起步说明如何把CARLA跑起来。书中详细列出了CARLA对软硬件的具体要求,介绍了下载与安装过程,指导读者完成服务端的启动、客户端的连接,并对基础界面进行简单探索,确保能顺利运行第一个仿真环境,实现零门槛入门。 2、CARLA客户端编程实战 这部分涵盖第3章至第6章,是CARLA实战的核心内容。 ● 传感器仿真 书中逐一拆解了自动驾驶主流的传感器类型,包括相机、激光雷达、毫米波雷达、GNSS和IMU。读者将掌握如何为车辆配置这些传感器,以及如何获取和理解它们输出的数据,最终实现一个完整的、可用于算法训练和验证的虚拟感知套件。 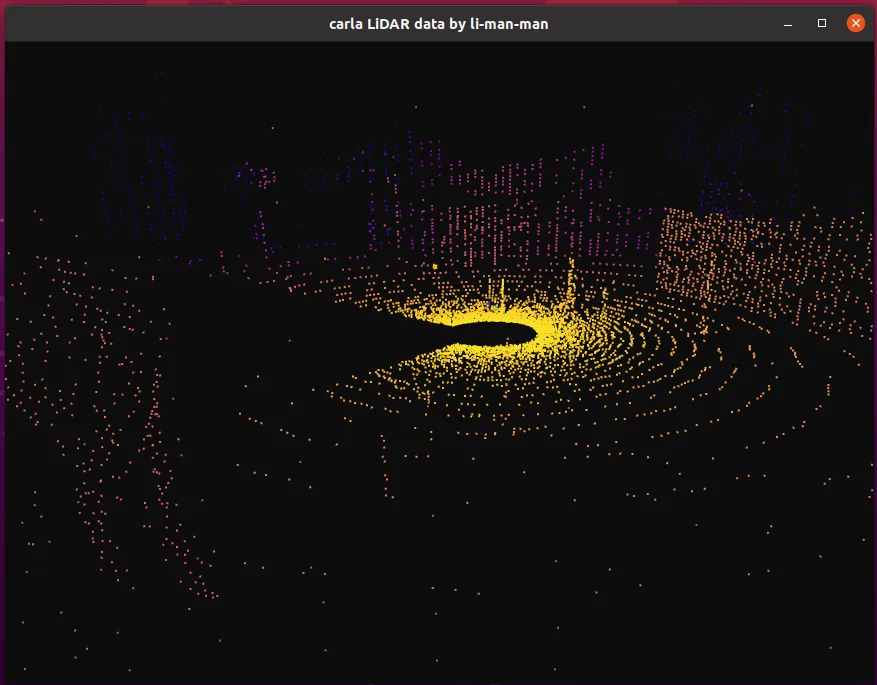
▲CARLA中激光雷达仿真的点云效果 ● 场景控制 深入讲解交通参与者的控制,包括如何生成车辆、行人及障碍物,并实现对它们运动状态的管理。介绍天气控制系统,自由调节昼夜、晴雨、光照等环境条件,构建多样化的仿真场景。 ● 闭环控制 首先是AEB自动紧急制动,从原理到代码,完整演示如何通过传感器检测障碍物并触发制动。其次是LKA车道保持,实现车辆对车道线的识别与自动纠偏。最后是ACC自适应巡航,让车辆能自动跟车并保持安全距离。 ● 过程控制 讲解如何通过渲染质量控制,在Epic模式、Low模式和无渲染模式间切换,以平衡画质与性能。重点对比同步模式与异步模式的应用场景,并讲解如何对仿真过程进行开始、停止、暂停和步进控制。 介绍仿真过程的录制与数据回放技术,这对于复现问题、分析数据至关重要。 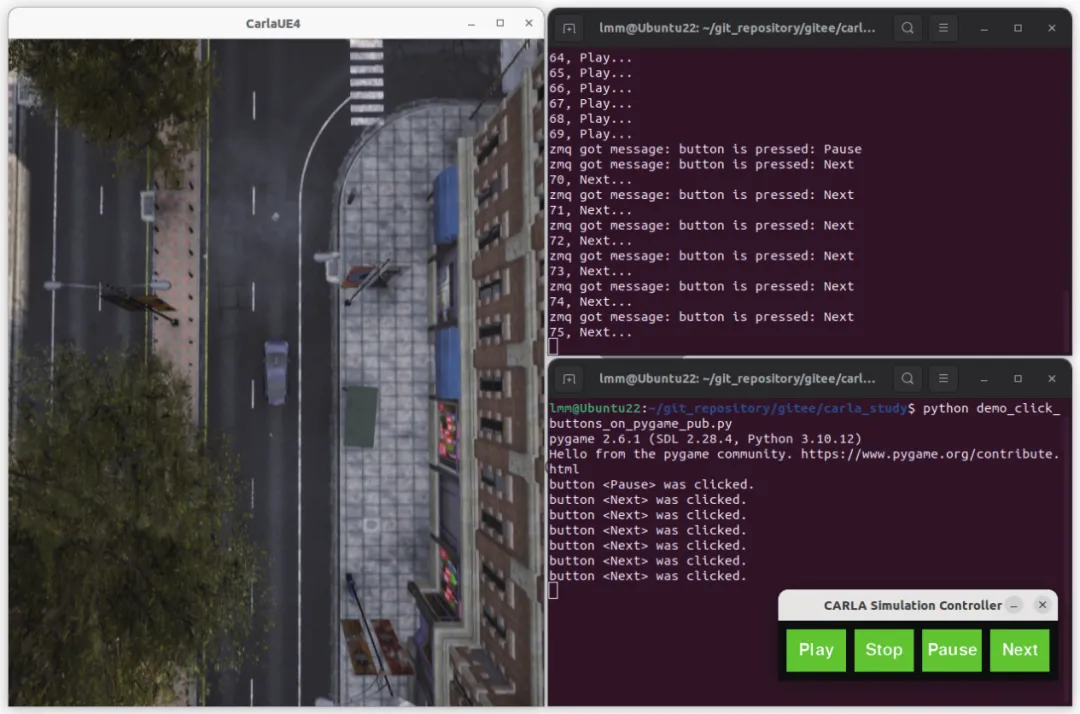
▲仿真的过程控制程序的运行效果 3、工程化与标准集成 这部分涵盖第7章至第10章,详细介绍了行业相关标准与工程化实施技术。 首先介绍ASAM OpenX系列标准的背景,重点讲解OpenDRIVE高精度地图和OpenSCENARIO场景描述文件的规范。随后,指导安装并使用ScenarioRunner工具,加载、运行官方标准场景,并进一步如何介绍编写和运行自定义的OpenSCENARIO场景。 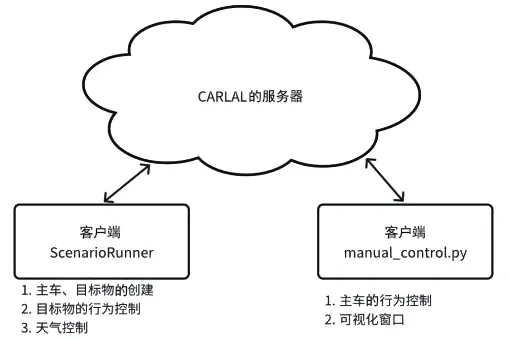
▲ScenarioRunner 运行 OpenSCENARIO 场景的逻辑图 再从ROS2的基础概念、安装配置开始,到节点定义、通信机制、自定义接口和可视化工具,内容层层递进。核心部分是CARLA ROS Bridge的部署与使用,通过实战案例,指导读者学习利用ROS2架构开发节点,让仿真环境能够无缝对接更复杂的自动驾驶算法系统。 介绍Docker的核心概念(包括镜像、容器和仓库)、Docker工具的安装和基础命令的使用;详细介绍如何获取和运行CARLA的Docker镜像,特别是如何配置英伟达GPU容器以保证仿真性能;简要介绍K8s(Kubernetes)技术。 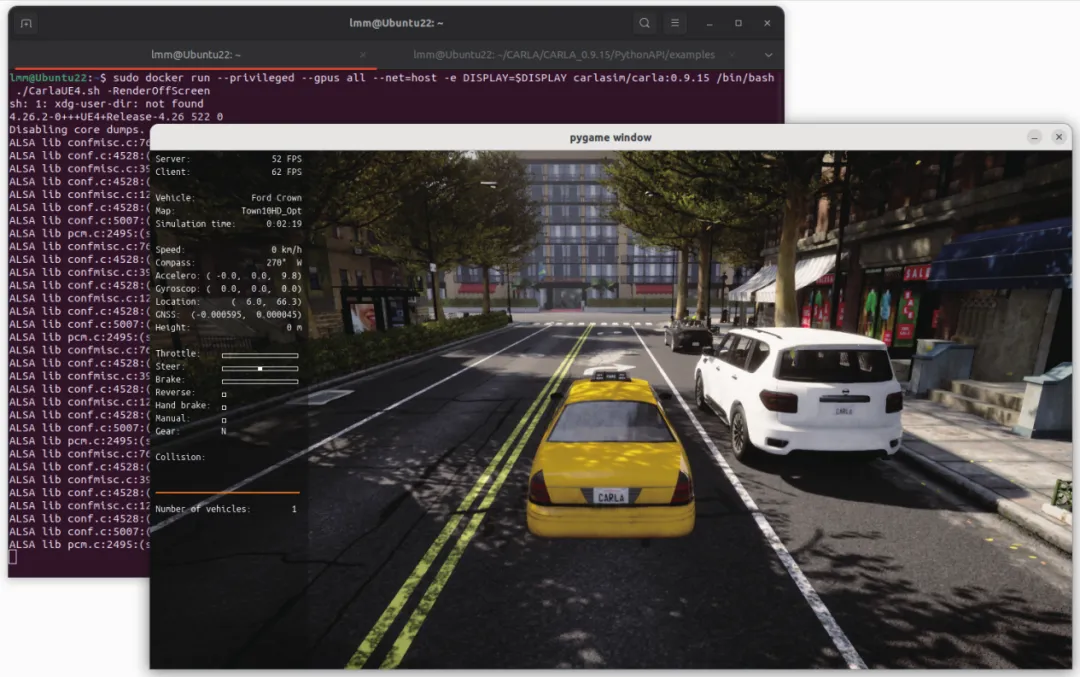
▲容器内的仿真器和容器外的客户端配合使用 本书还介绍了Autoware开源自动驾驶框架的发展版本和整体架构,并指导完成安装与试运行。讲解CARLA与Autoware的联合仿真,包括如何设计联合仿真框架、准备软件与镜像环境,并最终实现从感知、路径规划到车辆控制的全流程自动驾驶算法验证。 4、软件测试体系 系统梳理了自动驾驶软件测试的完整流程,包括需求分析、用例设计、测试执行和报告生成。详解如何根据项目需求来设计标准化、可复用、可量化的测试用例,并结合C-NCAP-AEB、IVISTA匝道汇入等真实行业测试案例,理解场景设计与验证的逻辑。 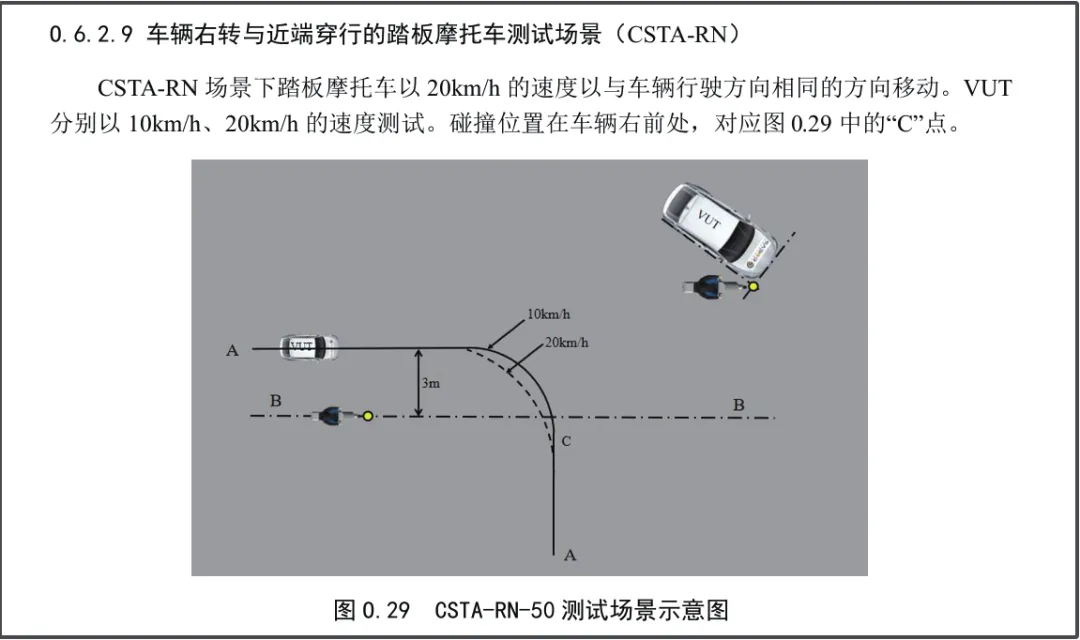
▲C-NCAP 中对 AEB 的测试内容 同时,该部分引入了CI/CD(持续集成/持续交付)的自动化测试理念,这是构建企业级自动化仿真验证体系的方法,使读者具备工程化测试的核心能力。 03 用户可以得到 本书涉及哪些技术栈 (1)CARLA :这是一款开源的仿真模拟器软件。 (2)Python :这是操作 CARLA 进行仿真模拟的脚本语言。 (3)OpenX :这是自动驾驶仿真领域的标准格式,本书主要针对 OpenDRIVE 和 OpenSCENARIO 两种格式进行介绍。 (4)ROS2:这是连接 CARLA 和自动驾驶软件的中间件操作系统。 (5)Docker :这是容器化管理工具,可帮助使用者自由封装仿真模拟器,以便大规模测试。 (6)Autoware :这是一款开源的自动驾驶软件,可作为被测对象。 04 图书作者-李慢慢转型之路 他本科机械设计制造及自动化、研究生车辆工程的专业背景,让他毕业后顺理成章进入上海某车企,深耕车身结构CAE模拟仿真领域,每天与钣金、焊点、材料选型打交道,在实验部与设计部之间搭建起验证优化的桥梁。但单调重复的工作的流程,让热爱创新、追求前沿的他逐渐感到迷茫——他渴望接触更具活力、更具挑战性的领域,而彼时机器学习、人工智能与自动驾驶的兴起,为他点亮了转型的方向。 他没有盲目跟风,而是凭借CAE领域积累的Python编程基础,从ANSA二次开发入手,优化工作流程,开发自动化建模与网格划分软件,不仅为公司申请了软件著作权,还联合团队打造整车自动化建模系统,斩获集团二等奖,这份成果也成为他转型路上最坚实的底气。他利用业余时间报班学习自动驾驶课程,开通公众号记录学习感悟,以“李慢慢”为笔名时刻提醒自己,慢慢来、沉下心,在梳理知识体系的过程中,逐渐完成从CAE工程师到自动驾驶从业者的蜕变。这份脚踏实地、乐于分享的态度,与仿真秀“赋能工程师成长”的理念高度契合,也让他成为平台上备受关注的技术创作者。 五年沉淀,厚积薄发。如今他携《自动驾驶仿真测试入门:CARLA实战》重返仿真秀,这本书既是他转型之路的实战总结,更是针对自动驾驶仿真测试入门者的“量身之作”。作为自动驾驶技术落地的核心环节,仿真测试凭借安全、高效、低成本的优势,成为衔接算法开发与实车测试的关键纽带,而CARLA作为开源、高保真的自动驾驶仿真平台,已成为行业内研发、测试与学习的主流工具。但目前市场上的相关书籍多偏向理论,缺乏贴合实战的操作指导,很多入门者面临“懂理论、不会操作”的困境,而李慢慢的这本书,恰好填补了这一空白。 
《自动驾驶仿真测试入门:CARLA实战》以“入门易懂、实战为王”为核心,打破理论与实践的壁垒,从自动驾驶仿真测试的基础概念入手,逐步深入CARLA平台的实操应用,覆盖平台安装、基础操作、场景搭建、传感器配置、路径规划与轨迹跟踪等核心内容,更包含多个真实仿真实例,手把手指导读者完成从环境搭建到测试验证的全流程操作。书中融入了李慢慢多年的实战经验,既讲解技术要点,也分享避坑技巧,无论是刚入门的自动驾驶从业者、在校学生,还是希望转型自动驾驶领域的CAE工程师,都能从中获得实用的技术指导。 
值得一提的是,这本书的创作初心,与李慢慢五年前分享ANSA二次开发宝典的初心一脉相承——“把实战经验分享给更多人,助力行业新人少走弯路”。五年前,他留下的ANSA二次开发宝典,帮助无数CAE从业者提升工作效率、实现技能突破;五年后,他带来的CARLA实战指南,将助力更多人快速入门自动驾驶仿真测试,打通技术落地的“最后一公里”。这种乐于分享、赋能同行的精神,正是仿真秀平台所倡导的,也是我们一直以来深耕技术分享生态的核心动力。 05 仿真秀CAE新书推荐活动 五年迭代,初心未改;技术深耕,薪火相传。李慢慢从CAE到自动驾驶的转型之路,告诉我们:选择大于努力,坚守成就成长,而乐于分享,方能成就更远的未来。如今,《自动驾驶仿真测试入门:CARLA实战》已正式上市,既是一份实战指南,也是一份成长礼物;既是李慢慢五年沉淀的成果,也是仿真秀技术生态的又一重要补充。 李慢慢老师的成长与收获,正是平台赋能创作者的生动缩影,我们期待与更多优秀创作者携手,打造一个有温度、有干货、有成长的技术分享社区,助力中国工业技术的进步与发展。 与此同时,仿真秀平台也正式诚邀更多像李慢慢老师一样的技术作者、创作者加入我们!无论你深耕CAE、自动驾驶、工业仿真等哪个领域,无论你拥有实战经验、理论成果还是技术感悟,只要你愿意分享,我们都将为你提供全方位的推广支持——平台流量倾斜、图书出版、新书首发推广、线上直播联动、粉丝精准触达,助力你的作品被更多人看见,让你的技术价值得到最大化体现。 2025年仿真秀APP公众号新书上市评论赠书100多本,今年继续加大与出版社合作,为平台用户不仅免费赠书,还会推出专属长期优惠,最低至5折。让用户在仿真秀平台获得更多福利和实惠。 仿真秀学习资料包 仿真秀,致力于为每一位学习者提供优质的仿真资源与技术服务支持,让您的仿真学习之旅更加顺畅,欢迎在公众号对话框与我互动交流!以下资料供用户永久免费下载哦(见下图)。 
下载地址:在仿真秀APP公众号菜单-资料库-资料下载-进入百度云盘群下载,不会失效,且永久免费更新(注意在云盘群搜索文章标题,找到对应的资料或者模型自行下载即可,群满员请联系官方客服更新即可)。 相关内容推荐 CFD新书上市《STAR-CCM+多学科仿真和优化》评论赠书 新书上市《玩转高速电路:基于ANSYS HFSS的无源仿真实例》评论赠书 广州大学江帆教授《COMSOL工程传热与相变实战》新书上市线上沙龙 新书上市《ANSYS Workbench 2024工程应用与实例解析》评论赠书 新书上市:ANSYS Workbench2024高阶应用与实例解析-评论赠书 新书上市:archelios光伏及其储能电站三维设计与仿真(评论赠书) 新书上市-ANSYS Workbench2024从基础到实战-评论赠书 新书上市《GT-AutoLion锂离子电池仿真分析与实例解析》评论赠书 评论赠书-王洪伟老师编著《气体动力学原理和方法》新书上市 新书上市《计算流体力学大串讲》轻松解锁CFD从公式到代码-评论赠书 (完) 声明:本文首发仿真秀App,部分图片和内容转自网络,如有不当请联系我们,欢迎分享,禁止私自转载,转载请联系我们。欢迎投稿,投稿与技术交流请联系杨老师18610516616(微同) 

 喜欢作者,请点赞和在看
喜欢作者,请点赞和在看
喜欢作者,请点赞和在看
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 从“扛把子”到21万台,现代轿车这三十年我帮你捋清楚了
- 6座SUV比5座实用,看看这两款,2+2+2布局、配置多还省油!
- 2026款比亚迪大唐七座SUV来了,车长5.2米+闪充技术,3.9秒破百,真的太顶了!
- 以万变,应万变 梅赛德斯-奔驰GLB SUV
- 15万预算想买七座混动SUV?很多人忽略了这台福特
- 纽北赛道惊现中国红!千匹马力SUV硬刚保时捷,45万要创造历史?
- 定型机自动驾驶!宏大智慧科技织物定形机数字化控制技术入选国家节能降碳推荐技术
- 破局自动驾驶“烧钱困局”:小马智行锚定L4赛道,筑牢商业化基石
- 买燃油SUV肯定绕不开这两台加L的SUV,哈弗H6L和星越L怎么选?
- 惊掉下巴,远程协助冒充自动驾驶,某些人无脑崇拜的品牌,底裤被扒了!
