让无人机飞入自动驾驶世界:南科大开源CARLA-Air,一个进程搞定空地协同仿真
- 2026-04-16 02:42:15
 「空地一体化仿真平台」
「空地一体化仿真平台」
低空经济正在加速起飞,无人机配送、空中巡检、空地协同救援等场景层出不穷。但一个尴尬的现实是:当研究者需要让无人机和自动驾驶汽车在同一个城市场景中协同工作时,却找不到一个好用的仿真平台。
自动驾驶领域的"明星"仿真器CARLA,拥有逼真的城市街景和丰富的交通流,却飞不了无人机;无人机仿真器AirSim,飞行物理精确,却没有真实的地面交通和行人。
以往,研究者只能用"桥接"的方式把两者勉强拼在一起,但跨进程通信带来的延迟和时空不一致,让精密的空地协同实验几乎无从谈起。
为了彻底打通天地之间的仿真壁垒,南方科技大学的研究团队联合深圳市机器人与计算机视觉重点实验室提出了CARLA-Air——一个在单个Unreal Engine进程中同时运行CARLA和AirSim的开源统一仿真平台,让空地协同的具身智能研究真正成为可能。
该项目发布当日即登顶 HuggingFace 每日论文关注榜首,并在数周内收获 GitHub 400+ Stars。研究团队已开源全部代码并提供预编译打包文件,下载后无需配置环境,一键即可运行(文末附链接)。
要理解CARLA-Air的核心创新,首先需要了解一个Unreal Engine 4(UE4)的底层限制:每个世界只能有一个活跃的Game Mode。CARLA和AirSim各自深度耦合了自己的Game Mode,如果简单地将两者塞进同一个UE4进程,必然有一方的Game Mode被覆盖,导致其API完全失效。
CARLA-Air的解法堪称精妙。研究团队设计了一个名为CARLAAirGameMode的统一游戏模式,它通过继承获得CARLA的地面子系统(交通管理、天气控制、行人行为等),同时通过组合将AirSim的空中飞行体(Aerial Flight Actor)作为普通的世界实体纳入其中。
这种"继承+组合"的设计哲学,仅修改了上游CARLA代码库约35行,就实现了两大仿真引擎在同一进程中的和谐共存。
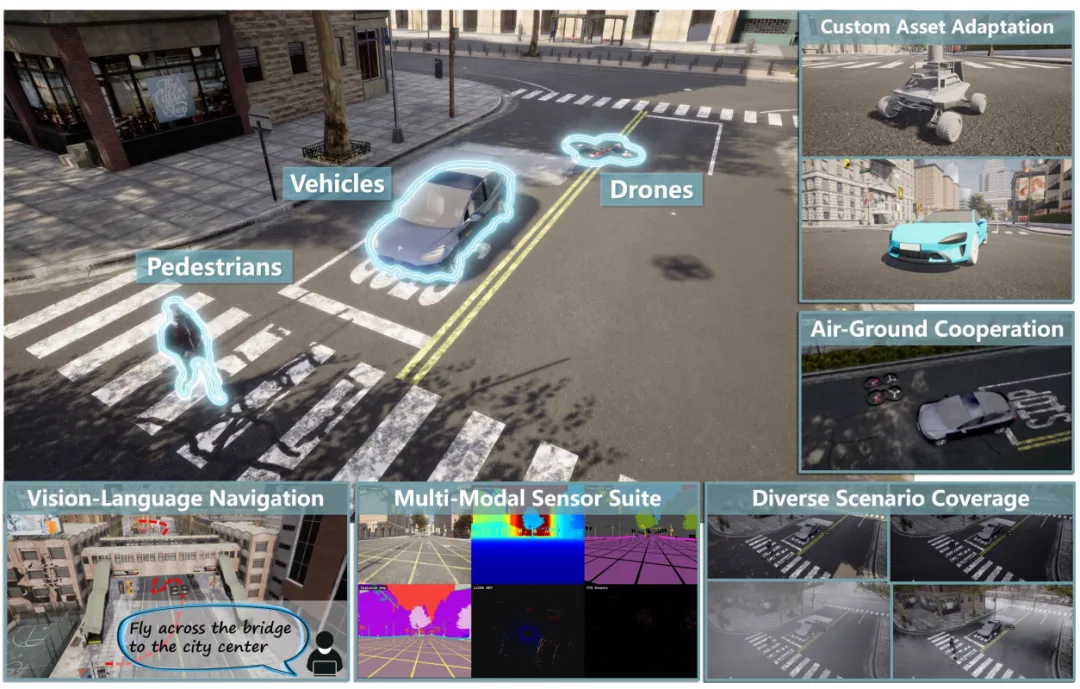
图1 | CARLA-Air统一仿真世界一览。在同一个高保真城市场景中,行人、车辆和无人机共享物理一致的仿真环境,右侧展示了平台支持的自定义资产导入和空地协同能力。这种"天地一体"的仿真世界,正是CARLA-Air的核心价值所在。©【深蓝 AI】编译
在运行时,CARLA-Air在单个UE4进程内同时托管CARLA RPC Server和AirSim RPC Server两个独立的通信服务端。研究者可以通过一个Python脚本同时驱动地面客户端和空中客户端,所有空中和地面平台在每个仿真Tick内同步采集数据,共享渲染管线、天气系统和物理时钟。
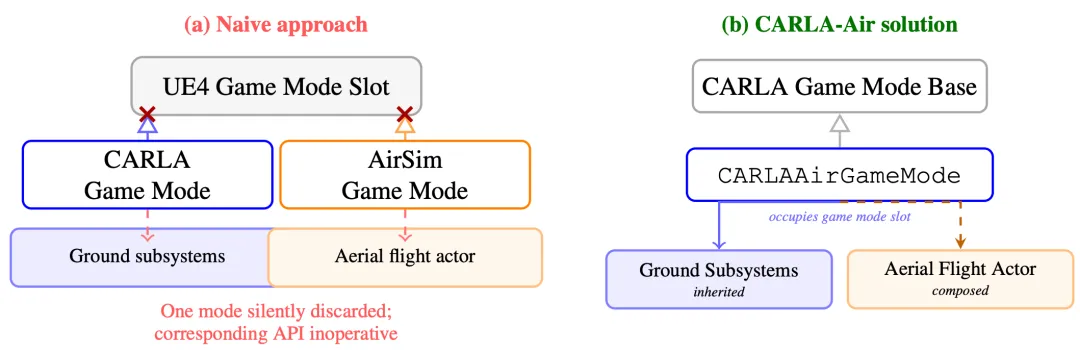
图2 | "一山不容二虎"的破解之道。左侧(a)展示了朴素方案的困境——两个Game Mode争抢唯一的槽位,必有一方被丢弃;右侧(b)是CARLA-Air的组合式解决方案——CARLAAirGameMode继承CARLA的地面子系统,同时将AirSim的飞行体以组合方式纳入,巧妙地在单个Game Mode槽位中容纳了两套完整的仿真能力。©【深蓝 AI】编译
对于已经在CARLA或AirSim上积累了大量代码的研究者来说,迁移成本是选择新平台时最大的顾虑。CARLA-Air在这一点上做到了极致:它完整保留了两个平台的原生Python API和ROS 2接口,研究者无需修改任何一行已有代码。
具体而言,CARLA的89项自动化API测试全部通过,AirSim的全部飞行控制和传感器访问API均已验证,平台还发布了63个ROS 2 topics(43个CARLA + 14个AirSim + 6个通用)。这意味着,无论是CARLA社区的manual_control.py手动驾驶脚本,还是AirSim的hello_drone.py基础飞行演示,都可以在CARLA-Air中直接运行。
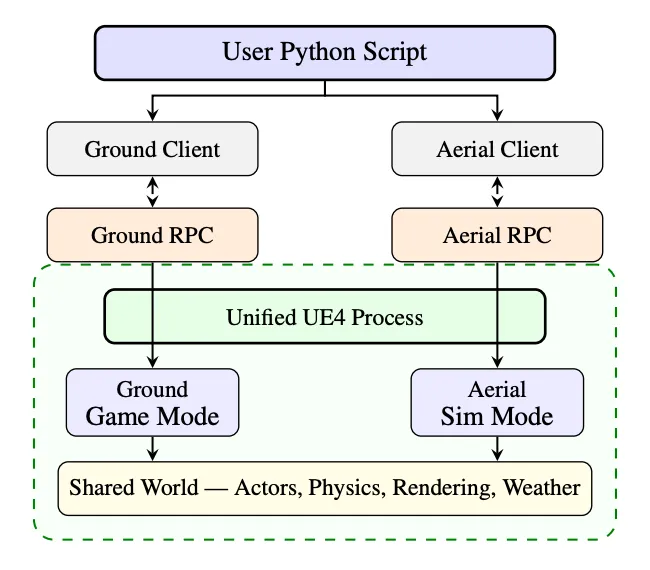
图3 | CARLA-Air运行时架构。单个UE4进程内同时托管两套RPC服务器,通过统一的CARLAAirGameMode实现共享物理Tick、共享渲染管线和共享天气系统。研究者只需一个Python脚本,就能同时操控地面车辆和空中无人机。©【深蓝 AI】编译
桥接式联合仿真的最大痛点在于跨进程通信延迟。由于CARLA和AirSim运行在不同进程甚至不同机器上,每次数据交换都需要经过序列化、网络传输和反序列化,往返延迟通常在1000到5000微秒之间,且无法保证两个仿真器的物理时钟严格同步。
CARLA-Air通过单进程架构彻底消除了这一瓶颈。实测数据显示,轻量级状态查询(如获取位姿)的API往返延迟仅为280到490微秒,Actor生成约1850微秒,图像捕获约3200微秒——所有操作均在同一进程的共享内存中完成,无需任何跨进程通信。更关键的是,由于共享同一个物理Tick,空中和地面传感器的数据在时间上实现了绝对同步,最大对齐偏差不超过1个Tick。
 图4 | ROS平台运行测试。 在RViz中同步可视化无人机与车辆的多模态传感器数据,无人机与车辆传感器均呈现出高度一致的视觉效果,充分验证了空地传感器之间出色的感知一致性。©【深蓝 AI】编译
图4 | ROS平台运行测试。 在RViz中同步可视化无人机与车辆的多模态传感器数据,无人机与车辆传感器均呈现出高度一致的视觉效果,充分验证了空地传感器之间出色的感知一致性。©【深蓝 AI】编译
在具身智能和多模态感知研究中,构建大规模的配对数据集是训练模型的关键瓶颈。CARLA-Air支持多达18种传感器模态的同步采集,包括RGB相机、深度图、语义分割、实例分割、表面法线、LiDAR点云、LiDAR鸟瞰图、雷达、IMU、GNSS、气压计等。
 图5 | 无人机追踪卡车任务中的机载传感器数据采集可视化。 上方为三路RGB相机合成的全景图像,下方依次为深度图、语义分割图及机载LiDAR点云。所有传感器数据均可同步采集与落盘,内外参保持稳定,时间戳严格对齐。©【深蓝 AI】编译
图5 | 无人机追踪卡车任务中的机载传感器数据采集可视化。 上方为三路RGB相机合成的全景图像,下方依次为深度图、语义分割图及机载LiDAR点云。所有传感器数据均可同步采集与落盘,内外参保持稳定,时间戳严格对齐。©【深蓝 AI】编译
在一次典型的数据采集实验中,平台以17.1 FPS的帧率同时运行12路传感器流(6路车辆视角 + 6路无人机视角),持续采集1000个Tick的数据,每个Tick的写入延迟仅为61±9毫秒,且全程零RPC错误。

图6 | 单Tick内同步采集的12路多模态传感器流。上排为地面车辆视角,下排为无人机鸟瞰视角,从左到右依次为RGB、语义分割、深度图、LiDAR鸟瞰、表面法线和实例分割。由于共享同一个渲染管线和天气条件,所有数据在时空上实现了"零误差"对齐。©【深蓝 AI】编译
CARLA-Air的性能评估在NVIDIA RTX A4000(16GB显存)、AMD Ryzen 7 5800X和32GB内存的硬件配置上进行。
在帧率方面,地面单独运行时为28.4 FPS,空中单独运行时为44.7 FPS,空地联合运行时为19.8±1.1 FPS。集成带来的帧率开销约为30.3%(8.6 FPS),其中2.1 FPS归因于地面共存,6.5 FPS归因于空中物理引擎的计算。值得注意的是,当车辆数量翻倍进入交通监控模式时,帧率几乎不变(20.1 FPS),说明平台对Actor数量具有良好的扩展性。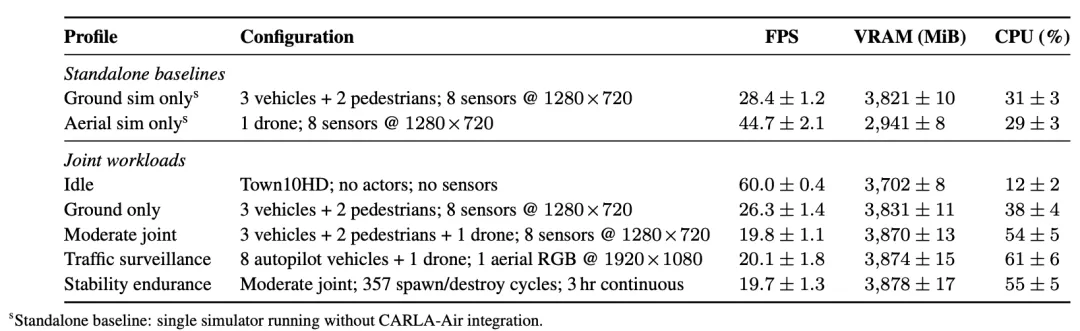
图7 | CARLA-Air稳定性测试量化结果。 经过三小时无人机、车辆、行人及传感器的持续创建与销毁压力测试,CARLA-Air全程保持稳定运行,无任何卡顿或报错,最低帧率维持在19.7 FPS。这一长时复杂任务下的稳定性表现,使CARLA-Air能够胜任数据采集、在线强化学习等长周期任务场景。©【深蓝 AI】编译
在稳定性方面,平台经历了长达3小时的耐久测试,期间完成了357个Actor生成/销毁周期,帧率始终稳定在19.7±1.3 FPS,显存无显著累积(线性拟合R²仅0.11),全程零API错误、零仿真崩溃。
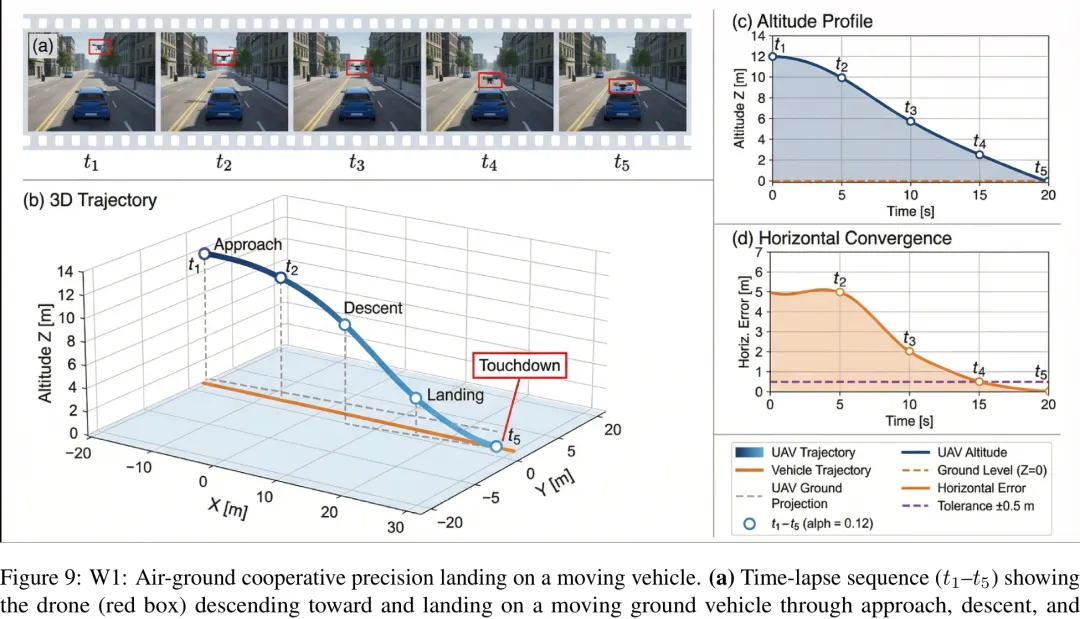
图8 | 空地协同精准降落全过程。(a)时序图展示了无人机从接近到触地的五个关键时刻;(b)3D轨迹显示无人机轨迹(蓝色)逐步收敛到车辆轨迹(橙色);(c)高度曲线记录了从12米到地面的平滑下降过程;(d)水平误差从约6米迅速收敛至0.5米以内。整个过程以19.3 FPS运行,耗时约20秒,零RPC错误。©【深蓝 AI】编译
在具身导航方面,CARLA-Air还展示了支持视觉语言动作(VLA)数据生成的能力。无人机可以在城市上空自主跟踪行人,每一帧都伴随着链式推理(Think/Action)的注释,为训练具身导航大模型提供了丰富的标注数据。
图9 | 无人机自主跟踪行人的视觉语言导航演示,无人机与行人飞别用蓝色框与红色框标记,无人机接受的指令为“跟随在行人后方,保持行人位于相机画面中心”。该过程展示了CarlaAir平台在生成VLA训练数据,验证空地协同VLA算法以及进行在线强化学习方面的潜力。©【深蓝 AI】编译
CARLA-Air的出现,代表了仿真基础设施从"单域专精"向"跨域融合"演进的重要趋势。它以极其优雅的工程设计——仅修改约35行上游代码——就打通了地面驾驶与空中飞行之间的仿真壁垒,为空地协同、跨视角感知、具身导航和强化学习等前沿方向提供了统一的实验底座。
随着低空经济的蓬勃发展和具身大模型的快速演进,空地协同智能正在从学术概念走向工程落地。CARLA-Air作为一个完备的开源项目,是否会成为这一领域的"标准基础设施"?
REF
•论文标题:CARLA-Air: Fly Drones Inside a CARLA World — A Unified Infrastructure for Air-Ground Embodied Intelligence
•论文链接:https://arxiv.org/abs/2603.28032
•项目主页:https://github.com/louiszengCN/CarlaAir
商务推广/稿件投递请添加:xinran199706(备注商务合作)



· 计划周期:深蓝学院将以3个月为一个周期,建立工程师&学术研究者的「同好社群」
· 覆盖方向:自动驾驶、具身智能(人形、四足、轮式、机械臂)、视觉、无人机、大模型、医学人工智能……16个热门领域
扫码添加阿蓝
选择想要加入的交流群即可
(按照提交顺序邀请,请尽早选择)
👇

随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 无论是路虎的豪华SUV,还是大众的经典轿车,这套座垫实现了1:1原车版型适配
- 豪华纯电 SUV!奔驰长轴距纯电 GLC 三季度上市,800V 平台、CLTC 续航 650km、50 万级
- 聊城到唐山,轿车托运费用,比你想象的更便宜
- 北京房山流动补胎电气焊大小货车小轿车补胎电气焊24小时救援15703204233[握手]
- 鸡西开轿车逆行被举报处理曝光了!
- 比亚迪全新品牌领汇汽车首款纯电轿车e7将于4月15日发布,搭载闪充技术
- 险!轿车侧翻悬崖边一人被困 消防紧急救援
- 我在松林露营,天黑了,那辆白色轿车还不走,过去一看,让我大吃一惊
- 绍兴一轿车翻滚冲下山脚,车体严重变形,现场一片狼藉
- 惊险!绍兴一轿车翻滚冲下山脚,三人受伤
