摘要:自动驾驶汽车在晚上怎么开车?它没有眼睛,怎么"看见"路?这篇文章给你答案。
开篇:一个未来的场景
想象一下:
深夜,高速公路上。
一辆自动驾驶汽车,以 120 公里的时速行驶。
车内没有司机,方向盘自己转动。
它怎么知道前面有没有车?
怎么知道路在哪里?
怎么在完全黑暗的环境中安全行驶?
这背后,是一套"超越人眼"的感知系统。
这篇文章,我们来揭秘自动驾驶汽车怎么"看见"夜晚。
一、人眼 vs 机器眼
先对比一下:
人眼怎么在晚上看路?
靠车灯。
车灯照亮前方,光反射回来,眼睛看见。
但车灯有局限:
照射距离有限,一般 100 米左右;
强光会眩目,对面来车开远光灯,你什么都看不见;
雨雾天,光被散射,能见度更低。
自动驾驶汽车不用人眼,它用"机器眼"。
机器眼有哪些?
主要有三种:摄像头、雷达、激光雷达。

图 1:自动驾驶传感器
二、摄像头:汽车的"眼睛"
摄像头,和人眼最像。
它记录光线,形成图像。
然后 AI 算法分析图像,识别车道线、车辆、行人、交通标志等。
摄像头的优点:
分辨率高,图像清晰;
能识别颜色,看懂交通信号灯;
成本低,技术成熟。
摄像头的缺点:
依赖光线,晚上效果差;
雨雾天,图像模糊;
强光眩目,暂时"失明"。
所以,单靠摄像头,自动驾驶汽车晚上开不了车。
需要其他传感器辅助。
三、雷达:穿透黑暗的"超能力"
雷达,英文叫 Radar。
它的工作原理很简单:
发射无线电波,碰到物体反射回来。
雷达接收反射波,计算物体的距离和速度。
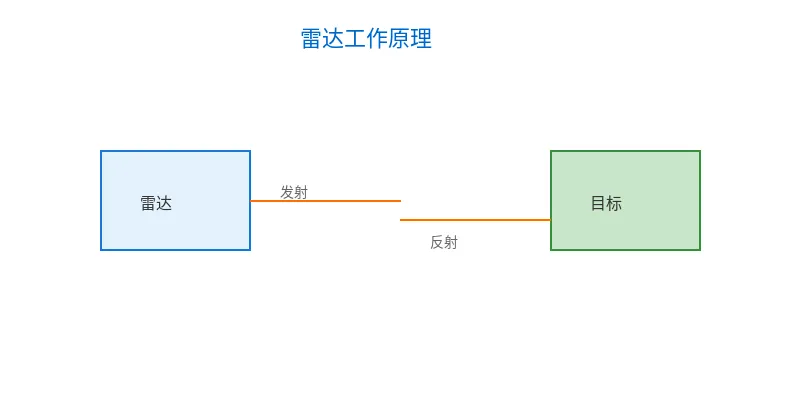
图 2:雷达工作原理
雷达的优点:
不依赖光线,白天晚上都能用;
穿透能力强,雨雾天也能工作;
测速准确,能知道前车开多快。
雷达的缺点:
分辨率低,看不清物体细节;
识别不了颜色,看不懂交通灯;
对静止物体不敏感。
所以雷达主要用于测距和测速,比如自适应巡航、紧急制动。
四、激光雷达:高精度的"3D 眼睛"
激光雷达,英文叫 LiDAR。
它是雷达的"升级版"。
雷达发射无线电波,激光雷达发射激光。
激光的波长更短,精度更高。
激光雷达怎么工作?
发射激光脉冲,碰到物体反射回来。
记录激光往返的时间,计算距离。
同时,激光雷达会快速扫描,发射成千上万个激光点。
这些点组成一个"点云",形成周围环境的 3D 模型。
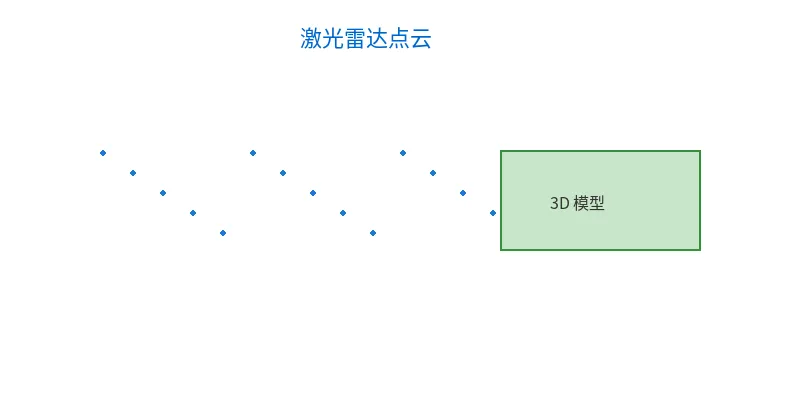
图 3:激光雷达点云
激光雷达的优点:
精度极高,能分辨几厘米的物体;
3D 成像,知道物体的形状和位置;
不依赖光线,晚上也能工作。
激光雷达的缺点:
雨雾天,激光被散射,性能下降;
对黑色物体不敏感,吸收激光。
五、多传感器融合:1+1>2
单一传感器都有局限,怎么办?
融合。
自动驾驶汽车同时用摄像头、雷达、激光雷达。
摄像头负责"看"——识别车道线、交通灯、标志;
雷达负责"测"——测距离、测速度;
激光雷达负责"建模"——构建 3D 环境模型。
然后,AI 算法把这些信息融合在一起。
就像一个团队,每个人负责不同的任务,最后汇总决策。
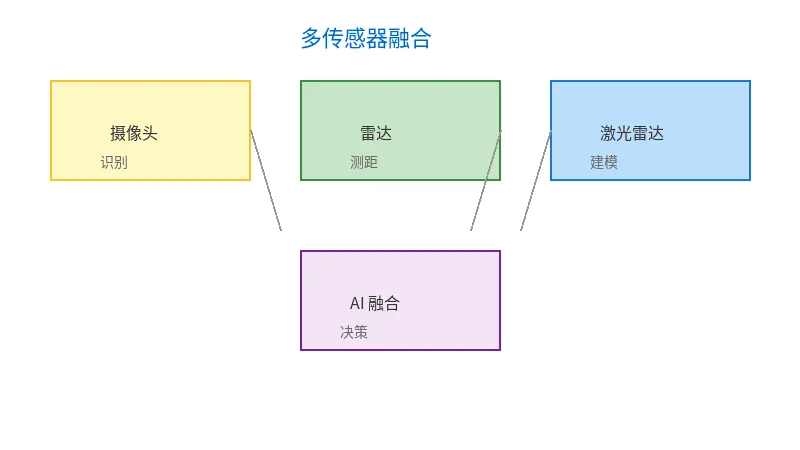
图 4:多传感器融合
多传感器融合的好处:
互补优势,弥补各自的不足;
冗余设计,一个传感器失效,还有其他传感器;
提高精度,多个数据源相互验证。
所以,自动驾驶汽车晚上能安全行驶,靠的不是单一技术,是多传感器融合。
结尾:技术,让出行更安全
自动驾驶汽车晚上能"看见"路,靠的是多传感器融合。
摄像头、雷达、激光雷达,各展所长,互补不足。
这,就是技术的智慧——
不是追求单一技术的极致,而是系统的协同。
而这一切的目的,是让出行更安全。
据统计,90% 的交通事故是人为失误造成的。
自动驾驶,就是要减少人为失误。
技术,守护生命。
这,也是"逐光"的意义。
逐光科普
用大白话讲清楚光学黑科技
中智科仪 · 超快成像技术引领者
📌 关注我们,获取更多光学知识
点击标题下方"逐光科普" → 关注公众号
© 2026 逐光科普 · 版权所有
文章 13 · 2026 年 3 月
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
